履带式管道机器人的结构设计与运动学分析
2019-10-21李帅衡
李帅衡

摘要:创新设计了一种履带式管道机器人平台,其可以根据用户需求加装不同的操作器,拓展了管道机器人的通用性,满足用户的个性化需求。对机器人的管径适应机构,爬升机构,齿轮系驱动机构进行了设计;通过运动学分析,得到了管径适应机构的运动特性;研究工作对管道机器人的设计具有参考意义。
Abstract: This paper innovatively designed a crawler pipeline robot platform, which can install different operators according to user requirements, expand the versatility of pipeline robots and meet the individual needs of users. The pipe diameter adapting mechanism, climbing mechanism and gear train drive mechanism of the robot are designed. Through the kinematics analysis, the motion characteristics of the pipe diameter adapting mechanism are obtained. The research work has reference significance for the design of the pipeline robot.
关键词:管道机器人;结构设计;运动学分析
Key words: pipeline robot;structural design;kinematics analysis
中图分类号:TP242 文獻标识码:A 文章编号:1006-4311(2019)24-0197-03
0 引言
改革开放以来,随着经济的日益发展,我国的城市化率不断提高,城市排水系统的规模也越来越大;但是随着长时间的淤泥沉积,部分管道开始出现管道堵塞,外溢污水等情况,这严重污染环境,同时给社会经济造成巨大损失[1]。另一发面,对于化工类等管道,其内部损伤等会对管道的安全造成严重威胁,而通常这类损伤在管道内部,不易被发现[2]。针对这些问题,管道机器人应用而生,管道机器人也成为国内、外相关领域研究的重点[3],出现了各类专用管道机器人。常鹤轩等设计了一款新型的单驱动蠕动式管道机器人[4]。薛耀勇[5]等通过建立静力学平衡方程对管道机器人进行了越障过程的受力分析,根据机器人越障所需对管道内壁提供的正向压力设计了自动适应元件圆柱螺旋弹簧,利用ADAMS对自动适应机构进行了动力学仿真分析。目前,管道机器人根据其行走机构主要分为蠕动式,脚式轮式和履带式等[6]。履带式管道机器人能够很好的适应管道的变化,有良好的机动性能,在越障和爬行等发面有比较明显的优势。有鉴于此,本文设计一种履带式管道机器人,对其结构组成,传动系统,运动学等进行分析。该管道机器人为管道检测,管道清淤等提供了一个机器人平台,其上可以加装各种操作器,进而实现不同的功能。
1 履带式管道机器人的结构设计
1.1 管道机器人的整体结构设计
履带式管道机器人主要包括管径适应机构,履带式爬升机构以及齿轮系驱动机构,电源系统,控制系统等。如图1所示为该履带式管道机器人的整体结构示意图。
管径适应机构可以设置3或4个,其沿基体的轴向均布在基体的周边,每个管径适应机构上对应设置有履带式爬升机构。齿轮系驱动机构设置在基体内部。基体的上部设置有操作器安装部,其可以用来安装摄像头或者操作手等。基体的上部设置有照明灯,为机器人进行操作时提供照明。
1.2 管径适应机构的结构设计
管径适应机构主要包括曲柄A,曲柄B,连杆,丝杆,异形螺母等。参见图1,曲柄A,曲柄B,履带式爬升机构本体以及基体之间形成平行四边形机构;连杆一端与履带式爬升机构本体铰接,另一端与异形螺母铰接,异型螺母与丝杆形成螺旋副,丝杆两端与基体分别铰接。当丝杆在齿轮系驱动机构的作用下转动时,进而使异形螺母移动,进一步通连杆推动履带式爬升机构本体伸展或收缩,进而使得该机器人可以适应不同直径的管道。
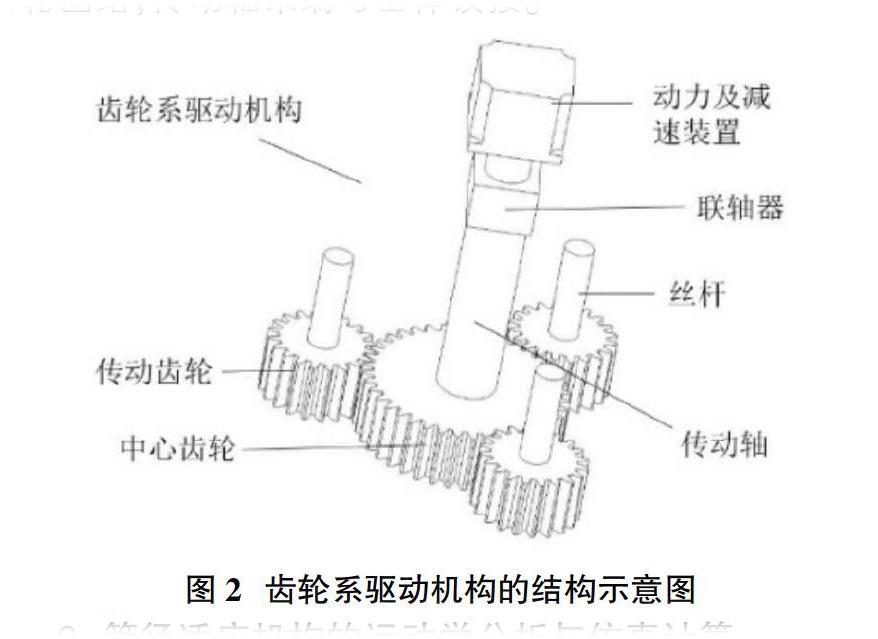
1.3 履带式爬升机构和齿轮系驱动机构的结构设计
履带式爬升机构主要包括驱动装置、主动同步带轮、被动同步带轮以及多个支撑轮、履带等。驱动装置带动主动同步带轮转动,进而带动履带,实现爬升。齿轮系驱动机构主要包括动力及减速装置、中心齿轮、联轴器、传动轴以及3个传动齿轮等。如图2所示为齿轮系驱动机构的结构示意图。传动齿轮固定在丝杠上。动力及减速装置输出轴通过联轴器与传动轴连接,传动轴穿过中心齿轮并与中心齿轮固结,传动轴末端与基体铰接。
2 管径适应机构的运动学分析与仿真计算
2.1 管径适应机构的机构运动简图
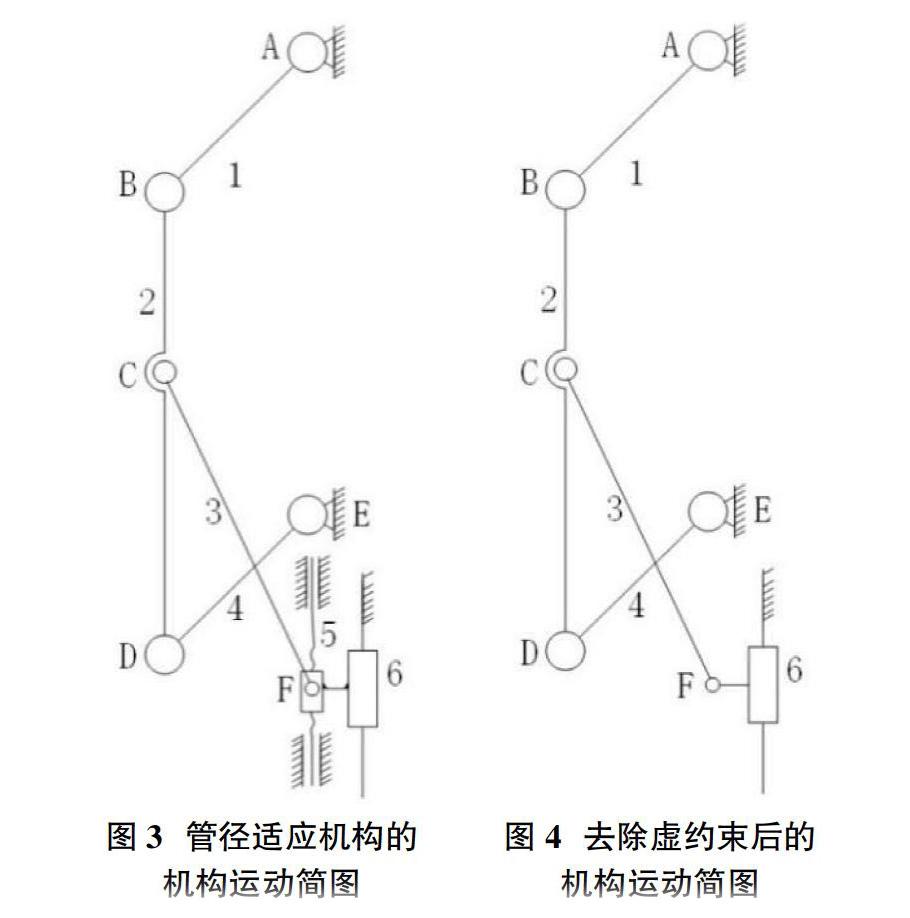
分析管径适应机构的运动传递情况,其包括6个活动构件,1-曲柄A,2-履带式爬升机构本体,3-连杆,4-曲柄B,5-丝杆,6-异型螺母,以及机架(机器人基体)。其机构运动简图如图3所示。分析可知管径适应机构中存在3个平行虚约束,进一步去除机构的虚约束,可以得到管径适应机构简化后的机构运动简图(见图4)。
2.2 管径适应机构的自由度计算
通过前一节绘制了管径适应机构的机构运动简图,进一步计算管径适应机构的自由度。
平面机构的自由度计算公式如下:
2.3 管径适应机构的ADAMS仿真分析
为进一步分析丝杆转动速度与履带式爬升机构本体伸展或收缩距离之间的关系,在ADAMS机械系统动力学仿真软件中间建立管径适应机构的简化模型,如图5所示。
仿真参数如下:
曲柄A和曲柄B的长度均为:150mm,履带式爬升机构本体的长度为:200mm,连杆的长度为:300mm,初始状态连杆与丝杆轴线之间的角度为:30°,曲柄A处于水平位置,连杆铰接于履带式爬升机构本体的中点;丝杆保持匀角速度转动,转动速度为:100r/s,异型螺母的螺距为:1mm,仿真时间:2s。进一步得到如图6-图8结果。
通過仿真结果分析可知,在丝杆保持匀角速度转动时,爬升机构本体质心的位置变化并不是匀速的。随着时间的推移,爬升机构本体质心位置的变化速度越来越快;也即随着异型螺母向上移动,爬升机构本体收缩的越来越快。
3 总结与创新点
管道机器人在管道清淤,管道损伤检测等领域具有广阔应用前景。本文创新设计了一种履带式管道机器人平台。该管道式机器人的特点在于可以根据用户的需求安装不同的操作器,能够满足用户的多样化需求。通过机构分析,以及ADAMS仿真分析,对管径适应机构的运动特性进行了仿真研究。该机器人可用于城市管道清淤,化工管道、油管裂缝检测等。未来,可进一步对该机器人的操作器等进行研究,使其能更好地为人们的生产生活服务。
参考文献:
[1]沈体强.城市排水管道清淤机器人研究综述[J].山东工业技术,2016(20):289.
[2]张卓,陈旭,王文斌.智能管道探测机器人的研制[J].无线互联科技,2017(3):122-124.
[3]赵建伟,杨壘,商德勇.薄煤层工作面巡检机器人越障动力学建模与分析[J].制造业自动化,2015(15):7-9.
[4]常鹤轩,陈清.新型管道机器人设计及仿真研究[J].工艺设计改造及检测检修,2018(21):80-81.
[5]薛耀勇,张继忠,张磊.管道机器人自动适应机构设计与越障分析[J].制造业自动化,2018,40(06):29-32.
[6]李磊,叶涛,谭民.移动机器人技术研究现状与未来[J].机器人,2002,24(5):475-480.
