远光灯智能控制算法研究
2019-10-17张瑞
张瑞
摘 要:远光灯滥用是夜间行车的重要安全隐患,尤其在直道会车时,问题尤为突出。文章拟通过开发一种基于红外测距激光阵的远光灯控制系统,实现远光灯的主动预防控制,从根源上消除远光灯滥用现象带来的安全隐患。
关键词:远光灯;路沿光阵;目标光阵;主动控制
1 研究思路
首先,在试验车尾设置一组红外测距激光,通过在竖直平面上发射的8束激光实现道路宽度测定;其次,在试验车头引擎盖中上方设置第二组红外测距激光,朝车辆前方水平发射40条激光束进行前方目标测距,并结合第一组激光装置实现前方目标探测范围界定;再次,基于模糊识别原理设计了前方目标轮廓检测算法,并根据前方目标与试验车第二组激光束的相对位移实现前方目标的自动识别;最后,根据前方车辆运动状态及与试验车的相对距离,进行夜间会车安全性评估,实现试验车远光灯主动预防控制。
2 基于路沿光阵的道路宽度检测算法
由于人行道与车道之间存在高度差,为探测车辆两侧的邻近车道数并确定监测范围,在车辆尾端中间设置分别向左和向右各4束激光形成路沿光阵来判断车辆的邻近车道数,由于本文着重研究直道会车情况,进而可确定道路宽度。激光打到人行道和打到车道上不同,在光线竖直偏向角一定的情况下,可通过激光实测数据和几何关系推测邻近车道数[1-2]。
设车尾红外设备的初始高度(距地面的距离)为a0。在未打到人行道的光线中,相邻光线投射地面的间隔距离分别为A,B,C,且需保证光线的偏转角度为定值[3]。若竖直偏转角过大,则不能检测邻近车道;若竖直偏转角过小,则多束激光可能集中在一个车道。设各光线之间的夹角分别为α,β,γ,如图1所示。
图1 路沿激光监测平面参数示意
根据道路规范,车道宽度多为3.5 m,故车辆中心线距旁边车道中间线的距离均为3.5 m,即A=B=C=3.5 m ,且a0=1。利用三角函数关系调整各光线的竖直偏转角度:α=arctan 3.5=74.1°,α+β=arctan7=81.9°,α+β+γ=arctan10.5=84.6°,以此使每束激光最大限度地投射在邻近道路中央。
路沿光阵的斜向距离矩阵为M=(b0 c0 d0),与M对应的斜向角度矩阵为:
竖向矩阵Q=(a0 a0 a0) ,则判断矩阵P=M×N-Q。若P在一定范围内,则判定有效,从而实现道路宽度的检测。
3 基于模糊数学的运动车辆判定
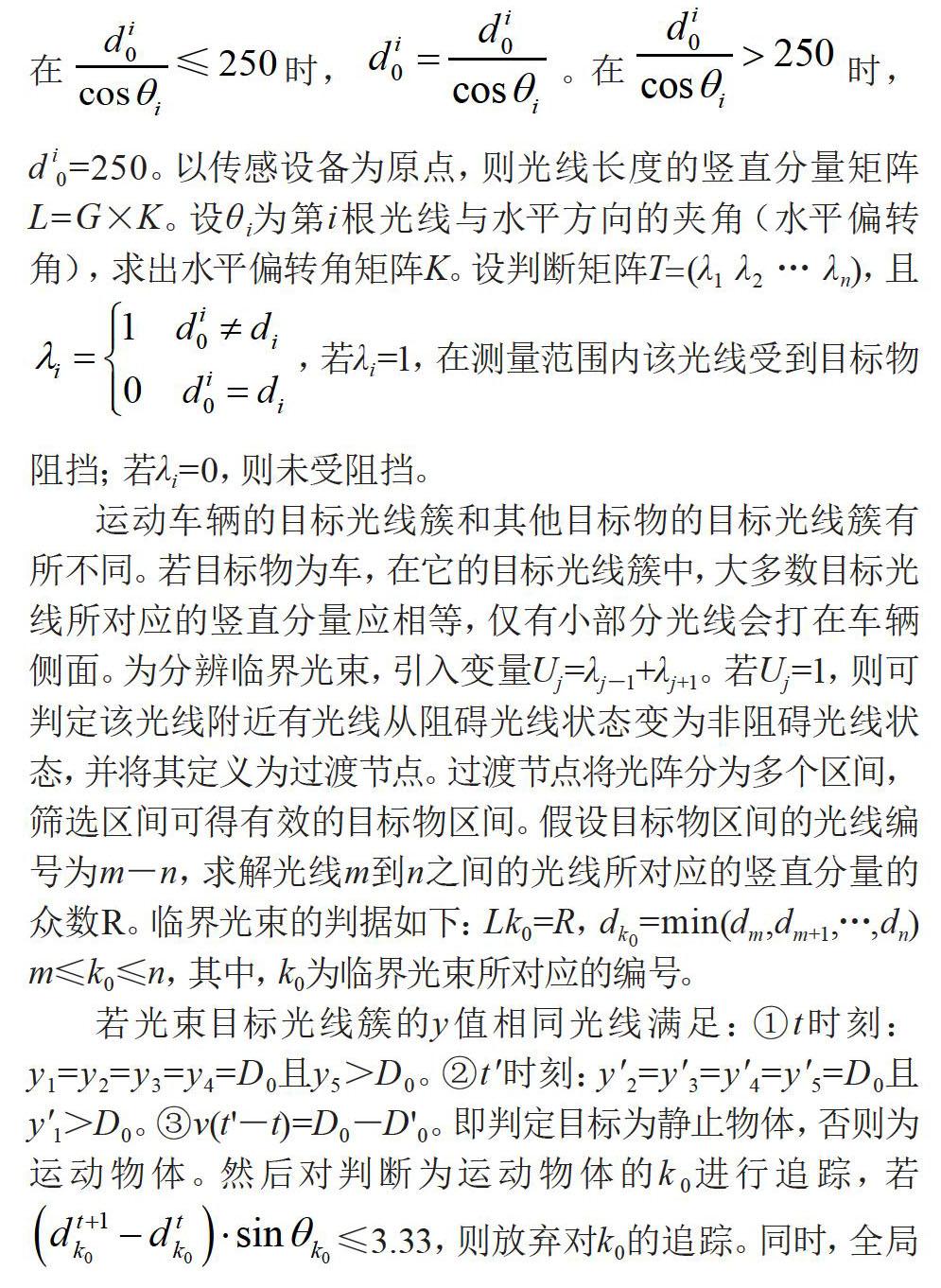
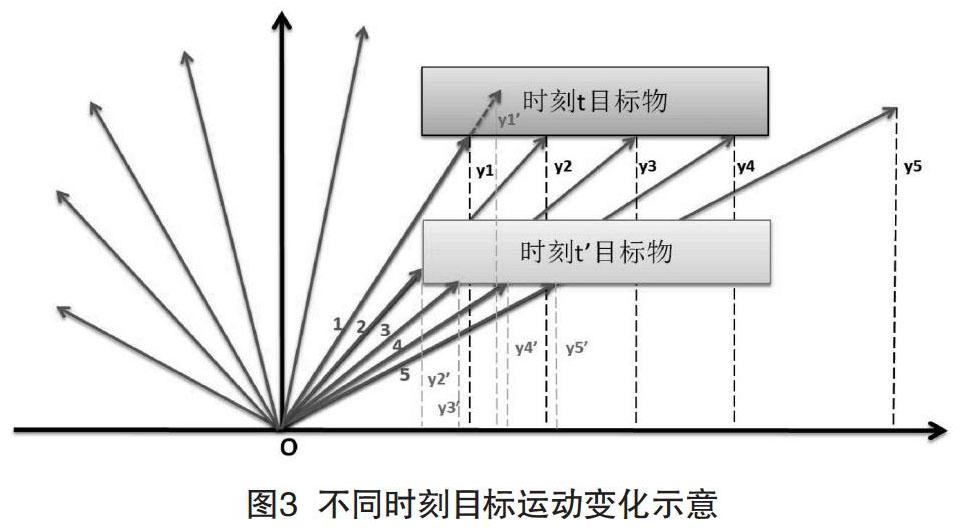
本文仅涉及在150~250 m的范围内目标物是否为运动车辆的判断,根据前文所得的车辆两侧的道路宽度,通过计算可得目标光阵的检测范围,如图2所示。a,b分别为车辆两侧的道路宽度,θ1,θ2为预先设置的光线偏角。由三角函数可求得OA和OD的实际长度,进而确定出两个探测范围边界点。由于本文研究直道会车情况,另根据道路安全法规定的远光灯使用最短距离,加之,预设红外光线長度为250 m。车头一点发射的光线在车道上形成探测区域,附加A,D两点的约束,最终可得目标光阵的检测范围为图2中的不规则多边形OABCD。当目标进入试验车的目标光阵的检测范围内,其运动变化如图3所示。在t时刻,y1=y2=y3=y4=D0且y5>D0;在t'时刻,y'2=y'3=y'4=y'5=D0且y'1>D0。设试验车的速度为v,若v(t'-t)=D0-D'0,说明目标静止,否则为运动物体。当目标为运动物体,且临界光束有相应变化规律时,可判断目标为运动车辆,随后对试验车作出提醒并切换为近光灯。
3.1 目标光阵的布置
为判断目标物是否是运动车辆,设置目标光阵于车辆前方。目标光阵由40根光线组成,每条光线之间的夹角为0.1°。光束最远辐射距离为250 m,辐射宽度为14 m,光阵发射周期为50 ms。两车在直道相会时,对向车辆将进入试验车辆的目标光阵中。根据前文所得的车辆所在车道与确定边界范围,车辆前方的部分目标光线将被目标物阻挡。为判断目标物的类别,定义临界光束为在目标光线簇中激光测量距离最小且没有打在目标物侧面的光线。利用目标光阵中的临界光束对目标物的轮廓进行刻画,进而判断此目标物是否为车辆。若为车辆,且位于距离试验车150~200 m的范围内,系统将作出切换远光灯为近光灯的判断。
目标光阵中一旦有车辆进入,就会有多条光线受阻,随着车辆不断靠近,部分受阻光线将不受阻。通过追踪目标光束中的临界光束,对目标物进行分类。即在对向车辆进入目标光阵、找到临界光束、逐渐偏离临界光束的过程中,来实现目标物的分类。由于激光发射周期为50 ms,按照两车相对速度为最大值计算,即240 km/h,则在单个周期内,两车的相对运动距离为3.33 m,故边缘阻碍光线可以捕捉到侧面长度大于等于3.33 m的目标物。
图2 目标光阵的检测范围示意
图3 不同时刻目标运动变化示意
3.2 临界光束的识别与运动车辆检测
目标物会阻碍多条连续的光线,根据描述的各条光线目标状态,可找出目标光线簇。在同一水平面上,将光线从左至右编号为1,2,3…,40,得编号矩阵N=(1 2 … 40)。以单向3车道为例,试验车位于中间车道,邻近车道判定结果为左右各1车道,则目标光阵仅对这两个车道之间的范围进行探测[4]。
设每条光线的理论到达距离为F,实测距离为G,则F=(d10 d20 … dn0),G=(d1 d2 … dn),若di>di0,则di=di0。其中,在时,。在时,di0=250。以传感设备为原点,则光线长度的竖直分量矩阵L=G×K。设θi为第i根光线与水平方向的夹角(水平偏转角),求出水平偏转角矩阵K。设判断矩阵T=(λ1 λ2 … λn),且,若λi=1,在测量范围内该光线受到目标物阻挡;若λi=0,则未受阻挡。
運动车辆的目标光线簇和其他目标物的目标光线簇有所不同。若目标物为车,在它的目标光线簇中,大多数目标光线所对应的竖直分量应相等,仅有小部分光线会打在车辆侧面。为分辨临界光束,引入变量Uj=λj-1+λj+1。若Uj=1,则可判定该光线附近有光线从阻碍光线状态变为非阻碍光线状态,并将其定义为过渡节点。过渡节点将光阵分为多个区间,筛选区间可得有效的目标物区间。假设目标物区间的光线编号为m-n,求解光线m到n之间的光线所对应的竖直分量的众数R。临界光束的判据如下:Lk0=R,dk0=min(dm,dm+1,…,dn) m≤k0≤n,其中,k0为临界光束所对应的编号。
若光束目标光线簇的y值相同光线满足:①t时刻:y1=y2=y3=y4=D0且y5>D0。②t'时刻:y'2=y'3=y'4=y'5=D0且y'1>D0。③v(t'-t)=D0-D'0。即判定目标为静止物体,否则为运动物体。然后对判断为运动物体的k0进行追踪,若≤3.33,则放弃对k0的追踪。同时,全局安全计数X的计数加1,当X≥2时,则判定有远光灯安全问题,禁用远光灯并切换为近光灯。
4 结语
本文围绕远光灯的主动预防,针对直道上的车辆,利用红外传感设备获取前方物体相对位置,通过算法判断传感捕捉范围内的前方物体是否为运动车辆,从而实现远光灯的控制。此外,远光灯的主动控制仍存在进步空间,针对不同道路线形做进一步的优化。在提倡智能与人本交通的今天,利用本系统协助控制远光灯,有利于规范交通规则的实施,减少交通事故发生率,保障夜间行车安全。
[参考文献]
[1]刘孝恩.汽车前照灯自动变光技术[J].光电技术应用,2010(2):45-47,56.
[2]张新,黄生豪,高洁.AFS自适应汽车前大灯模糊控制系统设计[J].长沙理工大学学报,2014(2):67-73.
[3]茹强,焦纪超,雷吴斌.基于摄像头识别汽车随动辅助大灯的模糊控制策略[J].汽车实用技术,2017(2):118-120.
[4]胡鹏,秦会斌.基于红外测距汽车倒车雷达预警系统设计[J].传感器与微系统,2018(7):114-116,126.
Research on intelligent control algorithms of high beam
Zhang Rui
(Chongqing Jiaotong University, Chongqing 400074, China)
Abstract:The abuse of high beam is an important hidden danger of night driving, especially in the straight road meeting. This research intends to develop a control system of high-light based on infrared ranging laser array to realize the active prevention and control of high beam, and eliminate the hidden safety hazards caused by the abuse of high beam from the root.
Key words:high beam; roadside optical array; target optical array; active control
