不确定分数阶Genesio混沌系统的反演滑模同步
2019-10-19
(河南科技大学 信息工程学院,河南 洛阳 471023)
分数阶微积分是研究分数阶次的微积分算子特性以及分数阶微分方程的理论,已经有逾300年的历史。随着对分数阶微积分研究的不断深入,研究者普遍认为分数阶微积分是整数阶微积分的自然推广[1],极大地扩展了人们所了解的整数阶微积分的描述能力。现今,混沌现象不仅是物理界研究的热点,也受到了工程技术界的广泛关注。近年来,混沌系统的控制与同步已成为控制理论与控制工程领域的重要研究内容。
自1990年Pecora和Carroll提出混沌同步的思想以来,混沌系统的同步问题研究得到了蓬勃的发展[2-5],随着分数阶微积分的发展以及混沌系统研究的深入,分数阶混沌系统同步及其应用已经成为非线性科学中的一个重要研究课题[6-14],提出了很多分数阶混沌系统的同步方法,如模糊控制[9]、变结构控制[10]、非线性控制[11]、自适应控制[12]、耗散控制和反演控制[13]等等。其中反演方法是最常用的方法之一。该方法在递推过程中,巧妙的构建李雅普诺夫函数并且设计虚拟控制输入[15-16],而真实控制输入根据反馈设计,在递推终端得到,最终基于李雅普诺夫稳定性理论得到系统受控稳定的充分条件。针对分数阶Genesio-Tesi混沌系统,文献[14]设计了反演控制器,使得分数阶Genesio-Tesi主从混沌系统达到同步。文献[17]讨论了带有未知参数的分数阶Coullet混沌系统的同步问题,设计了自适应反演控制器。
另一方面,滑模变结构控制已经形成了一个相对独立的研究分支,适用于线性与非线性系统、连续与离散系统、确定性与不确定性系统等,在实际工程中逐渐得到推广应用。滑模控制在混沌系统的同步研究中也得到了应用,文献[18]针对一类带有外部扰动的分数阶混沌系统,研究了自适应滑模同步问题;文献[19]采用主动滑模控制探讨了分数阶主从结构混沌系统的同步问题。针对带有时滞的分数阶混沌系统,文献[20]基于自适应模糊滑模控制研究了两个不同的带有不确定参数的分数阶时滞混沌系统的同步问题。
自整数阶Genesio-Tesi混沌系统在1992年提出以来[21],分数阶Genesio-Tesi混沌系统也得到了众多学者的重视。文献[22]利用一个标量驱动信号,使得分数阶Genesio-Tesi混沌系统达到同步;文献[23]基于主动控制和滑模控制两种方法,研究了分数阶Genesio-Tesi混沌系统的混沌动态及其同步问题。虽然针对分数阶Genesio-Tesi混沌系统的同步已有一些研究成果,但是基于反演滑模控制技术,实现分数阶Genesio-Tesi混沌系统同步的研究仍然是一个空白。
本研究分析带有参数不确定和外部扰动的分数阶Genesio-Tesi混沌系统的结构特点,用反演设计方法在递推过程中对Lyapunov子函数和虚拟控制输入进行设计,并在反演终端加入滑模控制律,完成了能够使带有参数不确定和外部扰动的分数阶响应系统与分数阶驱动系统渐近同步的反演滑模控制器的设计。最后利用数值仿真验证提出的分数阶Genesio-Tesi混沌系统反演滑模同步算法的有效性。
1 分数阶Genesio-Tesi混沌系统
由于Genesio-Tesi系统具备混沌系统的很多特征,因此成为混沌系统的代表之一。该系统包含了一个平方项和三个简单的微分方程且微分方程取决于三个正实参数,其系统动态方程为
(1)
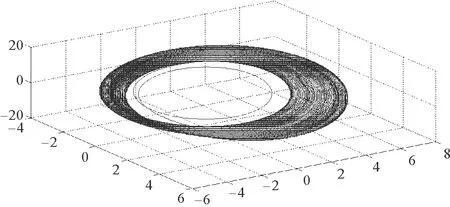
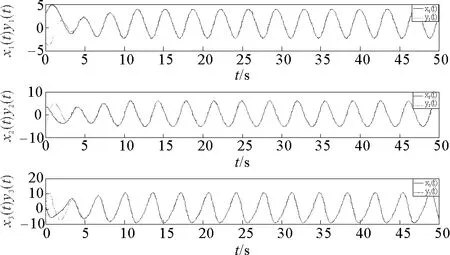
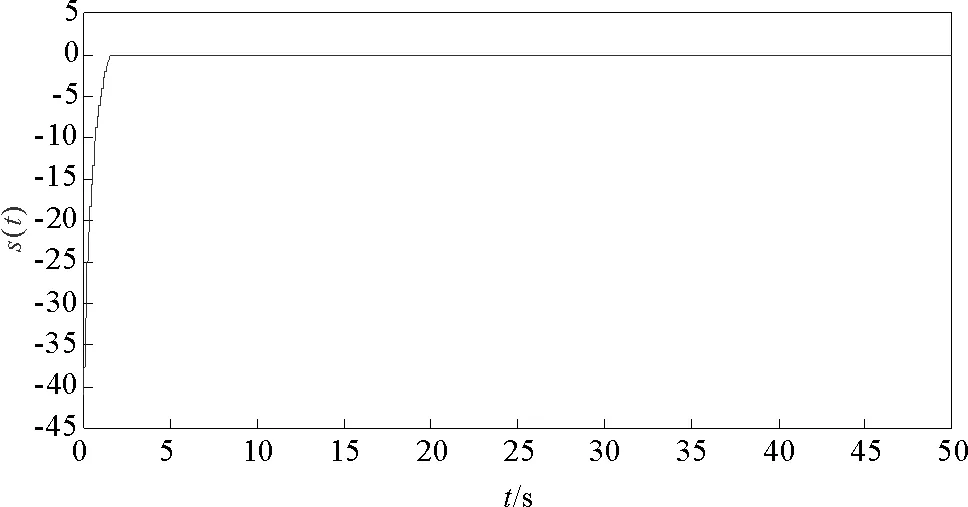
式中:x1,x2,x3是状态变量;a,b,c是正实数且满足ab 为了观测Genesio-Tesi混沌系统的同步现象,设定系统(1)为驱动系统,作为系统(1)的响应系统的动态方程为 (2) 式中:y1,y2,y3是状态变量;a,b,c是正实数且满足ab 需要设计一个控制器u(t)来控制响应系统,使响应系统(2)与驱动系统(1)实现渐近同步。考虑到实际情况中不可避免地存在不确定项与外部扰动项,设计受控的响应系统: (3) 式中:y1,y2,y3是状态变量;a,b,c是正实数且满足ab 驱动系统(1)和受控响应系统(3)之间的误差信号e(t)的数学模型如下: (4) 在控制器u(t)作用下,系统(3)与系统(1)实现渐近同步,也就是说误差信号e(t)收敛至零。其误差信号e(t)的动态模型如下: (5) 将分数阶Genesio-Tesi混沌系统的模型描述为 (6) 式中:α为分数阶且0<α≤1;x1,x2,x3是状态变量;a,b,c是正实数且满足ab 同理,由系统(2)可以得到系统(6)的响应系统的动态方程 (7) 其受控的分数阶响应系统模型为 (8) 分数阶驱动系统(6)与受控的分数阶响应系统(8)之间的误差信号动态方程为 (9) 分数阶微分有三种最典型的定义,即Riemann-Liouvile定义、Grünwald-Letnikov定义和Caputo定义。由于在初始条件下,整数阶微分方程沿用了相同的形式,所以Caputo定义已经被广泛的应用于工程实践。本文也采用Caputo定义来对特定的方程进行分数阶微分。 定义1[1]对于一个连续的函数f,对其进行关于α阶次的分数阶求导定义如下 式中,Γ是伽马函数并且满足 引理1[24]如果x(t)∈Rn是微分函数的一个向量,则在时间t≥t0的任意时间里,下列关系恒成立。 式中,P∈Rn×n是一个常数对称且正定的矩阵。 定理1带有不确定参数和外部扰动的分数阶响应系统(8)和分数阶驱动系统(6)能够达到渐近同步的条件是控制器u(t)设计如下: u(t)=ueq+uc =-[(3-a+x1+y1)e1+(5-b)e2+(3-c)e3 +Δf(y1,y2,y3)+d+k4s+k5sgn(s)], 式中, ueq=-[(3-a+x1+y1)e1+(5-b)e2+(3-c)e3+Δf(y1,y2,y3)+d], uc=-k4s-k5sgn(s)。 证明:首先定义一个Lyapunov函数,形式如下 , (10) 式中,z1=e1。 根据引理1,对式(10)进行阶次为α关于时间的分数阶微分求导,得到 (11) 接着,选取第二个Lyapunov函数,形式如下 (12) 式中,z2作为虚拟输入且满足z2=e1+e2。 根据引理1,对式(12)进行阶次为α关于时间的分数阶微分求导,得到 (13) 最后,选取第三个Lyapunov函数,形式如下 (14) 定义切换函数为 s=k1e1+k2e2+k3e3, (15) 式中,选取k1=2,k2=2,k3=1 根据引理1,对式(13)进行阶次为α关于时间的分数阶微分求导,得到 DαV3≤DαV2+sDαs (16) 将u(t)代入式(16),可得DαV3<0,则定理得证。 图1 系统(6)的相轨迹Fig.1 Phase trajectory of system (6) 图2 加入参数不确定与外部扰动的系统(6)的相轨迹Fig.2 Phase trajectory of the system (6)with uncertain parameters and external disturbance 本节通过数值仿真来验证上述所设计的反演滑模控制器的有效性。 令α=0.97,a=1.2,b=2.92,c=6, k1=2,k2=2,k3=1,k4=2,k5=5, d=cos2t,Δf(y1,y2,y3)=0.2sin(2πy1)。 取初值为(x1(0),x2(0),x3(0))=(3,3,3),(y1(0),y2(0),y3(0))=(-3,-3,-5),图1表示系统(6)的相轨迹图,图2表示考虑不确定性和外部扰动的系统(6)的相轨迹图,图3代表驱动系统(6)和响应系统(8)的状态轨迹图,图4是同步误差信号e(t)的响应图,图5~6分别表示滑模平面s(t)和控制输入u(t)。可以看出,所设计的反演滑模控制器能够保证驱动系统(6)和响应系统(8)的渐近同步。 图3 受控的分数阶驱动系统与响应系统的状态轨迹Fig.3 State trajectories of the controlled fractional drive system and response system 图4 同步误差信号e1,e2,e3关于时间t的响应图Fig.4 Synchronization errors e1,e2,e3 with time t 图5 滑模平面s(t)关于时间t的响应Fig.5 Response of sliding surface s(t)with time t 图6 分数阶控制器u(t)状态响应Fig.6 Response of controller u(t)with time t 研究了带有参数不确定分数阶Genesio-Tesi混沌系统的反演滑模同步问题,基于反演控制策略设计所给系统的李雅普诺夫子函数与虚拟控制输入;然后在此基础上设计滑模面,得到了能够使带有参数不确定与外部扰动的分数阶响应系统与分数阶驱动系统渐近同步的反演滑模控制器。最后,通过仿真验证了所设计控制器的有效性。在后续的研究中,将针对分数阶Genesio-Tesi混沌系统进行自适应模糊或自适应神经网络控制与同步方面的研究。2 分数阶Genesio-Tesi混沌系统的反演滑模同步


3 仿真算例


4 结论
