基于改进广义预测控制的锅炉床温研究
2019-10-15邢星
邢 星
(大唐东北电力试验研究院, 吉林 长春 130012)
0 引言
近些年,随着我国电力行业的迅速发展,循环流化床锅炉(CFB)燃烧技术已经广泛应用在火电机组中[1]。循环流化床锅炉燃烧技术具有氮氧化物排放低、可实现在燃烧过程中直接脱硫、燃料适应性广、燃烧效率高和负荷调节范围大等优势,已成为当前煤炭洁净燃烧的首选炉型[2]。该技术朝着大型化超临界、深度脱硫与脱硝、能源综合利用等方向发展。床层温度是循环流化床锅炉生产运行中的重要参数,它的控制精度直接影响机组的安全性和经济性。由于床温对象具有大惯性、大延迟等特点,其控制系统的设计是热工过程控制领域的热点问题[3]。
CFB锅炉床温反映的运行温度是在炉内密相区内的,预示着锅炉内的运行安全情形,对脱硫的效率产生了影响,所以这个运行参数非常重要。锅炉通常须要把床温控制在850℃~900℃区间,用来确保锅炉部分可以平稳的运行,并且防止氮硫化物的排放[4]。主要影响炉膛床温的原因有一次风、二次风的量和煤炭的量。反映锅炉燃烧效率的主要参数是汽压,对其影响的原因主要也是送风量和燃料量。所以床层温度控制和主汽压之间普遍含有复杂的耦合性。这类耦合性让标准的PID控制器难以实现两者之间展开有成效的节制[5]。所以,为提升CFB锅炉燃烧技术的自动化水平而进行深层次的研究具有一定的实际应用意义。
1 循环流化床锅炉床温模型
对于循环流化床锅炉燃烧系统,一次风和二次风构成了燃烧用风,一次风从炉膛下部送入,主导流化的程度,二次风从炉膛中下部送入为燃烧提供充足的氧气。因为两种风是从不同的位置进入炉膛的,所以对于各个参数的影响也会不尽相同。一次风对主汽压、床温、烟气的含氧量、炉膛负压等的影响较大,而一次风对床温的影响较二次风要强一些。所以,通常可以认为,在控制燃烧系统中,用一次风量对床温、主汽压力进行调节,而用二次风量来对烟气含氧量进行调节。
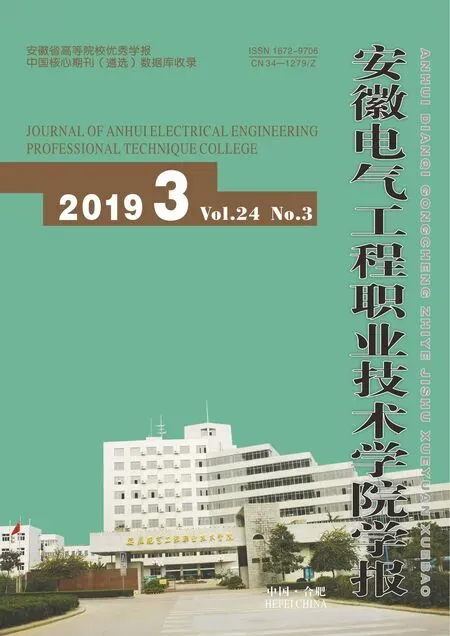
锅炉负荷是燃烧系统中又一个重要影响因素。系统的性能会跟随锅炉负荷的变化而发生改变。各种因素相互之间关系如表1所示。
循环流化床锅炉床温的控制主要是通过对燃料量、送风量以及循环灰量的调节来实现的[6]。整体上看,燃料量以及总送风量调节会对炉膛内的温度有直接影响;调节炉膛内温度的分布则需通过调节循环灰量来加以实现。
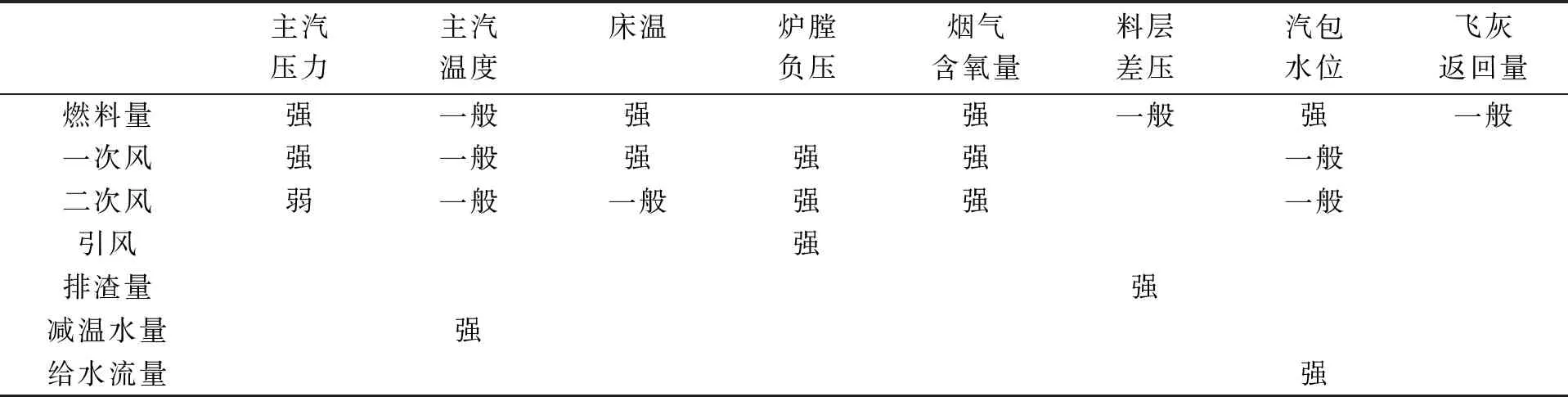
表1 CFB锅炉燃烧系统各参数关系表
大量数据表明,在燃料量阶跃产生变化的情况下,床体温度的反应特性呈现自平衡飞升的效果,如果采用燃料量控制床体温度势必要影响锅炉运行负荷。在石灰石量阶跃变化下,床温的反应是有自平衡的响应特性,若通过改变石灰石量实施对床温的控制,则要影响烟气中二氧化硫的控制。在一次风量阶跃变化下,床温表现出飞升特性同时还具有自平衡性,但在飞升的动态过程中,他们具有逆向响应特性,所以主要通过一次风量及一次风和二次风的配比的调节实施对床温的控制。各控制量与床体温度的关系以及被控量与床温的关系如图1所示。
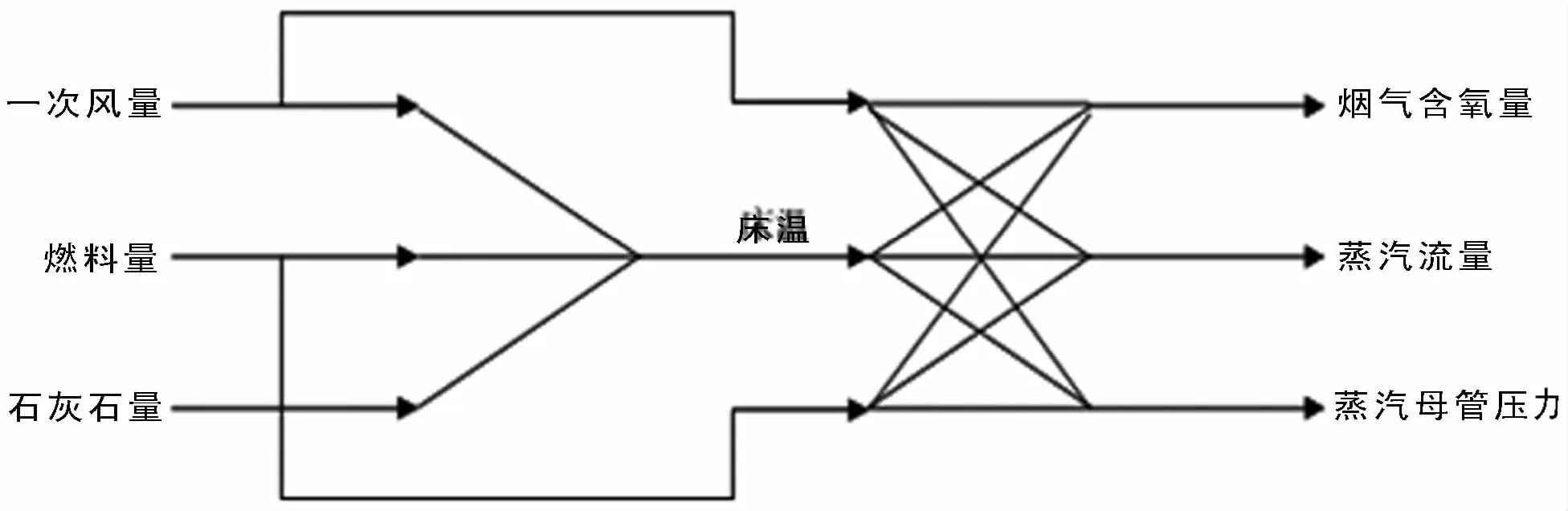
图1 床温与各控制量、被控量的关系
造成床温变化的石灰石的用量、一次风量和燃料用量三者之间的传递函数为:
θ(s)=K1Gv1θ(s)V1(s)+K2GBθ(s)B(s)+K3GLθ(s)L(s)
(1)
式中:K1、K2、K3分别为一次风量V1、燃料量B和石灰石量L的权重系数。
在确保脱硫和燃烧效率达标并且机组正常运行的前提之下,将CFB床体温度掌控在某个已知的区间。所以使用在静态平衡基础上的范围控制方法来控制床温,这样可以抵消系统中出现的耦合现象,确保锅炉可以稳定燃烧。对于已经投运的机组,进立建模的时候必须全面考虑各种产生影响的因素,无法建立准确无误的对象模型,所以使用扰动实验的方法给机组建立仿真模型来进行进一步的研究,通过MATLAB或其他建模工具结合锅炉的结构和参数、经验数据以及现场扰动实验数据可以建立床温模型为以下表达式[6]:
(2)
其中,Kv为床温对象的输出增益,Tv为床温惯性时间常数,n为床温传递函数阶次,τv为床温迟延时间常数。本文采用华北电力大学马强建立的100%负荷下的床温模型的表达式为:
(3)
其中GTv1表示一次风-床温模型。
2 改进的广义预测控制算法研究
广义预测控制算法(GPC)是在自适应控制算法技术的基础上提出来的一种全新的预测算法,GPC算法不仅仅具有预测控制算法的在线校正、模型适应性广等优点,还具有在线辨识以及自适应的控制算法可以应用于随机系统等方面的优点,但传统的GPC算法计算量很大,需要对仿真模型中的参数进行识别辨认[7],所以本文提出应用阶梯式广义预测控制直接算法。
控制器参考数值的选择影响着被控对象的动态过程,GPC作为一种基于参考数值化的算法采取了反馈校正的控制计策和多阶段预测还有滚动优化,系统适应性和控制性能获得很大程度上的提升。可是,这类的多步骤预测比之前的单步骤预测相比较多了两种参考数值。这两种参考数值为预测量时域n和控制量时域m。在这两个参考数值之外,如何算取控制设计加权量常数λ以及柔化系数α也将对控制设计器的性能产生重大影响。故怎样对这四个参数m、n、λ、α的取值尤为重要[8]。
本节主要通过仿真实验来研究前面提到的各种参数对系统的影响,主要包含广义预测控制直接算法仿真和改进的广义预测控制算法仿真两个部分,其中仿真中用到的模型如下:
(4)
取数值,p=n=6,m=2,λ=0.8,α=0.3,λ1=1,RLS参数初值:gn-1=1,f(t+n)=1,P0=105I,其余为零;w(t)为[-0.2,0.2]均匀分布的白噪声。
(1)采用广义预测的直接算法进行MATLAB仿真得出如下所示仿真图像
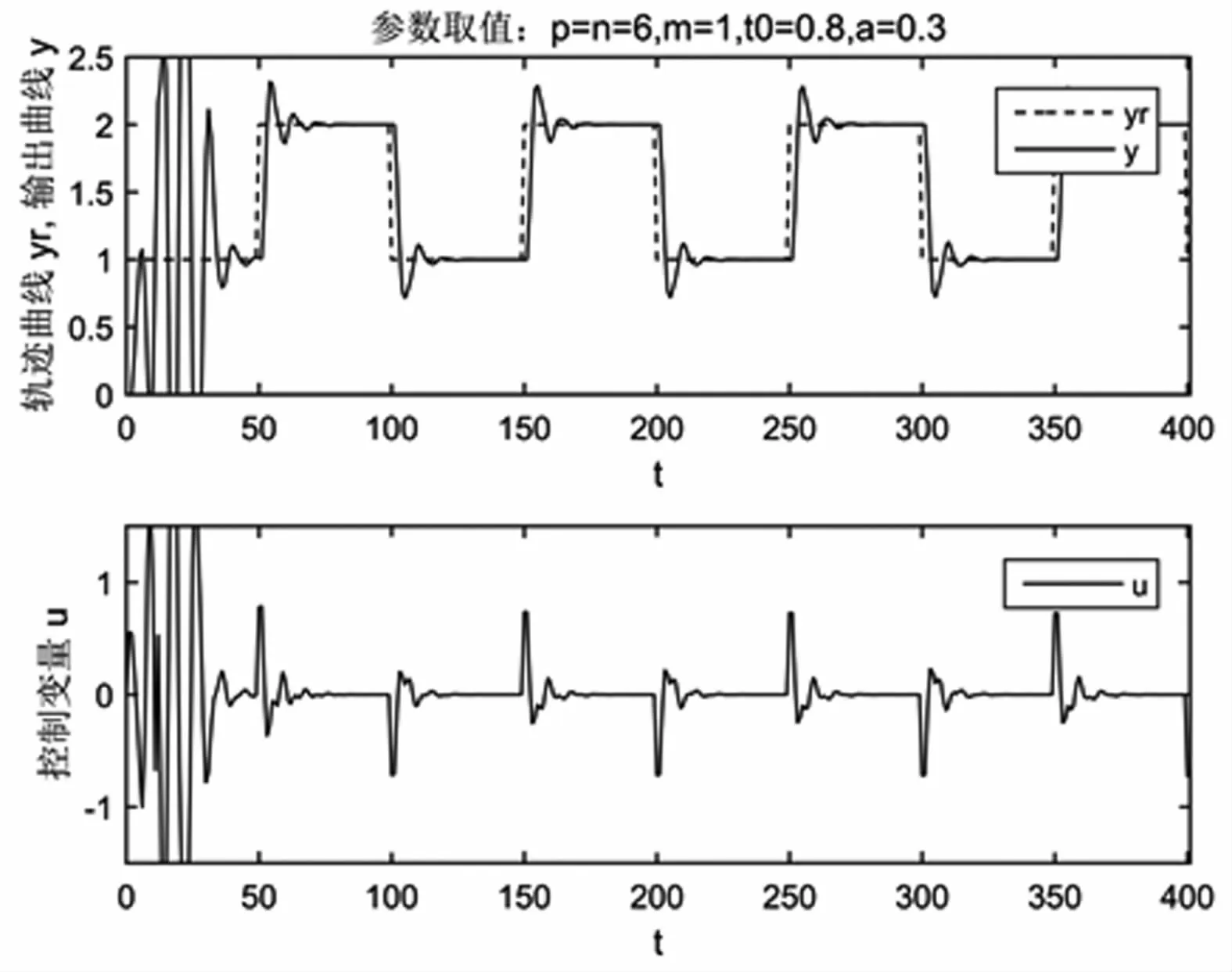
图2 m=1时,广义预测控制直接算法仿真结果
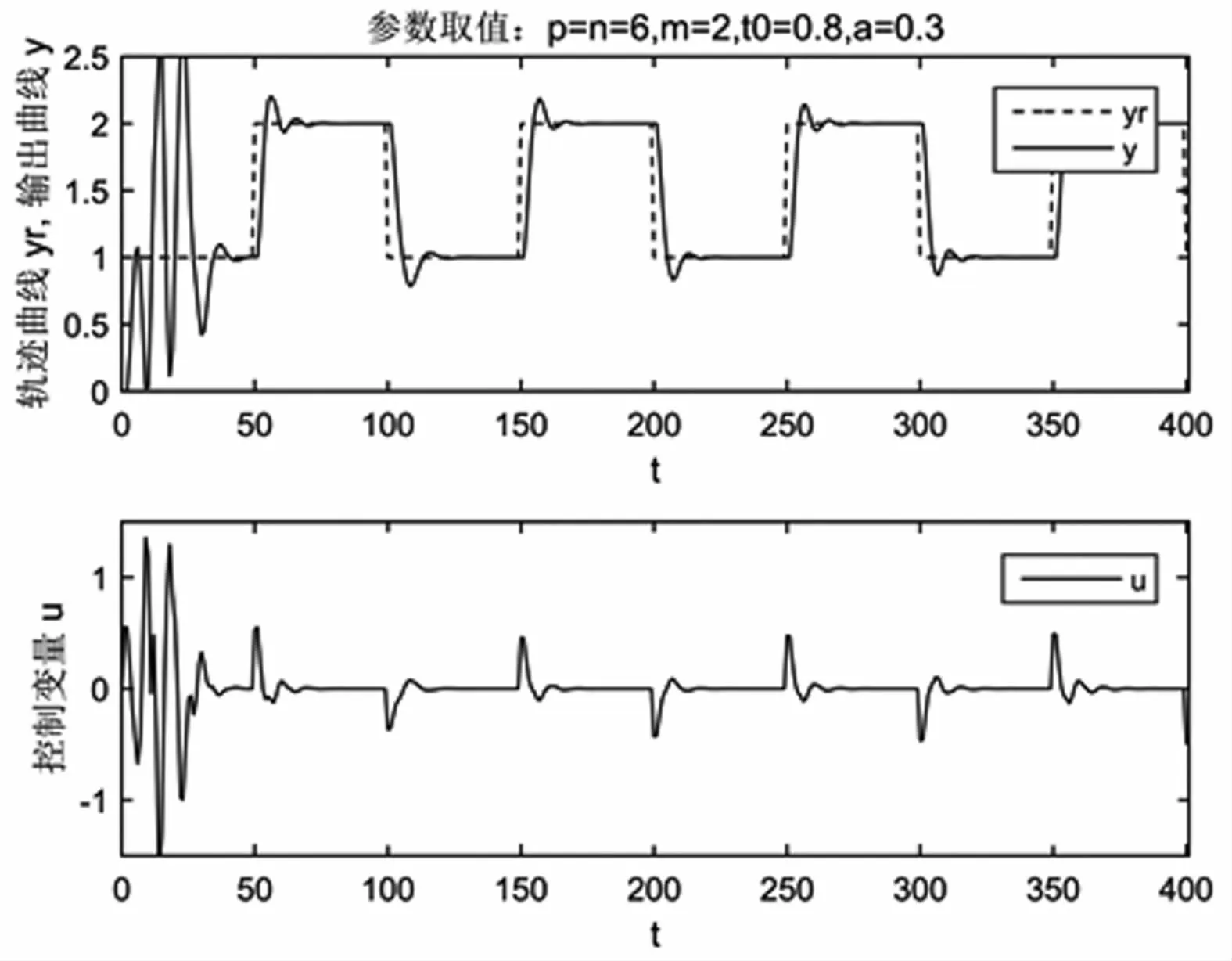
图3 m=2时,广义预测控制直接算法仿真结果
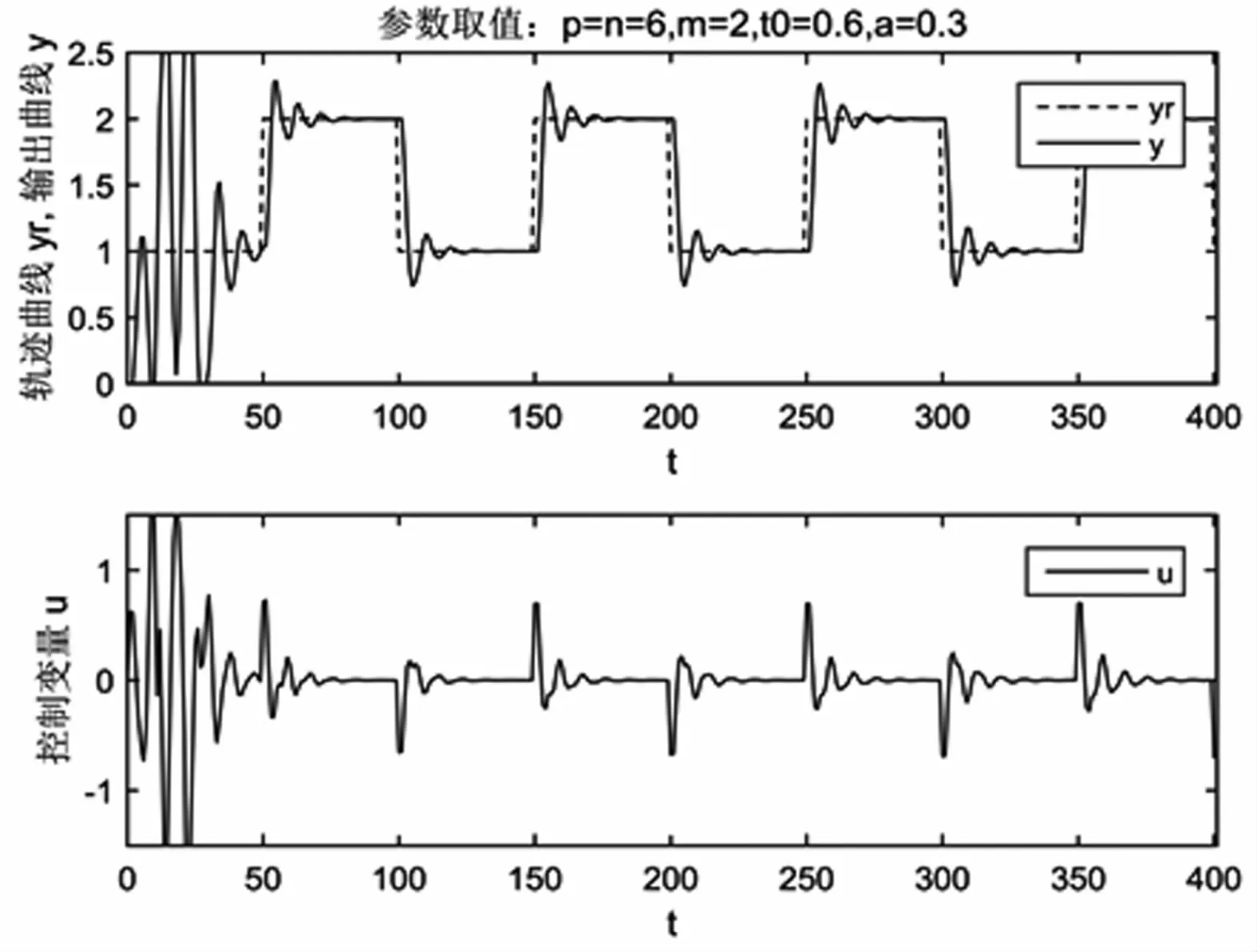
图4 t0=0.6时,改变广义预测控制直接算法仿真结果
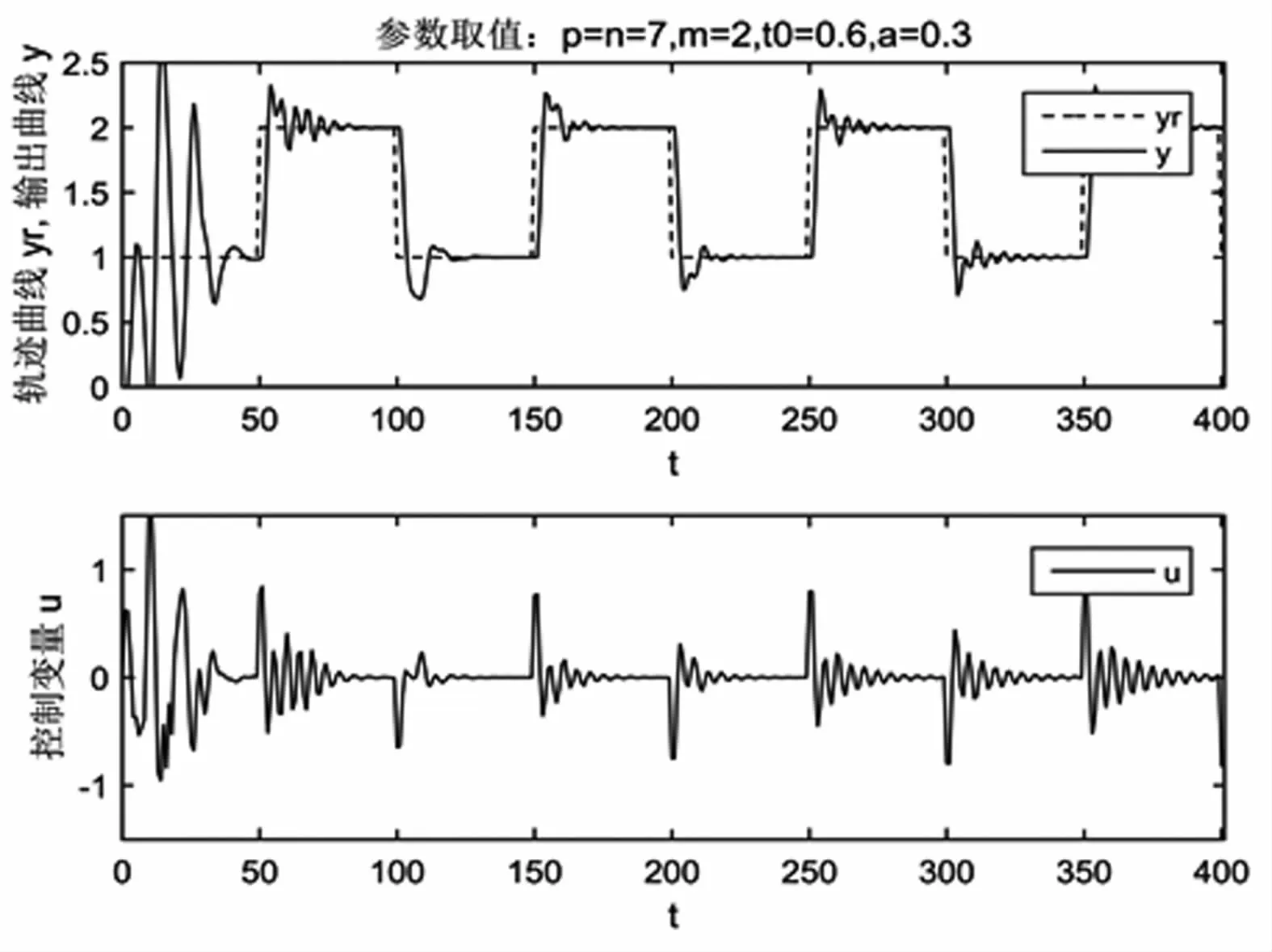
图5 p=n=7时,广义预测控制算法仿真结果
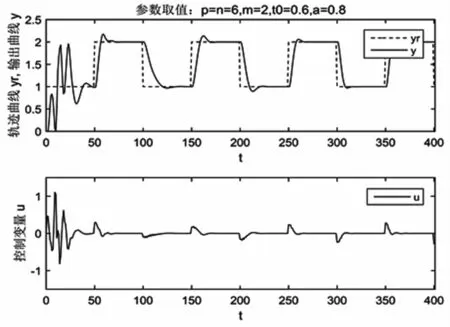
图6 α=0.8时,广义预测控制算法仿真结果
由图2与图3比较知,当控制长度m的取值发生变化时,输出曲线的跟踪性能得到提升,即系统的快速性得以提高,但最终出现了振荡和超调。由图3与图4比较知,当控制加权系数λ的取值发生变化时,控制变量u的输出峰值变大,引起输出有较大的超调,系统稳定性变差。对比图4和图5可以看出,当预测长度和控制时域变大时,控制变量u的输出频率增加,导致系统的输出变得震荡。比较图4和图6可知,当柔化系数α由0.3变为0.8时,增加了系统的稳定性,降低了系统的快速性。
(2)阶梯式广义预测控制直接算法仿真
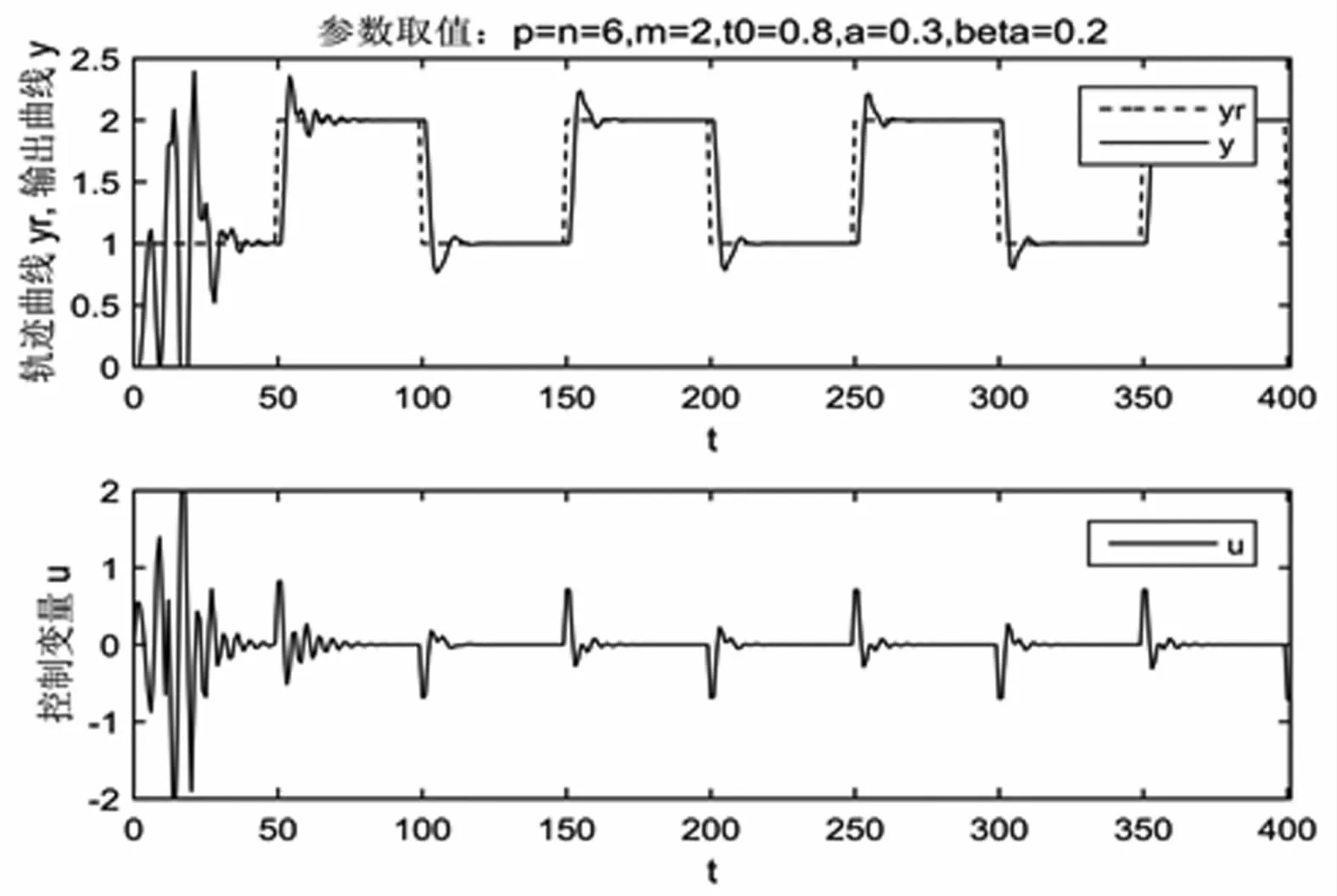
图7 β=0.2时,阶梯式广义预测控制直接算法仿真结果
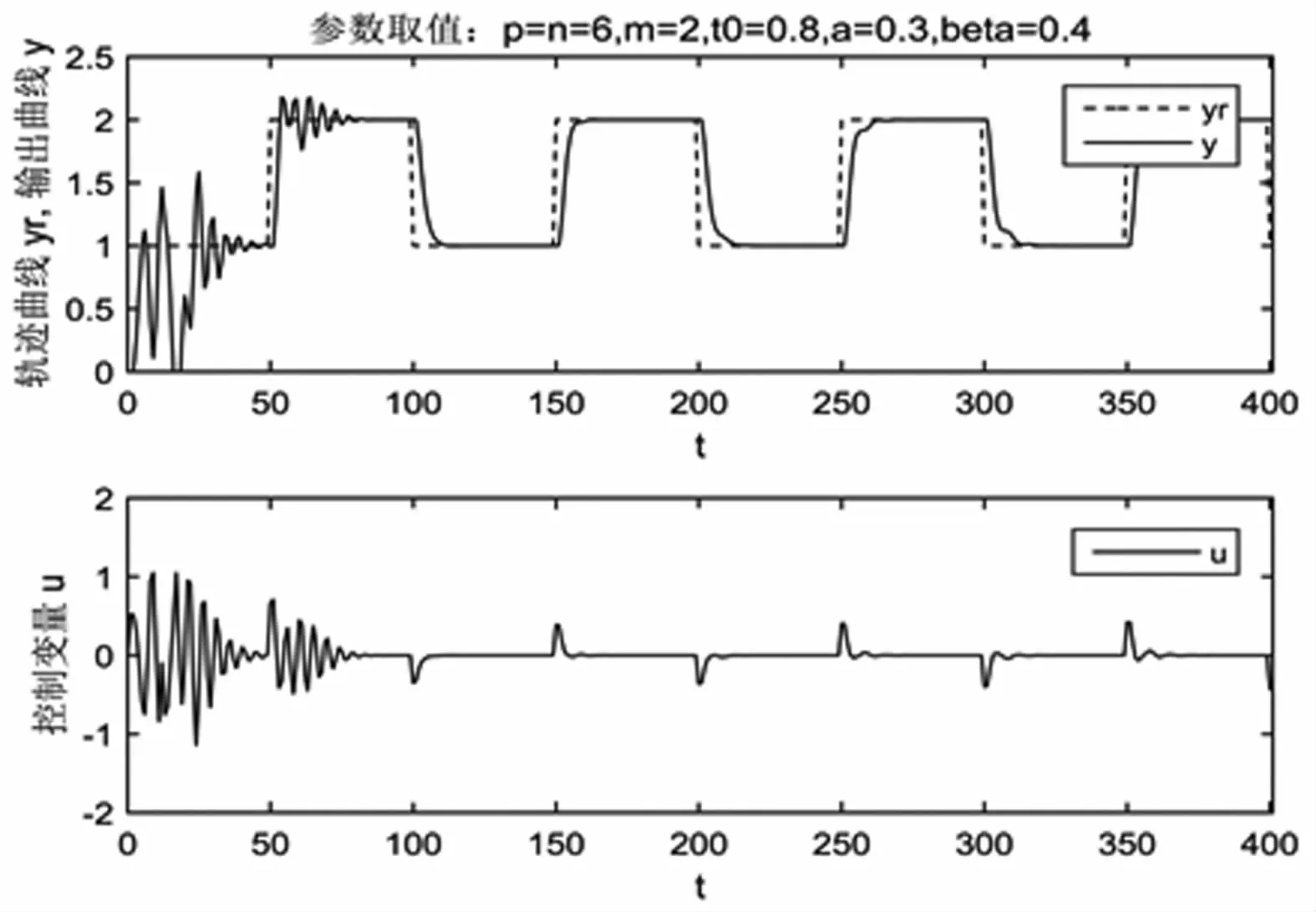
图8 β=0.4时,阶梯式广义预测控制直接算法仿真结果
通过分析可知,阶梯因子β的加入可以让控制变量u的输出峰值明显减小,可以通过对比图3和图7得出此结论,除此之外还使系统的快速性和稳定性得到了增强。当阶梯因子继续增大时,会发现输出曲线y在第一周期内会出现较大的震荡,这种现象可能是由于床温模型中存在较大的延时导致的。为了克服延迟产生的震荡,本文提出了利用Smith预估的方法对阶梯式广义预测控制直接算法进行改进。
通过对比仿真实验(一)、(二)可知,阶梯式广义预测控制直接算法中的控制变量u的输出峰值要比广义预测控制直接算法中的控制变量u的输出峰值要小很多,而且前者的控制效果整体而言要比后者更加稳定。
3 基于Smith预估控制的改进算法
针对温度对象控制中出现的大延时、大迟滞的控制难题,本文引入Smith预估控制算法得到最终的Smith阶梯式广义预测控制直接算法(YSGPC),来抵消延时给系统带来的干扰,提高对迟滞系统的控制精度。控制结构如图9所示:
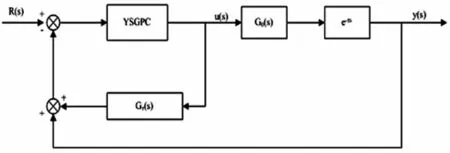
图9 带Smith补偿的预测YSGPC控制结构
在图9中可以显示出,在系统运行中不含有时间延迟的时候,就相当于YSGPC的控制调节回路,进而当系统具有时间延迟的情况下,通过 Smith预估器来抵消延时给系统造成的干扰,然而YSGPC参数则仅仅需要根据无时间延迟的模型Gm(s)来进行整定,这样的话就可以尽可能的减少时间延迟对参数整定产生的误差。
Smith预估器上式的形式如下:
(5)
研究对象中会存在延时因子,但在Smith预估器中的延时环节是通过人工进行设计并添加的。从理论上可知,在预估模型与实际模型相符的情况下,即预估器中的τ、K、T跟研究对象中的τ、K、T这三个参数完全相同的情况下,Smith预估器能够很好地将延时给控制系统带来的影响抵消掉,提高控制系统的跟踪效果[6]。
用CARIMA模型描述含有滞后的对象:
A(z-1)y(t)=z-dB(z-1)u(t-1)
(6)
A(z-1)=1+a1z-1+…+anaz-na
(7)
B(z-1)=b0+b1z-1+…+bnaz-nb
(8)
式中z-1为后移算子,d为时滞。
对象的预测输出用两种方法计算:
从t+1到t+d时刻,用Smith预估算法来预估对象的预测输出:

(9)

从t+d+1到t+d+N时刻,用YSGPC的常规算法:
y(t+j|t)=Gj(z-1)Δu(t-j-1)+Fi(z-1)y(t)
(10)
向量形式为:

(11)
综上所述,最终的改造更新算法为将阶梯式策略和Smith算法与广义预测控制直接算法进行融合,使用MATLAB软件对改进的广义预测控制直接算法进行仿真,其中过程流线图如图10所示。
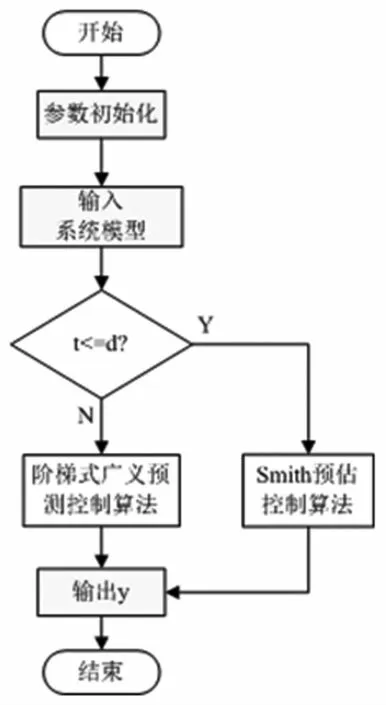
图10 MATLAB程序流程图
最终改进后的广义预测控制直接算法仿真结果如图11所示。
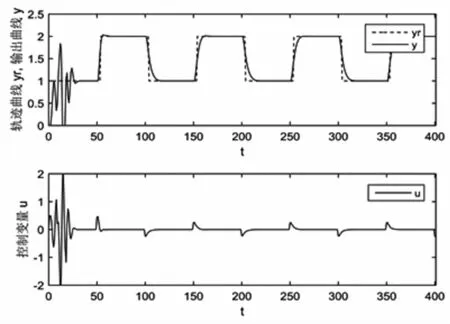
图11 最终改进的广义预测控制直接算法仿真结果
通过仿真实验可知,床温—一次风模型的控制在加入Smith预估算法后,系统的延迟得到改善,控制变量u的输出峰值进一步减小,且系统稳定无超调。
4 改进的广义预测控制在分散控制系统中的应用研究
将改进的广义预测控制算法按照图4-9所表示的广义预测控制结构表示图,编写成高级算法块(SGPC)。改进的广义预测控制算法中的各项控制参数根据MATLAB仿真结果得出的最佳值填写到算法块SGPC的属性窗口中。
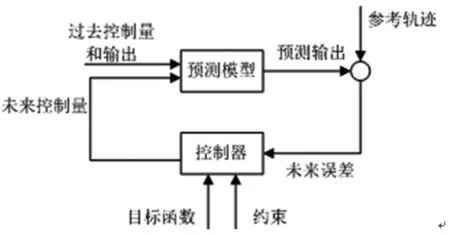
图12 广义预测控制结构图
在DCS的实时趋势浏览器中验证控制算法的有效性,图13为床温应用仿真实验结果,图表中显示的曲线1表示广义预测控制模型控制量的输出,图中的曲线2代表广义预测控制模型的输出,曲线3为床温的设定值。
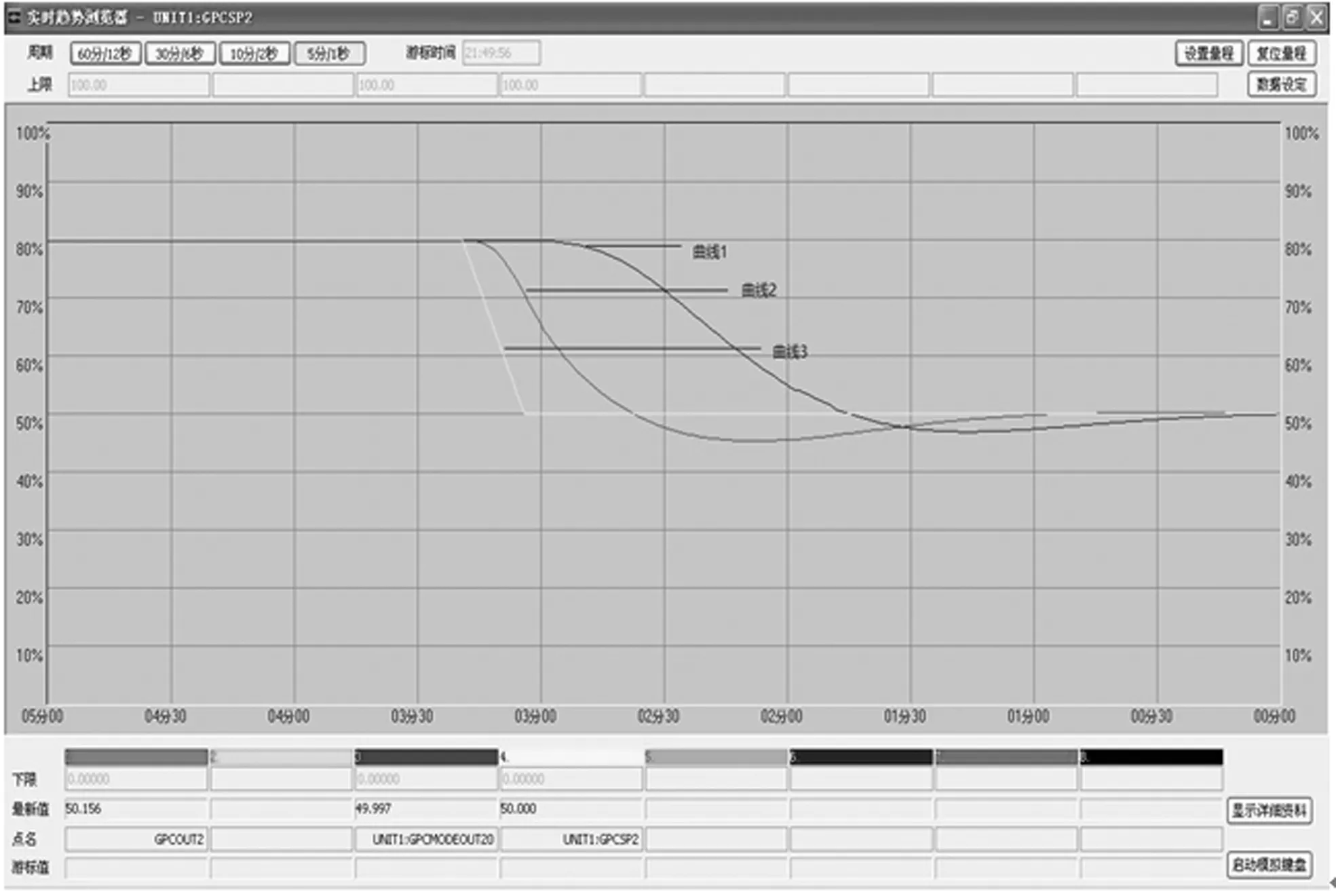
图13 广义预测控制在分散控制仿真系统中的仿真结果
同图13中显示的仿真曲线可知,如果床温设定值GPCSP2曲线3发生变化,更新后的广义预测控制算法模型的输出曲线2可以迅速跟踪给定值的变化并达到稳定状态,说明该算法块控制作用明显,可以满足控制要求。
5 结论
本文结合广义预测控制的思想,根据循环流化床锅炉的构成及其工作原理确立了床温模型,综合之前更改完善后的广义预测控制直接算法在分散集控系统的仿真机中进行了实验研究。得到了以下结论:相比较经典的广义预测控制的不足点和缺陷,对其进行更新改造,改造一是把梯度式原则用到广义预测控制的直接策略当中,控制率中矩阵的计算变为向量计算,计算量得到减小,改进二是结合Smith预估器来消除时滞带来的影响,可以更好的对延时对象进行研究。将两种改进算法进行融合后,通过MATLAB编程实现了仿真实验的研究,对算法的跟踪控制效果展开验证,并将融合算法在DCS的仿真系统中加以实现,为预测控制在床温模型控制在实际中得到运用奠定了理论基础。