悬挂式单轨最小曲线半径及 缓和曲线理论研究
2019-10-21韩冰欧成章
韩冰 欧成章

摘 要:由于目前国内尚未正式颁布悬挂式单轨相应的技术标准或设计规范,正在研究设计的线路大都参照德国 H-bahn 空中轨道列车的技术参数或 GB 50458-2008《跨坐式单轨交通设计规范(附条文说明)》进行设计,没有合理地结合悬挂式单轨自身独特的轮轨系统及转向架系统等特点,因此不能充分发挥其优势,这已成为我国建设悬挂式单轨最大的困难。在分析悬挂式单轨转向架工作原理的基础上,结合其自身独特的轮轨系统特点,研究悬挂式单轨最小曲线半径及缓和曲线的计算方法与取值,旨在为确定悬挂式单轨线路的设计标准提供参考。
关键词:城市轨道交通;悬挂式单轨;最小曲线半径;缓和曲线
中图分类号:U239.9
0 研究背景
随着社会经济的加速发展、城市化进程的加快和城市人口密度的不断增加,城市的交通压力也越来越大。如何有效地应对不断增长的城市交通需求,缓解日益突出的交通拥堵问题,已成为各大城市面临的首要问题。有效的解决方案是建设以大量的快速轨道交通作为骨干,中、小交通作为补充的轨道交通线网,实现地下、地面和高架三维交通全方位的发展。于是,各大城市在快速发展地铁、轻轨的同时,也在不断研究探讨新型轨道交通线网的规划与建设,如有轨电车、单轨交通、中低速磁浮等纷纷成为竞相研究的对象,我国上海、温州、佛山、天津、成都等城市先后研究规划建设悬挂式单轨系统。
1 结构与特点
1.1 结构
与其他轨道交通体系相比,悬挂式单轨交通系统具有独特的车辆转向架和轨道梁,转向架在轨道梁上运行而车体悬挂于轨道梁之下,如图1所示。
在悬挂式单轨中,轨道梁起着引导列车运行、承载列车质量的作用,是悬挂式单轨系统中最重要的组成部分之一,包括梁柱、轨道及道岔等部分。轨道梁一般为下部开口的箱型截面钢梁结构,走行轮和导向轮均放置在箱型梁内部,沿着内部的轨道运行,如图2所示。车辆行驶方向的改变通过箱型轨道梁内可动轨的水平移动实现。
悬挂式单轨系统的轨道梁支柱具有多种形式,如 “倒L”形、“T”形和“门”形等,可以适应不同情形下的架设需求,如图3所示。
转向架(图4)是悬挂式单轨车辆最重要的组成部件,每节车辆都装有2台转向架,主要由走行轮、导向轮、牵引电机、空气弹簧、构架、基础制动装置等组成。走行轮在走行轨上竖直平面内滚动,负责承载、牵引以及制动,2根车轴上共装有4个走行轮,由纵向牵引电机驱动;导向轮在水平面内转动,一共有4个,装在构架的4个角上,负责导向与缓和横向振动。走行轮和导向轮均配有备用轮,当其发生爆胎时,备用轮可保障行车安全。悬挂式单轨采用盘形制动,制动盘安装在牵引电机的转轴上。二系悬挂为空气弹簧,摇枕横跨在2个空气弹簧上。车体悬挂构件贯穿构架中心的孔,与摇枕连接。
1.2 特点
悬挂式单轨具有安全性高、低碳环保、投资少、施工简单、环境适应性好、美观与舒适度高等特点。
2 最小曲线半径
最小曲线半径是轨道交通设计的主要技术参数之一,关系到运输组织方式、速度目标值、乘客舒适度和列车运行的安全性,对线路的适用性、工程造价、平顺性和运营成本有很大的影响。如果曲线半径过小,会限制行驶速度,加剧车轮磨损,增加维修工作量,影响乘客的舒适度;如果曲线半径过大,线路无法适应地形,将增加工程造价,降低轨道交通的适用性。在工程设计中,应根据车辆类型、行驶速度、地形条件、运行安全和工程难度,确定线路平面曲线的半径。要确定线路的最小曲线半径,首先需要了解车辆的走行原理。
2.1 转向架的工作原理
通过分析悬挂式轨道交通系统动力学模型图(图5)可以看出,悬挂式单轨列车在运行过程中,车体在3个方向上产生运动:纵向x轴(列车运行的方向)、横向y轴(横向垂直于列车运行的方向)和竖向z轴(竖向垂直于列车运行的方向)。其中,纵向运动主要受机车的启动、加速、减速及紧急制动情况影响,横向运动主要是列车通过曲线或道岔时产生的离心力作用,竖向运动则与线路的纵坡有关。
悬挂式单轨走行在轨道梁内,梁内设有走行轨、导向轨及其他设备。走行轮、导向轮分别与走行轨、导向轨配合。为了使车体紧密、可靠地悬挂在转向架下,車体与构架之间设有悬吊杆,通过四连杆机构(由ABCD四铰接点构成,如图6所示)与转向架连接。该四连杆机构能够约束车体横向摆动,从而减少列车横向冲击的作用,同时四连杆机构还具有2个弹性止挡(K3和K4),起到横向限位的作用,即防止横向位移过大。
2.2 最小曲线半径计算的基本原理
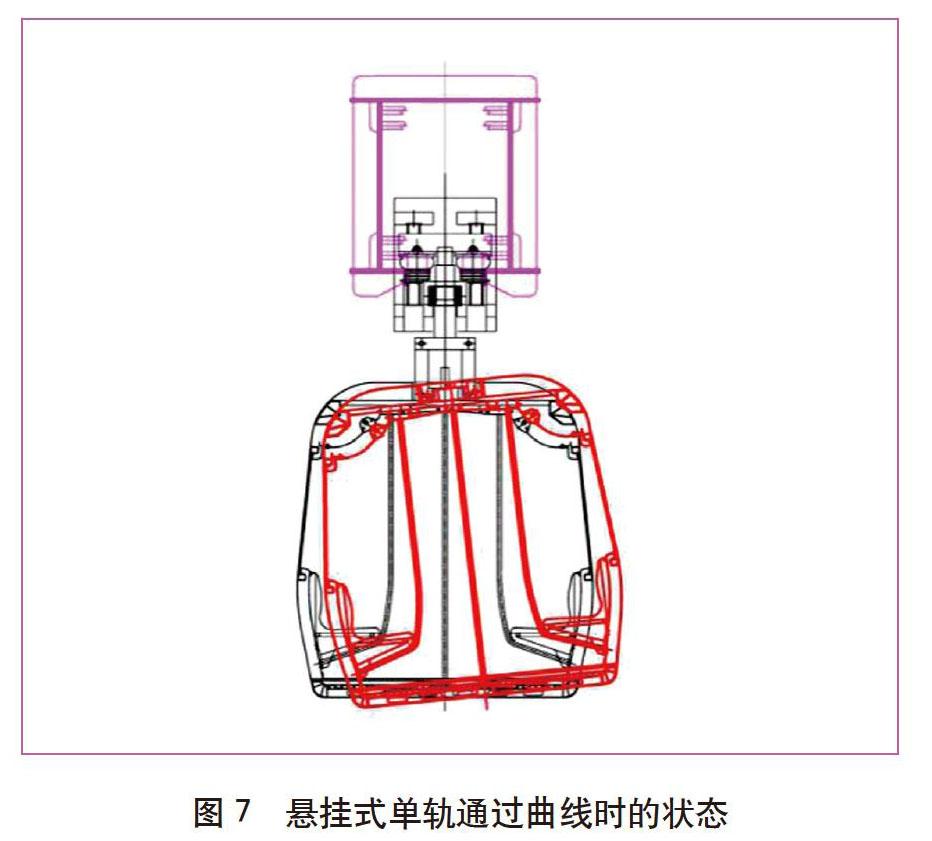
悬挂式单轨由于采用悬挂构件连接转向架和车体,其轨道梁内的走行轨不设超高和曲线加宽。当车辆以不同速度通过同一曲线地段时,由于离心力的作用会使车体产生不同程度的倾斜。当倾斜角小于悬挂式单轨的横向最大位移量时,车内乘客所受的地板支持力在水平方向的分力与离心力平衡,不存在未被平衡的离心加速度,因此乘客不会感到不适。随着速度的增大,离心力逐渐增大,车体倾斜角逐渐增大,车内乘客受到地板支持力与竖直方向的夹角也不断增大,其在水平方向上的分力也在不断增大,当车体倾斜角达到最大值时,车顶凸台上的横向止挡使得车体横向位移量不能继续增大。此时,若车辆速度继续增加,离心力无法完全被平衡,即存在未被平衡的离心力,车内乘客会逐步感受到不适。悬挂式单轨通过曲线时的状态如图7所示。
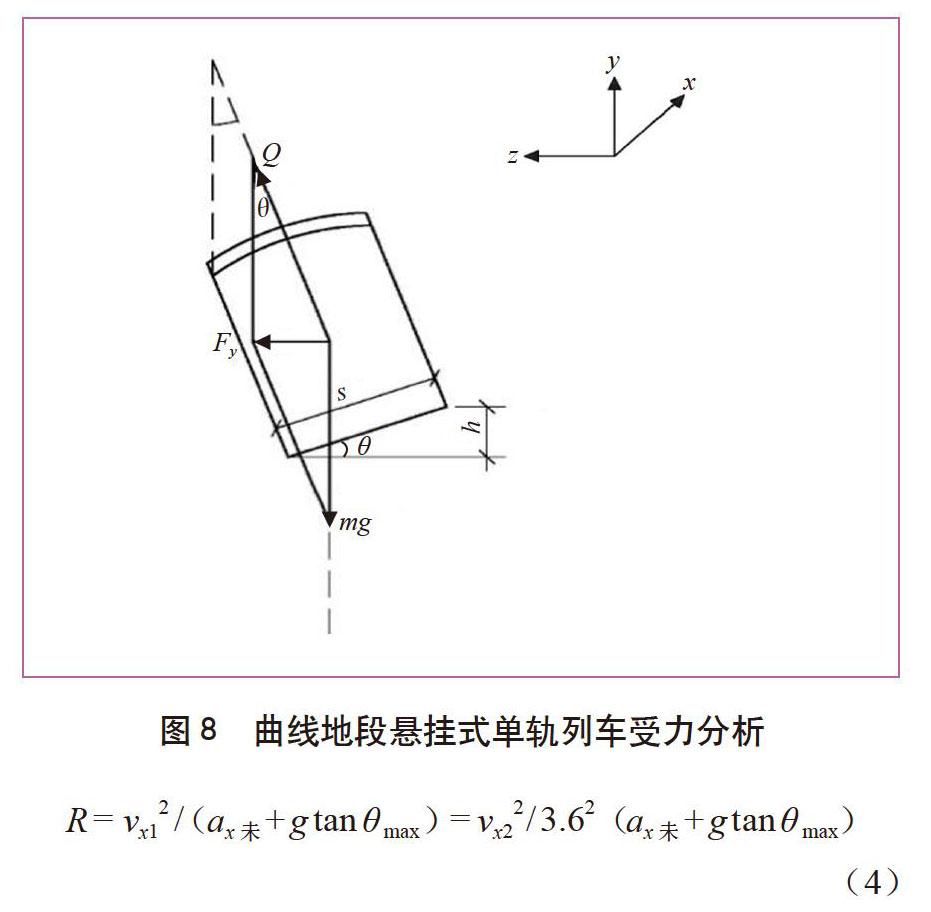
将悬挂式单轨车辆作为研究对象,其通过曲线时,车体倾斜角(即竖向偏移角)为θ,车体主要受到悬挂装置的拉力Q和自身的重力mg,由拉力Q和重力mg的合力形成向心力Fy,其受力关系如图8所示。
由图8分析可得:
向心力:
Fy = Qy = Q sinθ (1)
向心拉力:
Qz = Q cosθ = mg (2)
由于车辆本身质量的存在,会产生惯性,使车辆沿着运动轨迹的切线方向前进,即产生离心力J = mvx12 / R,其中:m为车辆的质量,t;vx1为列车横向通过速度,m/s;R为线路曲线半径,m。
当横向方向未被平衡的离心加速度ax未 = 0,即Fy = J,可得R = vx12 / tanθ。
当车体倾斜角达到极限值θmax后,存在未被平衡的离心加速度,即ax未 ≠ 0,则此时的离心力为:
J = mvx12 / R = max未 + mg tan θ max
(3)
由式(3)可得:
R =vx12 /(ax未 + g tan θ max)=vx22/3.62(ax未 + g tan θ max)
(4)
式(4)中,g为重力加速度,9.8m/s2;vx1为列车横向通过速度,m/s;vx2为列车纵向通过速度,km/h。
可见,平面最小曲线半径主要取决于列车运行速度、允许的最大未被平衡离心加速度和车体横向偏移的最大角度。
2.3 影响最小曲线半径主要参数的选取
2.3.1 列车运行速度的选取
根据国外悬挂式单轨的运营情况,德国最高行车速度设计为50 km/h,车辆构造速度为65 km/h;日本千叶都市线最高运行速度可达80 km/h。中车资阳机车有限公司目前提供的资料显示,悬挂式单轨最高运行速度可达65 km/h。本文确定悬挂式单轨的最高运行速度为65 km/h。
2.3.2 未被平衡离心加速度的选取
如果离心加速度不平衡,乘客可能会感到不舒服。不同国家的离心加速度允许值不同。德国试验表明,当不平衡离心加速度值为0.65 m/s2时,乘客无不良反应。英国实验表明,当不平衡离心加速度值为1.1 m/s2时,乘客有明显的感觉,但没有不适。美国试验表明,当不平衡离心加速度为1.15 m/s2时,乘客明显感觉到变化,但并未感到不舒服。法国和意大利的测试表明,当不平衡离心加速度为0.85 m/s2时,乘客不会感到不舒服。
在试验的基础上,中国铁道科学研究院集团有限公司将旅客舒适度指标分为4个等级:0级,旅客无感觉,舒适度好;1级,旅客有轻微感觉,舒适度适中;2级,旅客有明显感觉,舒适度可以接受;3级,旅客有强烈感觉,舒适度是不可接受的。试验结果表明,当平均舒适度指标和相应的不平衡离心加速度设定为0.4~0.8m/s2时,乘客无不良反应。
我国《地铁设计规范》(GB 50157-2013)第6.2.1第2款条纹说明中写道:0.4 m/s2属于无感觉或有感觉的临界线。考虑到地铁列车是属于城市公共交通,车内站立乘客较多,站立密度较高,但平均乘距较短,故选定0.4 m/s2比较适宜。悬挂式单轨作为城市轨道交通的一种,也可参照此规定执行,据此本文确定未被平衡的离心加速度按0.4 m/s2计算。
2.3.3 车体横向偏移最大角度的选取
传统的轨道交通一般在外轨上设置曲线超高,即在内轨高度不变的情况下抬高外轨,使轨道平面与水平面具有一定的夹角,称该夹角为超高角。
《地铁设计规范》(GB 50157-2013)第7.2.3中规定曲线最大超高应为120 mm。其条文说明中指出,曲线超高是根据列车通过曲线时平衡的离心力,并考虑两股钢轨垂直受力均匀等条件计算确定的;最大超高是根据最高行车速度、车辆性能、轨道结构稳定性和乘客舒适性确定的。经多年实践经验确定,最大超高值为120mm,转化成超高角为4.58°。
悬挂式单轨由于其特殊的悬吊形式,允许的最大倾斜角为6°,即超高角为6°。
2.4 最小曲线半径取值建议
根据式(4),结合不同速度计算的最小曲线半径结果如表1所示。
由表1可知,最高速度为65 km/h时的悬挂式单轨线路最小曲线半径宜为250 m。在具体设计中,可以根据不同的地形、线路条件、设计速度等灵活选择不同的平面曲线半径,并根据实际情况,在征地成本较高的城市中心区,通过限速等措施,适当降低平面曲线的半径值。
此外,双线中两线线间距不变的并行地段,其平面曲线应设计为同心圆。同心圆的曲线半径可为小数。
3 缓和曲线
在传统轮轨系统中,缓和曲线的作用主要是在缓和曲线长度内完成直线至圆曲线的曲率变化、轨距加宽和曲线超高的递变(顺坡)。但对于悬挂式单轨来说,车体悬挂于轨道梁下,走行轨设于轨道梁内,轨道梁不设曲线外轨超高及轨距加宽。因此,悬挂式单轨直线段和曲线段间的缓和曲线主要是完成直线至圆曲线的曲率变化,使列车安全、平顺、舒适地由直线过渡到圆曲线。
3.1 缓和曲线的线型
选择悬挂式单轨缓和曲线线型主要考虑的因素有:保证缓和曲线的起终点变化平顺、引起的沖击和振动较小、便于设计与维护、工程量合适等。三次抛物线缓和曲线线型,具有线型简单、设计方便、易于养护等优点。目前我国在客货共线铁路、高速客运专线、城市轨道交通上都首选三次抛物线缓和曲线线型。在研究悬挂式单轨线路缓和曲线时,本文仍选用三次抛物线缓和曲线线型。
3.2 缓和曲线的长度
缓和曲线的长度通常是越长越好,若太短,会给乘车舒适度带来显著影响。为使乘客乘坐舒适,跨坐式单轨和地铁设计规定离心加速度变化率ε为0.03 g/s,按其圆曲线半径及车辆运行速度来规定缓和曲线的最小长度,参照圆曲线有关规定,采用不小于20 m的缓和曲线长度。悬挂式单轨系统,由于轨道梁采用20 m或25m的跨度时,可采用标准等截面轨道梁桥设计,为节约设计和制作费用,在条件允许的情况下,缓和曲线的长度最好与轨道梁长度协调一致,避免一片轨道梁跨越3种线型,本文推荐采用不小于20 m的缓和曲线长度。根据离心加速度ay、离心加速度变化率ε和列车通过缓和曲线的时间t(s)可计算出缓和曲线的长度L。具体如下:
ay = vx32 / R (5)
ε = ay / t = vx33 / RL (6)
t = L / vx3 (7)
由式(5)~式(7)可得:
L = vx33/ ε R (8)
式(5)~式(8)中,vx3为列车设计运行速度,m/s;R为曲线半径,m。
若取ε = 0.03g / s≈0.03m / s3,则式(8)转化为:
L = vx43 /(0.3×3.63×R)≈vx43 / 14R (9)
式 (9)中,vx4为列车设计运行速度,km/h。
由式(9)计算得出的缓和曲线长度如表2所示。
根据以上公式计算可得:在曲线半径≥1500m、速度为65km/h时,离心加速度为0.217m/s2。当未被平衡的离心加速度为0.217m/s2时,对舒适度影响不大,可以不设缓和曲线。因此,规定在最高速度65km/h时,若曲线半径≥1500m,可不设缓和曲线;若曲线半径<
1500m的曲線,可根据曲线半径、列车通过速度等,参照表2中的缓和曲线设置。
3.3 圆曲线及夹直线最小长度
我国《地铁设计规范》(GB 50157-2013)第6.2.1第5款条文说明中规定:圆曲线最小长度规定为不小于1节车辆的长度,目的是避免由于1节车辆同时跨越在3种线型上,造成车辆运动轨迹过渡不顺畅而可能出现的脱轨事故。
《跨坐式单轨交通设计规范》(GB 50458-2008)第6.2.6条文说明中写道:一方面,由于圆曲线上曲率半径不变,车辆摇摆不大,故一定程度上圆曲线长一些为好,采用≥20 m的圆曲线长度。若条件允许,最好选择大于1片轨道梁的长度,避免1片轨道梁跨越3种线型,以减少轨道梁设计与制作的难度。
同理,悬挂式单轨圆曲线及夹直线最小长度,在满足大于1节车辆长度的基础上,应结合轨道梁的设计,一般轨道梁的跨度为20m、25m的等截面,为了易于设计和制造,由此确定悬挂式单轨圆曲线及夹直线最小长度应≥20m。
4 结束语
由于我国目前尚无悬挂式单轨列车实地运营试验,本文在分析悬挂式单轨独特的走行系统的基础上,采用的分析参数多取自地铁的调查所得,因此所得结论仍处于理论研究阶段,尚需进一步试验论证。
参考文献
[1]许文超.悬挂式单轨车动力学性能研究[D].四川成都:西南交通大学,2014.
[2]GB 50458-2008 跨座式单轨交通设计规范(附条文说明)[S].北京:中国建筑工业出版社,2008.
[3]GB 50090-2006铁路线路设计规范[S].北京:中国计划出版社, 2006.
[4]丁树奎,姜传治. 北京市域快轨新机场线关键技术及建设标准研究[J].都市快轨交通,2016,29(4):12-18.
[5]王仕春. 跨座式单轨交通线路设计[M].四川成都:人民交通出版社, 2005.
[6]中铁二院工程集团有限责任公司. 加榜百里梯田旅游观光火车一期工程可行性研究报告[R].四川成都:2017.
[7]中铁二院工程集团有限责任公司. 贵阳市轨道交通2 号线一期工程长大连续坡道段方案及运营安全研究[R].四川成都:2014.
[8]中铁二院工程集团有限责任公司. 陕西韩城空轨工程可行性研究报告[R].四川成都: 2016.
[9]中铁二院工程集团有限责任公司. 大邑晋源至安仁旅游基础设施—空铁试验线工程可行性研究报告[R]. 四川成都:2017.
[10] GB 50157-2013 地铁设计规范[S].北京:中国建筑工业出版社,2014.
收稿日期 2019-04-28
责任编辑 党选丽
