基于神经网络算法的制导工具误差分离
2019-10-15袁林刘春光大连91550部队
袁林 刘春光 大连91550 部队
一、引言
飞行器精度是最重要的战术战技指标,影响精度的因素很多,其中制导工具系统误差占总误差源的80%左右。一方面可以提高惯性器件精度来提高制导精度,另一方面可以采用误差补偿技术来提高制导精度。这就需要高精度的误差分离方法。传统的误差分离方法包括:主成分估计、岭估计、正则化法、贝叶斯法等,其始终困扰于环境函数的严重病态。徐德坤等[2]利用进化策略方法分离制导工具系统误差。杨华波等[3]用机器学习算法支持向量机分离制导工具系统误差。
近来,随着深度学习的广泛研究应用,神经网络算法得到很大的发展,能得到局域最优解或全局最优解,称为万能函数拟合器[4]。本文提出利用神经网络来分离制导工具系统误差,充分利用神经网络算法的函数拟合能力,直接拟合环境函数矩阵的逆矩阵,为制导工具系统误差分离提供一种新的解决思路。
二、基于神经网络算法的制导工具系统误差分离
1.制导工具误差分离
文中的制导工具主要指平台式惯性导航系统,产生导航误差的主要误差源是陀螺仪的漂移误差和加速度表的测量误差。制导工具误差分离是在已知飞行器真实外测轨道和遥测轨道的基础上进行的,利用外测轨道和遥测轨道的差建立制导工具系统误差分离的线性模型。本文考虑速度域下的线性模型,如下:

其中ΔW为惯性系下遥外速度差数据,S为对应的环境函数矩阵,C为待估制导工具误差系数,ε为高斯白噪声。制导工具系统误差系数包括陀螺仪的9 项误差系数和6 项加速度计误差系数。文中考虑的陀螺仪产生的漂移误差为:陀螺仪零漂D0i、陀螺仪与输入轴方向加速度1 次方成正比的漂移系数D1i;陀螺仪与自转轴方向加速度1 次方成正比的漂移系数D2i。考虑加速度计沿输入轴的误差为:加速度计零漂C0i和一次方误差系数C0i。
传统方法中,可以对公式(1)进行最小二乘估计得到制导工具系统误差系数,但由于环境函数矩阵S的严重病态,使其结果往往不好。这样可以主成分估计、Bayes 估计、智能优化算法等来改善估计结果。文中拟采用神经网络算法来估计制导工具系统误差系数。
2.算法
神经网络由一系列的人工神经元堆叠而成。人工神经元使用数学函数来对生物的神经元进行建模。神经网络的训练一般采用后向传播算法。如在监督学习中,在提供大量标记样本的基础上,先进行神经网络前向传播得到输出,并与样本标签进行比对,进而不断调整神经网络参数直到某个收敛条件。
如何将神经网络模型用于制导误差分离,首先必须确定其输入层,输出层,并产生大量的数据样本。很明显这里的输入层是遥外测速度差ΔW,输出层为制导工具系统误差系数C,即神经网络可以直接从遥外速度差预测得到待估参数,这也相当于神经网络是在拟合环境函数矩阵的逆矩阵,由此有效避开环境函数病态而求逆不稳定的问题。对于某个环境函数矩阵S,可以随机产生大量的制导工具系统误差及对应的遥外速度差数据,以此得到大量带标签的数据样本。并以神经网络的预测值c 与真值c 的残差的均方误差作为损失函数,进而利用梯度下降法等方法训练该神经网络直到收敛条件。流程如图1 所示。

图1 算法流程图
3.算例与分析
根据上述基于神经网络的制导工具系统误差分离算法,设计了一个包含一个隐含层的神经网络,各层神经元数分别为:输入层为450 个神经元,对应450 维遥外速度差数据,隐含层100 个神经元,输出层为15 个神经元,对应15 项待估制导工具误差系数。并对该15 项系数进行去量纲和归一化处理。文中共生成了614400 组均值为0,方差为1 的正态分布制导工具系统误差系数,并生成对应的遥外速度差。且以8:2 比例分配训练样本和测试样本。神经网络激活函数为双曲正切函数tanh,损失函数为神经网络输出与标签(即制导工具误差系数真值)之差的均方误差。并使用自适应矩估计方法来优化神经网络参数。
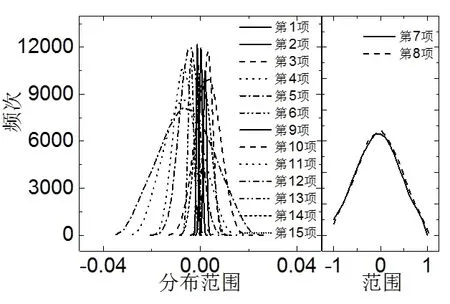
图2 制导工具误差预测值与真值之差直方图
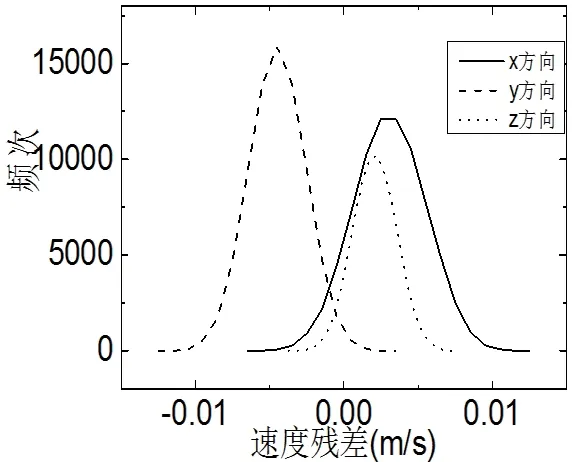
图3 三个方向的速度残差
设置批尺寸为320,经过约5000 个历元的训练,均方误差随历元快速收敛,变小到5000 历元处的0.026,测试数据均方误差也基本同步变小为0.025。图2 显示了测试数据集的神经网络输出c 和标签值c 的残差统计。可以看出15 项制导工具系统误差中的13 项与真值误差小于0.04,实现了制导误差系数的有效分离。而第7、8 项拟合较差,其预测值始终保持在0 附近。其可能的原因是这两项误差系数在该环境函数下对总的遥外速度差贡献较小,导致损失函数对这两项系数的梯度较小,进而导致神经网络的梯度下降算法难以将其优化到真值附近。根据测试集的输出c,将其乘以真实环境函数矩阵,即可反算得到遥外速度差,其与对应的测试集特征ΔW作差,并统计得到三个方向的速度残差最大值分布直方图如图3 所示。可以看出三个方向的速度残差均小于0.015 m/s。由此可以看出第7、8 项在该环境函数下对总遥外速度差的贡献较小的事实。且可以得到,虽然神经网络没有采用自编码网络,但神经网络仍完美拟合重现了输入遥外速度差。即该神经网络有效拟合了环境函数矩阵的逆矩阵,从而有效避免了对病态的直接求逆。
三、结论
文中提出并设计包含一个隐含层的神经网络来分离制导工具系统误差,算例结果表明,神经网络算法能精确估计出15 项制导误差系数中的13 项。可以认为该方法在一定程度上有效避免了环境函数严重病态问题,为制导工具系统误差分离提供了一种新思路。
