高株果树自动喷药机控制系统的研究设计
2019-10-21李蜀予张清林
李蜀予 张清林

科学技术的提高带动了农业生产力的发展,植保机械开始在农业领域应用,随着国家大力度对农业投入补贴,现代化植保机械逐步走进了普通农户家庭。植保机械的应用不仅解决了农村劳动力的不足,提高生产效率和农业的精准度,也在卫生安全方面发挥了巨大作用。植物保护已成为农林生产的重要组成部分,是推动农林业高产丰收的关键因素之一。我国植保机械是在解放后才逐步发展起来的,主要是化学农药喷洒机械从无到有,经历了漫长的发展过程,虽然部分植保机械已达到或超过世界先进水平,但与国外一流的植保机械相比,仍然满足不了农业产业发展的需求,植保机械已经成为我国农业全程机械化的短板。现有的大多数植保设备结构简单,功能相似,专业水平不高,不能满足不同植被、不同病虫害防治的需求。传统的背负式植保机械依然占据着主导地位,我国的大面积自动化的植保机械的发展仍有很长一段路要走。
果树是重要的农业经济作物,做好果树栽植是提高农民收入的重要途径之一。在果树养护方面,做好病虫害防治工作是保证果树健康生长的重要工作环节。防治树木的病虫害,就要喷洒农药。随着高株果树产业快速升级及农村劳动力的就业转移,越来越多的果农采用现代矮化密植栽培模式来提高产量,与之配套的喷药机作业范围及自动化程度就提出了新的要求。
传统的果树喷药设备是人工手动背负式,不仅效率不高,还存在农药对作业人员毒害的隐患。这些人力大量参与的喷药设备优点是可以实现与果树的近距离喷洒,但作业范围较小,同时对于大多数果树植物,藏于树叶底部的蚜虫往往会在这种自上而下的喷洒作业中存活下来。我国目前使用的配有拖拉机等动力拖曳的农用喷药设备大大改善了工作环境,可以进行大面积喷洒。但动力拖曳喷药设备对作业空间、地平条件要求严格,属于远距离喷洒,不能对果树特定区域病虫害进行接触防治,而且农药使用的效率较低,有资料统计不超过40%,大量的残余农药飘移到空气或地面,污染作业环境,对人体同样造成伤害。有报道,国外有一种使用效率较高的隧道式循环喷雾机可以有效减小飘移、回收雾滴,提高农药利用率,但其结构庞大,需要多人同时操作,使用成本较高,而且劳动强度较大,不太适合小型农户使用。
综上可知,高株果树喷药机未来的发展趋势就是智能化、自动化。将现代先进的计算机智能技术应用到传统的喷药设备,结合PLC自动控制系统,不仅可以提高喷药的精准度和有效性,还可以减少农药喷洒过程对人体的伤害,降低人工劳动强度。
一、研究思路
现有的高株果树喷药机最大的缺陷就是需要人工操作,存在药物危害隐患,如何让喷药机无人驾驶就是关键。本文提出一种用于高株果树的自动喷药机,可以在远程控制下实现自走功能,进行无人驾驶操作,从而避免因喷药对操作人员身体健康的危害;可实现一人多机控制管理,提高生产效率,减轻劳动力;机架结构可以自动调整行距,提高喷药机的通用性;可根据果树株高实时调节喷药架高度,减少喷药作业过程中药物的挥发,提高药物利用率。
基于此,整套喷药设备从机械结构和控制系统两个方面进行了设计,机械结构主要由前轮转向机构、高度升降机构、喷药架伸缩机构、机架调整机构组成,在喷药机行走中前轮可以根据作业需求自动转向,喷药架高度可以调节实现不同果树株高的喷洒要求,喷药架长度伸缩进行喷洒工作面积的改变,机架调整机构可以改变车轮间距以适应不同的果树行距。控制系统由液压系统和PLC控制系统组成。液压系统是动力转换系统,在PLC的控制下工作,PLC下达指令进行液压系统各个电磁阀的通断,实现液压缸活塞的升降从而推动各机械结构间的运动,最终达到喷药机的作业要求。PLC是控制系统的核心,根据传感器的信号及时调整喷药机的运行过程。
二、系统组成
液压系统按照功能划分主要由喷药架升降和启闭系统,喷药机行走系统,喷药机转向控制系统三个系统组成。喷药机的各个液压系统由中央控制器控制,该控制器由FX2N-64MR型PLC组成,执行各个控制程序,实现控制功能。整个液压系统总体采用电磁控制技术进行系统的控制,由三个双向定量液压泵提供动力,分别给喷药架升降和启闭系统、喷药机行走系统、转向控制系统提供动力。
喷药架升降和启闭系统的液压工作原理见图1,图中系统使用两个三位四通电磁换向阀控制两个二级伸缩液压缸来分别实现驾驶室与喷药架的升降功能,用两个普通液压缸控制喷药架主杆的启闭与闭合,用两个摆动马达控制喷药架支杆的启闭与闭合。液压缸和摆动马达使用同样的三位四通电磁换向阀来控制,操作人员也可以远程控制电磁阀来进行两个主杆、两个支杆的启闭和闭合。
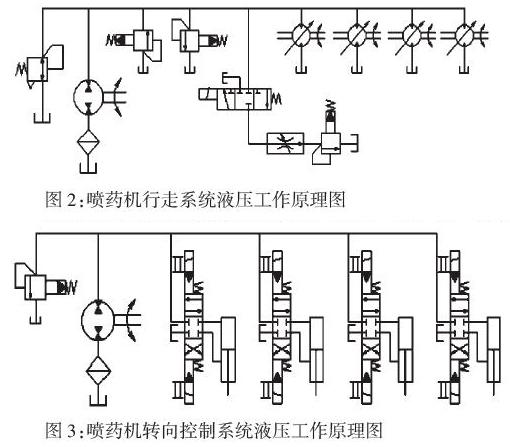
喷药机行走系统液压工作原理见图2,该行走液压系统采用由一个双向定量泵供压,四个双向变量液压马达并联控制四个车轮,车轮转速的大小通过双向变量马达输出转速的调节来控制,采用三位四通电磁换向阀、调速阀、先导溢流阀组成的自由分流系统以达到提高功率利用率和节能的效果。该液压系统采用闭式静液压传动方法,并设有一对先导阀实现系统的安全保护。
喷药机转向控制系统液压工作原理见图3,由图可知,喷药机的四个转向液压缸连接了四个车轮的转向机构,分别由四个电磁比例方向阀控制,噴药机的PLC控制系统可根据输入变量控制四个电磁比例方向阀的输出变量,从而对四个转向液压缸的伸出长度进行控制,以达到喷药机转向控制的目的。
自动喷药机控制系统使用柴油发电机电,采用FX2N-64MR型PLC作为核心控制装置,操作者利用触摸屏通过串口通讯发送的控制参数命令PLC执行程序,PLC与传感器进行串口通讯,采集植物高度、垄间距、转向轮位置等信息迅速做出反馈,PLC通过串口通讯控制伺服系统实现喷药机的行走和转向,控制液压泵和喷头电机运转实现喷药架的喷药工作,控制安装在喷药机机架上的电动推杆运转,实现喷药机架高度的调节、车轮间距的调节等动作,从而完成喷药机自动化行走和合理化喷药等过程。
三、工作原理
自动喷药机控制系统的PLC控制程序主要包括:伺服电机控制程序、传感器信息采集与喷药架高度调节程序、触摸屏与PLC串口通讯程序。控制系统电路分为主电路和控制电路两部分,主电路给整个系统中的伺服驱动器、伺服电机、电动推杆、PLC等供电。控制电路是由以PLC为核心的伺服系统控制电路、电动推杆控制电路等组成。
伺服系统控制电路给DVP-20PM控制器供电,连接伺服驱动器实现整个传动系统高精度的定位。电动推杆控制电路中将交流电转换为24V的直流电,给两个喷药架高度控制电机供电。DVP-32HN控制器完成喷药架主杆、支杆的启闭动作,以喷药架闭合动作为例,控制器通过控制电磁阀的启闭来完成喷药架主杆的闭合动作,当操作人员远程发出一个主杆闭合指令时,控制器接受主杆闭合信号,并开始判断支杆是否闭合,若支杆没有闭合,则指令无效,主杆无法闭合;如支杆己经闭合,则控制器发出信号触发主杆电磁阀工作,主杆闭合至触发行程开关位置,运动停止,主杆闭合动作完成,喷药架展开动作类似。
传感器信息采集与喷药架高度调节程序通过传感器用于采集喷药架与果树之间的距离,将采集到的距离与预设的喷药架与果树之间的距离作比较,并驱动用于喷药架高度调节的电动推杆运行,使喷药架与果树保持较好的喷药距离,减少喷药过程中农药的过度挥发,提高农药的利用率。
触摸屏与PLC串口通讯程序控制伺服电机实现喷药机的行走及转向功能,由触摸屏、PLC、伺服驱动器、伺服电机组成。触摸屏向PLC发送布尔型行走控制命令,PLC接受到控制命令后,使程序中相应的运动控制功能块工作,PLC就向伺服驱动器传输脉冲,伺服驱动器接收到脉冲并解析后发送到伺服电机,驱动伺服电机转动,实现喷药机的行走功能。
控制系统有两套伺服电机系统来完成喷药架的行走与转向,采用功率较大的伺服电机系统执行喷药机前行、后退等动作,采用功率小的伺服电机系统作为喷药机的转向装置,PLC通过控制这两套伺服系统工作情况就可实现喷药机的行走过程。喷药机控制系统的PLC接收到触摸屏发送的前行命令后,首先根据传感器发送的信号判断喷药机前行方向是否有不可超越的障碍,如果有障碍,PLC不执行前行指令并产生报警信息,同时PLC将障碍信息反馈给触摸屏,由操作者判断是否改变喷药机前行方向绕开障碍;如果没有障碍,PLC执行前行命令,使噴药机按照触摸屏指定的路线前行。
总上所述,本文主要对高株果树自动喷药机控制系统进行了研究与设计,机械结构做了次要说明,控制系统包括喷药架升降和启闭系统,喷药机行走系统,喷药机转向控制系统。分别绘制了各系统的液压传动原理图,及自动喷药机控制系统的PLC控制程序的部分电路原理图、控制框图和控制流程图。为高株果树喷药机的自动化研究提供一定的参考价值。
为了适应不同用户、不同地形的需求,高株果树喷药机自动控制系统在未来的设计中应需要注意以下要求:(1)控制模式要求:既可以人工远程控制,也可以自主控制;(2)行走要求:行走速度可以自由调控,可以自由转向;(3)信息采集要求:可以采集果树的株高,便于调控喷药架与果树之间的距离,能够采集前转向轮的左、右极限位置和正中位置,以防喷药机行走过程中因转角过大自停。
(作者单位:750021宁夏工商职业技术学院)
