自动控制在地铁自动驾驶控制系统中的应用
2019-10-14张琪琪程晓旭高文秀李淼张路曹轩铭
张琪琪 程晓旭 高文秀 李淼 张路 曹轩铭
摘 要:随着时代的不断发展,地铁全自动驾驶技术成为地铁系统中的发展趋势,对于地铁全自动驾驶技术,同时自动控制技术的质量性能决定了地铁自动驾驶控制中的精度,同时对地铁全自动驾驶技术的安全性、高效性及舒适性都有非常重要的意义。本文对自动控制及其基本原理以及其在地铁全自动驾驶技术的应用来进行研究。
关键词:地铁全自动驾驶;自动控制技术;控制精度
DOI:10.16640/j.cnki.37-1222/t.2019.04.121
0 前言
随着科技的不断进步,轨道交通技术也在快速发展,同时也引领着全自动驾驶技术的快速发展,目前已经越趋成熟。目前,许多发达国家的城市轨道交通都实现了全自动驾驶,包括国内香港的迪士尼线、上海地铁10 号线以及北京地铁机场线。地铁全自动驾驶是指在无人参与的情况下,列车能够自主运行。车辆在全自动化驾驶过程中,需要系统能够实现高效率、高密度的要求,因此列车的自动控制系统是必不可少的。自动控制系统(ATC,即Automatic Train Control)包括三个子系统:列车超速防护子系统(ATP :Automatic Train Protection) 、列车自动驾驶子系统(ATO :Automatic Train Operation) 、列车自动监控子系统(ATS :Automatic Train Supervision)。
ATO系统,即列车自动驾驶子系统,主要实现“地对车控制”,模拟最佳司机驾驶, 实现正常情况下高质量的自动驾驶,使列车高效率运行,同时也提升列车运行过程中的舒适度,节省能源。ATS子系统是ATC的核心功能,可自动或由人工控制进路,进行行车调度指挥,并向行车调度员和外部系统提供信息,其可以实现对列车运行的监督和控制,辅助行车调度人员对全线列车运行进行管理。ATP子系统则是根据地面传递的信息计算出列车在运行过程中所允许的安全速度,进而保证列车间隔,从而实现超速防护。
为了提高全自动驾驶地铁的整体性能,自动控制技术是非常有必要的,而自动控制的检测性能对列车行驶的最优性能也非常重要[1]。
1 自动控制及其基本原理
自动控制,是利用控制装置使被控对象在没有人直接参与的情况下按照预定的规律运行和变化。全自动无人地铁驾驶即地铁不依赖人员的控制条件下,能够自主的行驶以及确定车辆各种信息,为了能够准确的完成全自动驾驶,具有良好的自动控制系统控制质量是非常有必要的。
控制系统分为开环控制系统、闭环控制系统以及复合控制系统,开环控制系统是单向传递的,系统结构比较简单,同时成本较低,但被控量的精度只能取决于控制器及被控对象参数的稳定性,无法进行自修正。闭环系统系统可以自动纠正干扰或内部特性参数变化引起的变动,系统的控制精度较高,但是负反馈需要引入合适的参数匹配[2]。
地铁全自动驾驶控制系统中,利用自动控制系统的自适应控制特性,通过监控系统自动测量系统状态,由中央控制单元自动辨识、分析测量参数,再通过预先设定状态去判断并自动改变控制器结构与参数,使其适应环境变化,并始终维持最优的性能指标。
2 自动控制在全自动驾驶地铁控制系统中的应用
2.1 車速自动驾驶控制
在列车行驶过程中,综合列车的运行计划、列车的实时运行速度、实时运行线路以及运行的目标速度等信息,通过自动驾驶系统车载设备实时计算出列车要达到目标车速时,所需要的牵引力或制动力的大小,然后通过总控制单元,根据列车的需求对列车牵引系统或控制系统的执行器发出指令,进而完成列车的加速和减速作业。
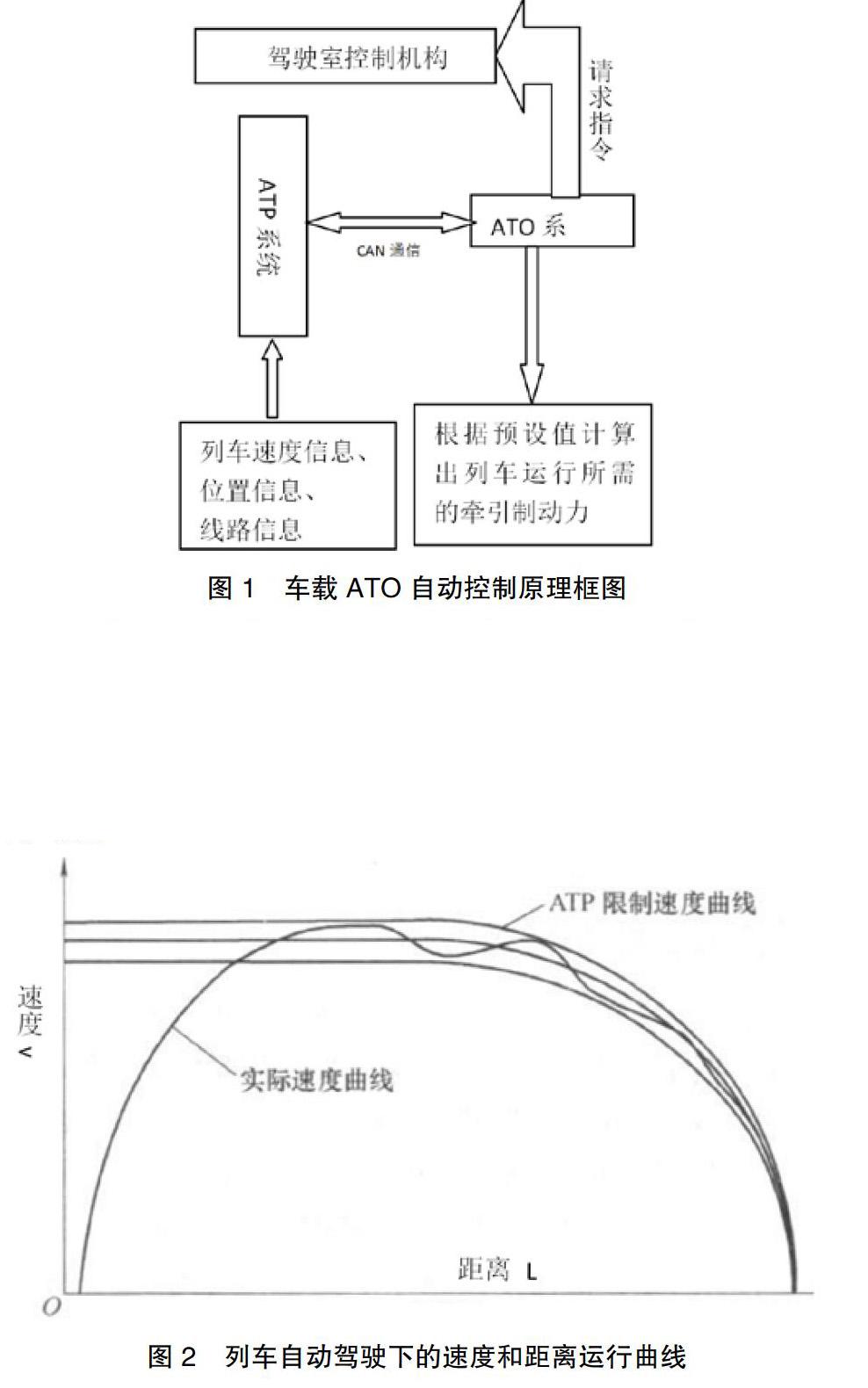
车载 ATO 模块是列车自动驾驶的核心组成,其包括硬件和软件。车载 ATO 模块从 ATP 模块接收到列车的运行速度、线路允许速度、限速和目标速度,以及列车所处位置等信息。车载 ATO 模块综合这些数据信息,实时计算出列车当前所需的牵引力或制动力,然后通过控制指令向列车执行机构发出请求指令,其原理框图如图 1 所示。
利用列车自动驾驶系统对列车进行精确的控制,使列车驾驶最大程度处于最佳的运行状态。列车在运行过程中合理的速度需求,可以使列车运行效率显著提升,同时也可以减小列车的能源消耗。在列车运行过程中,根据所施加牵引力及制动力的大小,列车的运行速度被控制在一定的速度范围内, 列车自动驾驶下的速度和距离运行曲线如图 2 所示。
根据列车自动驾驶过程中的速度、距离曲线,在自动驾驶控制时,列车速度在一个较小的速度区间内波动,采用惰行状态可以提高列车运行效率,较小能源消耗,同时也可以增加乘客的舒适度,通过选择最佳的惰行点防止列车在制动和牵引状态之间频繁切换[3]。
2.2 车站精准停车控制分析
列车全自动驾驶过程中,车站精准停车对提高列车的运营效率,同时提高性行车安全具有重要意义。
列车实现车站精准停车,需要有机结合列车的车载系统、牵引和制动系统,使其能够相互配合。列车监控系统采集列车行驶速度,同时将行驶速度传递给自动驾驶车载模块,通过车载模块对列车速度及位置的分析, 对列车发出控制指令,从而实现列车的精确停车。
列车在车站精确停车,便于在站台设置安全门等防护装置,从而为乘客提供安全的候车、乘车环境。
2.3 自动控制系统质量指标
控制系统受到干扰后,被控量会产生信号波动。控制性能的优劣可以从控制系统输入与输出信号的比较中体现,一般从稳定性、快速性和准确性三个方面来衡量。
控制系统中稳定性使系统能够正常工作,快速性决定被控量对控制量反应的快慢程度,准确性体现了系统被控量所能达到的控制精度。控制系统的这三个控制指标可以通过对控制系统中元件的选择以及参数的合理设置来实现,同时,三个性能指标是互相制约的。因此,在控制系统中,尤其是在无人自动地铁驾驶过程中,利用不同的系统达到不同的控制性能,可以有利于提升地铁的运行效率以及运行过程中舒适性及安全性。因此,自动控制系统参数对地铁全自动无人驾驶系统的运营有着重要意义。
3 结语
随着时代的不断发展,地铁无人驾驶技术的发展将越来越成熟,而自动控制技术对其发展有着积极的促进作用。通过自动控制系统的不同参数和元件的选择,地铁全自动驾驶技术可以更精准、安全、高效的运营, 同时还可以提供更舒适的乘车环境。在未来,地铁驾驶的发展方向必定朝着智能化发展, 同时,满足乘客的方便快捷乘车的需求。提高全自动列车驾驶系统中自动控制技术控制性能的最优化,依然是我们需要努力的方向。
参考文献:
[1]黄良骥,唐涛.地铁列车自动驾驶系统分析与设计[J].北方交通大学学报,2002.
[2]胡寿松.自动控制原理[M].北京:国防工业出版社,1984.
[3]肖衍,苏立勇.轨道交通全自动驾驶系统集成技术研究[J].中国铁路,2015(05):39-42.
