电动空调伺服系统设计与试验方法
2019-10-19尹彦秋
尹彦秋


摘 要:電动空调伺服系统,作为在新能源汽车所有辅助系统中关键子系统,其功耗是最大的,通过提高电动空调伺服系统的效能比,它可以进一步降低新能源汽车的能耗率,有助于改善新能源汽车的续航里程。 新能源电动空调伺服系统,具有传统的内燃发动机驱动空调伺服系统所没有的能效优势。根据空调压缩机的负载特性和节能要求,选用永磁同步电机(PMSM),通过采用无传感器技术和滑模观测器法来估算转子位置,并结合锁相环技术实现对动态响应要求更高的转子速度值的估算,利用转子位置预定位和 I- F启动策略,使用 PDFF调节器,可以抑制速度波动,从而提高系统动态性能。
关键词:电动空调;永磁同步电机;滑模观测器;无传感器控制;锁相环
1 概述
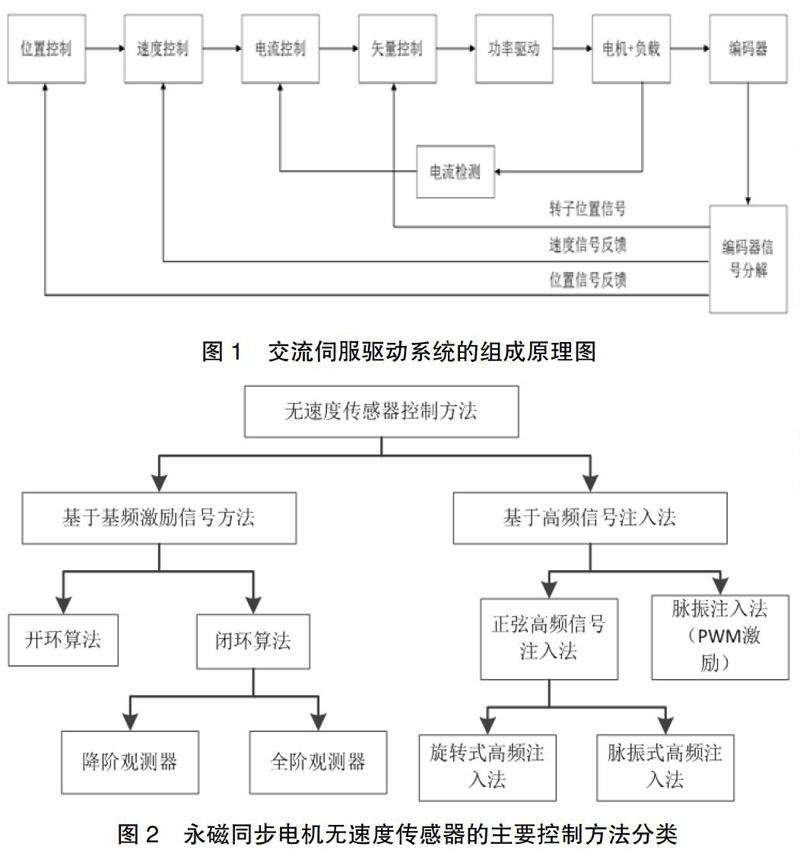
近年来,随着国家将新能源汽车上升至国家战略,传统汽车以及非传统势力纷纷进场,以谋求新一轮新能源汽车发展红利。2019年3月国家四部委联合印发《关于进一步完善新能源汽车推广应用财政补贴政策的通知》,通知明确对新能源汽车能量消耗率提出了更高要求。电动空调系统, 作为新能源汽车的一个关键分子系统,同时也作为新能源汽车的能耗“大户”,业已成为各主机厂在新一轮降能耗技术所革新的目标。通过提高电动空调伺服系统的效能比,其可以进一步降低新能源汽车的能耗率,有助于改善新能源汽车的续航里程。本文提到的电动空调伺服系统采用永磁同步电动机(PMSM)驱动的空调系统,其组成原理如图1所示,由于其卓越的性能特性,如高控制精度,高扭矩密度和良好的扭矩稳定性, 在交流调速中获得了广泛的应用。永磁同步电机伺服系统,具有更高的性能位置和速度要求,当电机参数改变或电机负载转矩及其转动惯量发生变化时, 系统仍具有很强的抗扰度。 反过来,由于外部因素的变化,系统的相关特性也不会发生改变,但因其对高性能的控制要求,需要精确的转子位置和速度信号,为了克服传统机械位置传感器的低可靠性和难以维护的问题,通过使用无速度传感器矢量控制,可以直接避免机械传感器的不利影响。永磁同步电动机主要控制方法如图2所示。
2 系统电路工作特性
通过对比分析目前国内外对速传感器控制技术的研究,可以知道其中的大部分方法都只适用于电机的中、高转速,相关研究存在对电机动态参数敏感,抗扰性差且存在难以实施的问题。在进行伺服系统的设计过程中对需要进行全方位考虑,其要求伺服系统兼具快速响应、控制精确以及对参数变化和扰动具有自适应性等特性。抑制负载转矩及惯量的变化对PMSM伺服系统所产生的不良影响的方法大致可分为两类:(1)可通过更改PID控制器结构实现;(2)通过调整PID控制器参数实现。PID控制策略适用于高性能要求,难以完全满足控制要求,并且通过将非线性控制链路成功引入控制系统,获得了线性控制结构不具有的优点。 结果如图3所示。
通过滑模观测器,实现电机在高速下无传感器矢量控制电机系统的转速自检测,该检测方式不仅能够适用于高速运行的伺服电机系统,并能够使系统获得更强的抗扰性和更好的动态响应特性。因此,构建了PMSM无传感器矢量控制系统的硬件平台。如图4所示为伺服系统整体硬件电路图。
本文采用无传感器技术,采用滑模观测器方法估算转子位置,结合锁相环技术,实现对转子速度估值的响应。控制速率主要通过扩展状态观测器和非线性误差反馈,并由位置环ADRC予以实现。 其结构图如5。
根据ADRC的设计原理,通过结合永磁同步电机的位置和转子速度之间的关系,并根据伺服系统控制结构,知晓位置环的输出信号即为速度环控制信号的输入,通过估计时变非线性干扰值,得出结论:
伺服系统的位置环ADRC包括跟踪微分器(TD),扩展状态观察器(ESO)和非复合线性(CNF)状态反馈控制速率。 如图6所示为位置环ADRC结构:
其中,是伺服系统转子的实际输出转速,则是对的状态估值,和是实际转速和实际转速状态估值二者之间的误差,是实际转速和实际转速状态估值两者之间跟踪速度因子,为伺服系统滤波因子,为伺服系统非复合线性状态因子,是对伺服系统转子位置的跟踪,是对伺服系统位置环的状态估值,是速度环给定的转速值。
基于负载转矩观测器的转动惯量辨识ADRC系统,通过与传统的伺服系统的控制设计理论方法相结合,可以对未知扰动实现快速准确地辨识,通过ESO的精确补偿,进一步提高了系统的检测精度及动态响应速度,其结果如图7所示。
3 系统控制策略与实现
近年来PMSM控制系统的控制策略发展不仅实现了转子的高精度及动态响应速度,并且满足伺服电机系统在高速环境下能够正常运行的要求。本文系统的主要控制策略为:基于ADRC的抗扰动策略,通过分别在速度环和位置环上增加ADRC控制器,并在主策略中加入初始化的系统变量、初始化的引脚功能和初始化的外围控制电路。 作为整个控制策略的核心部分的中断程序,其包括: 定时器中断和串行通信中断。 模数转换器( A/ D)中断在整个策略中享有最高优先级,其主要任务是注入脉冲宽度调制( PWM)周期的 N个样本的平均值。 串行通信中断在整个策略中享有最低的优先级,其主要任务是满足数字信号处理器(DSP)和上位机之间的通信。PMSM伺服系统初始化控制策略流程如图8所示。
初始化的控制策略主要包括初始化系统变量和系统控制寄存器,初始化系统外部扩展接口、初始化中断寄存器和事件管理器EVA、初始化模数转换器(A/D)及初始化数模转换器(D/A)。
在给定的定时器中断策略中,基于滑膜观测器法和旋转高频注入法获得的两种转子位置与转速值的检测方法将分别被调用。如图9所示为定时器中断控制策略流程图。
通过对伺服系统输入一个转速值,并让系统维持在所输入的恒定转速下工作,通过实现负载的突然变化(加载),观测伺服电机系统的动态响应时间,来确定负载的变化对电机转速所产生波动的影响,进而判定策略是否具有有效性。如图10所示,在电机给定转速1500r/min负载由空载情况下突变负载时,波形从上到下依次为:(1)电机工作在稳态下;(2)负载突变时的实际转速、估计转速和转速误差的波形。从测试结果来看,尽管观测到底力矩的波形虽有波动,但还是可以确保观测值趋于准确值。
4 结语
本文分析了滑模变结构控制,并结合速度环和位置环ADRC控制器的控制策略,并且基于无速度传感器矢量控制的基本原理,改进了传统的控制方法。从总体硬件和策略设计两个方面给出了基于PMSM伺服电机系统的无速度传感器矢量控制系统的实现方法。 测试结果表明该控制系统是可以稳定可靠运行的。
参考文献:
[1]方斯琛,周波.滑模控制的永磁同步电机伺服系统一体化设计[J][J].中国电机工程学报,2009,29(03):96-101.
[2]梁艳,李永东.无传感器永磁同步电机矢量控制系统概述[J].电气传动,2003,33(04):4-9.
[3]韩京清.自抗扰控制技术[J].前沿科学,2007(01).
[4]李永东.交流电机数字控制系统[M].机械工业出版社,2011:2-7.
[5]韩京清.从PID技术到“自抗扰控制”技术,控制工程,2002,9(03):13-18.
[6]姬志艳,李永东.无速度传感器异步电动机直接转矩控制系统的研究[J].电工技术学报,1997,12(04):15-19.
