时滞执行器饱和Markov跳变系统的有限时间镇定
2019-10-18张远敬
张远敬,彭 力,2
(1.江南大学物联网工程学院物联网应用技术教育部工程研究中心,江苏无锡 214122;2.无锡太湖学院江苏省物联网应用技术重点建设实验室,江苏无锡 214064)
Markov跳变系统是一类受内部离散事件作用,导致系统参数随机变化的特殊混杂系统。同时,实际的控制系统经常遭遇来自外界的随机干扰以及内部元器件的损坏,例如航天航空飞行器、通信网络、经济系统等[1-2]。基于Markov链的随机特性,衍生了很多实际场景中的应用[3-4],并且由于Markov跳变系统能够很好地描述受外部干扰等影响的实际系统,因此得到了广泛的关注与研究。例如:Senthikumar[5]研究了Markov跳变系统的稳定性分析问题。Wu[6]研究了Markov跳变系统的异步滤波问题。
在Markov跳变系统中,状态转移概率是决定系统行为的关键因素。考虑到实际过程中,系统的转移概率总是部分未知的。因此,研究具有部分未知转移概率的Markov跳变系统的相关系统理论是有必要的。到目前为止,这方面的研究已经取得了不错的进展,如Du[7]研究了其系统的稳定性,Qi[8]研究了这种系统的状态反馈控制器设计问题,Yang[9]研究了系统的鲁棒非脆弱H∞控制等。
在许多实际应用中,需要考虑系统在有限时间内的行为,系统的状态响应在有限时间内满足一定的界限。在过去的几十年里,有限时间稳定性或有界性的问题引起了越来越多的关注。随着Lyapunov函数和线性矩阵技术的发展,这方面的研究也取得了一定的成果,如Zhang[10]研究了奇异随机系统的观测器设计问题,Zhang[11]针对系统的稳定性进行了分析,Amato[12]研究了系统的动态输出反馈问题等。
另一方面,在实际的工程系统中,时间延迟和执行器饱和始终是导致系统不稳定以及性能差的主要原因,尤其出现在交通、化学反应过程以及机器人工程等领域。Zhang[13]提出 Abel引理对时延系统建立稳定性条件,Zhang[14]研究了具有时延和执行器饱和的切换线性系统的容错控制问题。近年来,在时滞和执行器饱和线性系统方面[15-16],以及相关非线性系统控制方面[17-18]都取得了一定的成果。
对于一系列特殊的复杂随机系统来说,具有时延和执行器饱和的离散Markov跳变系统能够很好地描述随机干扰因素,包括突发性的故障、外部的干扰和环境因素的突变等。然而,对于这类系统在转移概率部分未知情况下,有限时间控制的研究结果较少。考虑到上述情况,并考虑具有执行器饱和以及转移概率部分未知的离散时滞Markov跳变系统,讨论了系统在时延情况下的有限时间镇定(FTS)问题。
1 系统描述及相关引理
考虑含执行器饱和以及固定时滞的离散时间Markov跳变系统:

式中,xk∈Rn,μk∈Rm分别为系统的状态向量和控制输入向量;dk∈Rp为未知但有界的扰动信号;xk=φ(k),k=-τ,-τ+1,…,-1,0为系统的初始状态;A(rk),Ad(rk),B(rk),Bd(rk)分别为已知的具有适当维数的与模态rk相关的常数矩阵,其中rk为系统的模态,在集合S={1,2,…,N}中随离散时间取值的时齐Markov链,其状态转移概率定义为

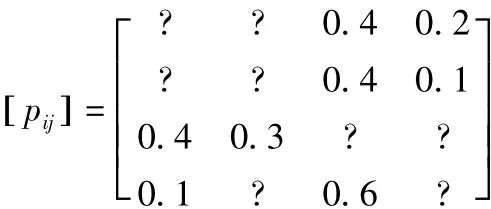
考虑转移概率部分未知的情况,转移概率∏ ={pij}中有部分元素是未知的。对于∀i∈S,集合Si=概率的元素集合和未知转移概率的元素集合。如果
在有限时间步长L>0内,未知输入扰动信号满足:

为了方便后续引用,当 rk=i时,分别用 Ai,Adi,Bi,Bd来表示 A(rk),Ad(rk),B(rk),Bd(rk)。
考虑基于状态反馈的控制器,其形式为

式中,Ki∈Rm×n为控制器增益。
下面先给出系统有限时间有界(FTB)和有限时间镇定(FTS)的相关定义。
定义1[19](有限时间有界)对于给定的有限时间步长 L,系统(1)(μk=0)是关于(c1,c2,L,d)有限时间有界的,如果满足条件(3)的扰动dk,下列条件成立:

式中,c1<c2,L为给定的正整数。
定义2[19](有限时间镇定) 设 μk=Kixk,系统(1)关于(c1,c2,L,d)有限时间镇定,如果满足条件(3)的扰动dk,均应满足条件(5)。
引理 1[20]给定两个反馈矩阵 Ki,Fi∈Rm×n,对于 x∈Rn,如果 x∈ψ(Fi),则

引理 2[21]设 P∈Rm×m为正定对称阵,矩阵 φi∈

代入控制器(4),通过引理1对执行器饱和进行分解,得到如下闭环系统:

2 主要结论
2.1 有限时间镇定(FTS)分析
定理1 考虑离散闭环系统(8)是基于(c1,c2,L,d)有限时间镇定的,如果存在常数μ≥1,σ1,σ2>0依赖模态的正定对称矩阵Xi∈Rn×n,受限于模态的矩阵Yi∈Rm×n,正定对称矩阵 Q∈Rn×n和 Fi∈Rm×n,使得下述条件成立:
其中:
证明 构造随机Markov切换的Lyapunov函数:
则
考虑到系统(1)中含部分转移概率未知的情况,根据转移概率矩阵的相关性质,可以得到如下条件:
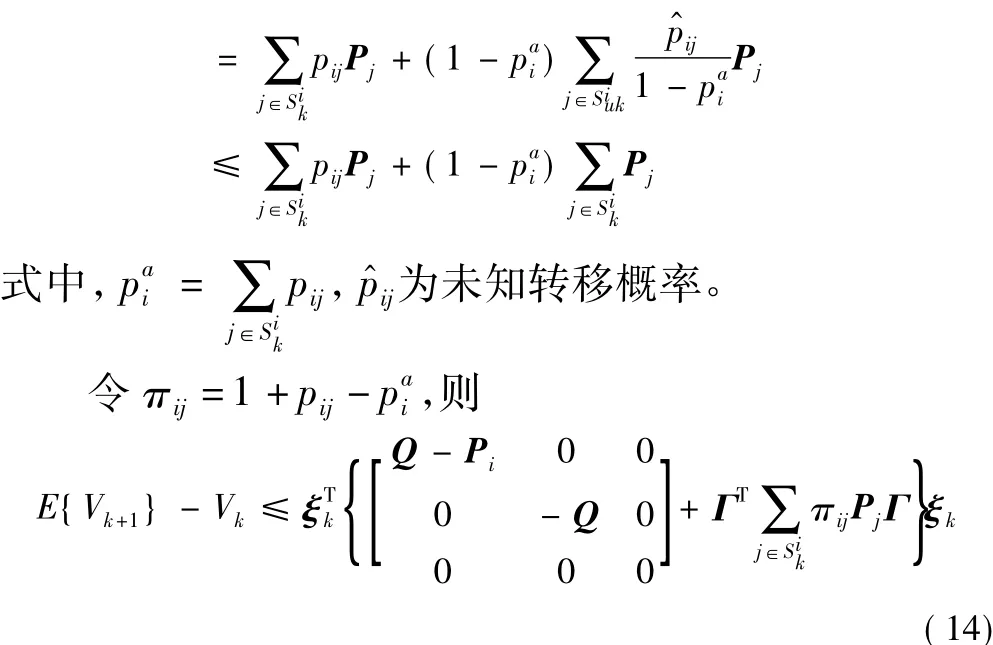
假设:

根据不等式(15),可得如下结果:
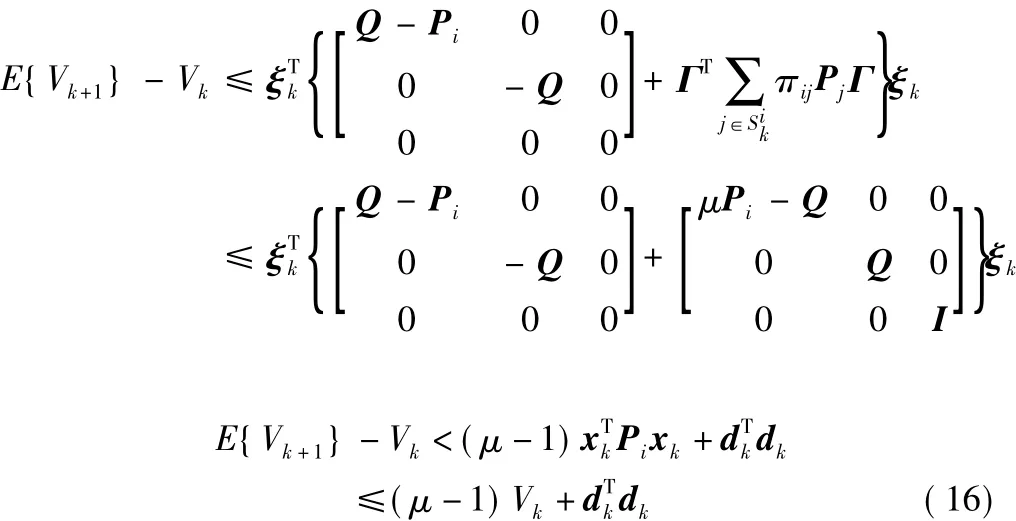
即

通过矩阵递推法,可知:

考虑任意的 k∈{1,2,…,L}和条件(3),下列不等式成立:

由定义1,进一步可得

式中,σP=σmax(Pi),σQ=σmax(Q),固定时滞满足0<τ≤d2。
将不等式(19)代入式(18),可推导出:

另外,对于任意的i∈S,有

式中,σp=σmin(Pi)。
根据条件(20)和条件(21),有

对条件(12)运用舒尔补引理,并根据条件(10)和条件(11)可得:
由(22)可推导出:

将不等式(23)代入上述不等式中,可得

因此,系统状态响应是有限时间镇定的。当状态向量xk满足条件(13),保证了反馈控制作用在线性的有界区域。
证毕。
注记1:下面将证明不等式(15)与条件(9)等价。
首先,令 Ai,v=Ai+BiUvKi+BiU-vFi,应用引理2,将式(14)化简为

由此,将不等式(15)进行展开,可得

对于∀v∈{1,2,…,2m}恒成立。
将式(24)两边同时左乘,右乘diag{P-1i,I,I},并取Xi=P-1i,Yi=KiXi,迭代运算即可得证条件(9)。
2.2 状态反馈控制器设计
当μ确定时,不等式(9),式(13)是线性矩阵不等式,可通过LMIs进行求解。将FTS控制器的设计问题转化为下述优化问题:
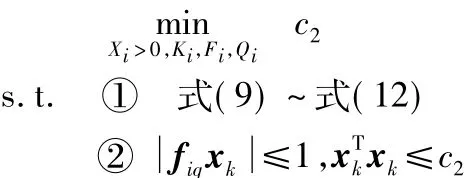
式中,fiq为Fi的第q行。
下面将上述优化问题转化为LMIs问题。
令Vi=XTiQXi,Hi=FiXi,并确定 μ 的值,将不等式(9)、式(12)转化为关于 Hi,Xi,Yi,Vi的线性矩阵不等式。

应用Schur补引理,可得到
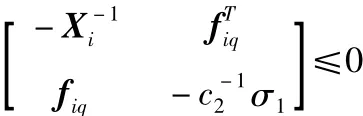
上述不等式同时左乘,右乘diag{Xi,I},可得

式中,hiq为Hi的第q行。
当σ1为固定值时,不等式(25)为线性矩阵不等式。
综上所述,通过确定 μ,c1,σ1的值,可得到带LMIs约束的优化问题:
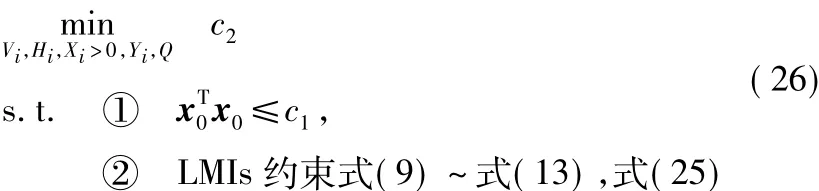
注记2:考虑上述优化问题有可行解,系统为有限时间镇定,其控制器为Ki=YiX-1i,且c2越大,有限时间镇定的可控边界范围越大。
3 数值示例
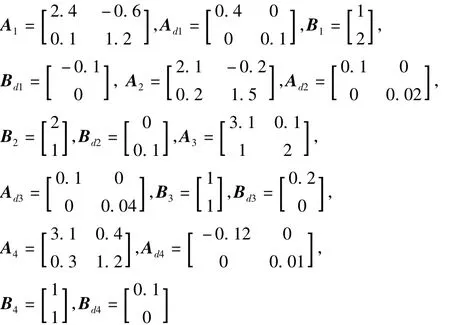
考虑离散Markov跳变系统(8)具有两个模态,参数为
转移概率矩阵如下:
令 c1=8,σ1=0.01,T=50,μ =1。
通过求解LMIs约束的优化问题(26)可得(c2)min=17.042,对应的FTS控制器为图3 xTkxk轨迹
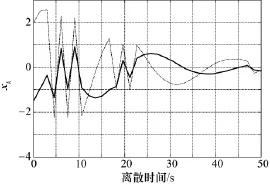
图2 状态轨迹

从图1~图3可知所求得的状态反馈控制器K1、K2使得初始状态为xT0=[-1.5 2]的系统,在反馈控制器的作用下,实现了有限时间镇定。
4 结束语
本文研究了含未知但有界扰动,部分转移概率未知和执行器饱和的时滞Markov跳变系统的有界时间稳定性问题,推导了系统有界时间镇定的充分条件,并通过将优化问题转化为线性矩阵不等式的方法,求解了相应状态反馈控制器的增益。仿真示例有效表明了该方法设计的反馈控制器能在满足既定条件下,实现系统的有限时间稳定的指标。
