3MDZ-4型自走式棉花打顶喷药联合作业机设计
2019-10-12彭强吉康建明宋裕民何青海
彭强吉,康建明,宋裕民,何青海
3MDZ-4型自走式棉花打顶喷药联合作业机设计
彭强吉1,2,康建明1※,宋裕民1,何青海1
(1. 山东省农业机械科学研究院,济南 250100; 2. 石河子大学机械电气工程学院,石河子 832000)
针对现有棉田打顶机打顶率低,打顶和喷药环节独立作业造成拖拉机动力浪费的问题,集成精准打顶与变量喷药技术,设计了3MDZ-4型自走式棉花打顶喷药联合作业机,可一次完成棉花分禾收拢、扶禾、打顶、喷药作业。对机具关键部件分-扶禾装置、高度检测系统、打顶系统、喷药系统进行设计分析,确定了分禾宽度为470 mm、高度检测范围为0~320 mm、圆盘刀轴最小转速716 r/min、平行四连杆机构长度等参数,在设计分析的基础上进行田间试验。田间试验结果表明:当该机工作速度为2.5 km/h时,棉花打顶率为 91%,打顶前后棉花高度相关系数为 0.81,相关性强;喷药系统可根据作业速度调节喷药量,实际流量与理论流量相对误差在5%以内。同时,触屏显示器能够实时显示作业速度、作业面积等参数,当药液低于设定值时发出声光报警,提高了棉花打顶喷药机械的智能化水平。该研究可为棉花打顶喷药机械的设计提供理论参考。
农业机械;农作物;设计;棉花;打顶;喷药;试验
0 引 言
棉花打顶是棉花增产增收的关键环节,适时打顶可消除棉株顶端优势,促进吐絮,达到早熟、高产、稳产的目的[1]。目前棉花打顶作业分为人工打顶和化控打顶,人工打顶劳动强度大,作业效率低,贻误农时[2],化控打顶技术需要多次喷洒药液,受外界条件等不可预见因素影响较大,且污染环境。棉花机械打顶已然成为中国棉花规模化、集约化发展的瓶颈,是一个亟需解决的问题[3]。
国外对棉花打顶技术研究较早,经历了蓄力牵引、拖拉机机械动力驱动、液压驱动的发展过程,较具代表性研究工作有:Alex Marquis 设计了世界上第1代棉花打顶机械,该机采用水平牵引式,借鉴剃头刀原理,依靠人力使齿形刀具做水平间歇运动对棉花进行打顶[4];Joseph等[5]设计了双行棉花打顶机,主要解决棉花打顶作业与拖拉机的配合、动力输出等问题;Howell等[6]发明了第三代棉花打顶机,利用垂直标尺测量棉株高度,根据测量高度利用刻度盘实现打顶机高度调控。Andy[7]研发了挂接在拖拉机前端、用液压马达驱动的打顶机。因未能有效解决高度仿形问题,现阶段以美国为首的欧美国家主要通过化控的方法消除棉株顶端优势。
国内棉花机械打顶技术经历了从整机仿形、对地仿形到单行仿形的发展过程,比较有代表性研究工作有:胡斌等研发了首台3MD-12型棉花打顶机,通过地轮仿行,利用拖拉机动力输出进行切割打顶,团队成员在此基础上改进研发了3MDY-12/3MDZK-12型棉花打顶机[8]。周海燕等[9]在早期3WD系列打顶机基础上改进闭环控制系统,设计了基于激光测距的 3WDZ-6 型自走式棉花打顶机,并对关键参数及部件进行了设计。张晓辉等[10]设计了自走式棉田打顶定向施药管理机,对高地隙通用底盘、液压系统等关键部件进行了设计,并进行了田间试验验证。谢庆等[11]设计了基于PLC 伺服控制的棉花打顶机,并进行了田间试验。对于识别系统,目前常用的技术有激光技术、超声波技术、图像处理技术、光电技术等[12-14]。因光电传感器成本低,抗干扰能力强,适应棉田复杂的作业环境,因此棉花高度识别系统多采用光电传感器。但由于受棉田复杂作业环境影响,目前打顶机械装备大多停留在试验阶段。
本文针对现有棉花打顶机打顶率低,打顶和喷药环节独立作业造成拖拉机动力浪费的问题,通过集成精准打顶与变量施药技术,设计了分-扶禾装置、高度检测系统、打顶系统、喷药系统等关键部件,研制了一种以field-programmable gate array(FPGA)控制器为核心的自走式棉花打顶喷药联合作业机,以期实现棉花打顶与施药联合作业。
1 整机结构与工作原理
1.1 整机结构
自走式棉花打顶喷药联合作业机主要由分-扶禾装置、打顶系统、机架升降装置、触屏显示器、控制系统、药箱、平行四杆机构、喷药系统、速度编码器、自走式底盘等组成,如图1所示。

1.分-扶禾装置 2.打顶系统 3.机架升降装置 4.触屏显示器 5.控制系统 6.药箱 7.平行四杆机构 8.喷药系统 9.速度编码器 10.自走式底盘
自走式棉花打顶喷药联合作业机的主要技术参数如表1 所示。

表1 自走式棉花打顶喷药联合作业机主要技术参数
1.2 工作原理
在自走式棉花打顶喷药联合作业机作业之前,根据作业地块棉花高度,首先调节前端机架升降装置,使棉花顶部处于打顶范围内。作业时,分-扶禾装置将行间棉花顶部交叉棉枝分开并收拢,收拢后检测传感器对棉花高度进行检测并将信号传送至控制器,控制器根据棉花高度及机具行进速度调整打顶系统,实现高度升降调整及打顶作业;同时,后端喷药装置在控制器作用下依据行进速度实时调整喷药流量,实现定量喷药作业。作业过程中触屏显示器实时显示刀轴转速、作业速度、作业面积、喷药流量等参数。
2 关键部件设计与参数确定
2.1 分-扶禾装置设计
棉花打顶作业经历分禾-扶禾-切割-放开4个过程,由于生长期棉花整体形状呈现枝蔓型伞状,植株粗大、分枝多且植株间交错,为减小因主动分禾装置造成撞铃、撞桃、损坏棉叶等问题,基于棉花种植模式及空间分布特征设计分-扶禾装置。机采棉种植模式为(66+10)cm,如图2所示。
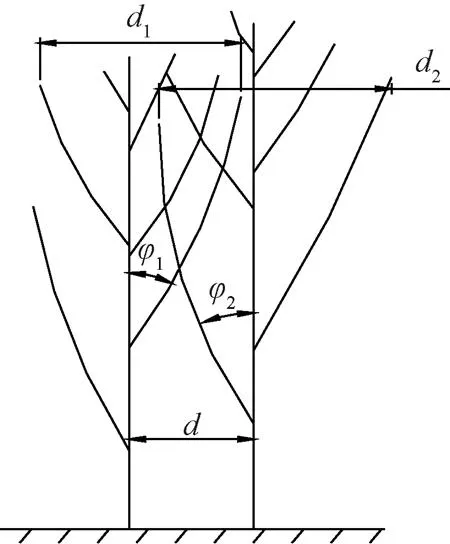
注:d为相邻两株棉花距离,cm;d1、d2为相邻两株棉花角果层最大直径,cm;φ1、φ2为最外层分枝与主茎秆的夹角,(°)。
为实现分禾装置最大限度分禾[15],分禾装置的最大宽度max应不小于相邻两植株上缠绕分枝拉平后的长度,根据几何关系,需要满足的条件为

式中max为分禾器最大宽度,cm。
分-扶禾装置主要由分禾板、扶禾板、下固定板、挂接板、传感器固定板等组成,如图3所示。
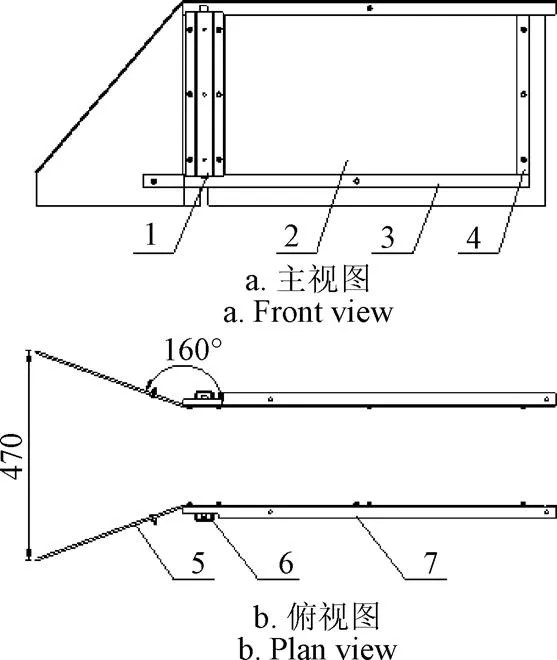
1.传感器固定板 2.扶禾板 3.下固定板 4.连接板 5.分禾板 6.检测传感器 7.挂接板
由图3可知,连接板上端与挂接板焊合,下端与下固定板焊合,构成装置主体。分禾板通过螺栓固定在该主体结构前端,扶禾板通过螺栓固定在主体结构中间;传感器固定板通过螺栓固定在分禾板与扶禾板交接位置,检测传感器通过螺栓固定在传感器固定板内部;整个装置成对称结构,前端成“八”字型。作业过程中,分禾板将大行之间棉枝分开后收拢至扶禾板,配合打顶系统完成打顶作业。综合上述设计依据和前期测量的棉花植株几何特性参数,确定分禾装置最大宽度为470 mm。
2.2 棉花高度检测系统设计
棉花高度检测系统由高度识别传感器和FPGA控制器等组成。棉花高度识别传感器由33对光电传感器组成。测量光幕传感器是一种特殊的光电传感器,包含相互分离且相对放置的发射管BMEL2410A和接收管BMRL2410A两部分,发射接收管间距200 mm。传感器测量值为棉花顶部最高高度。识别范围为0~320 mm,即由棉花平均高度上下160 mm,低于识别范围无检测信号,高于识别范围将最高点视为棉株高度。
作业时,棉株从传感器中间穿过,发射管发出的光束被遮挡,接收管接收不到光束,接收管截止,接收管输出高电平信号;如果没有棉株从传感器中间穿过,发射管发出光束被接收管接收,接收管导通,接收管输出低电平信号。配合 FPGA 控制器及其软件,采集最后阻挡光线号数即可分析检测数据,实现对棉花高度的精准检测。
2.3 打顶系统设计
2.3.1 结构与工作原理
棉花打顶系统主要由打顶装置和升降控制装置组成,打顶装置由直流电机、联轴器b、轴承安装座、刀轴、切割刀等组成;升降控制装置由减速器、联轴器a、伺服电机Ⅰ、电机安装座、上固定板、中间连接板、下固定板、直线滑轨、成套丝杠、升降底座、等组成,结构如图4所示。
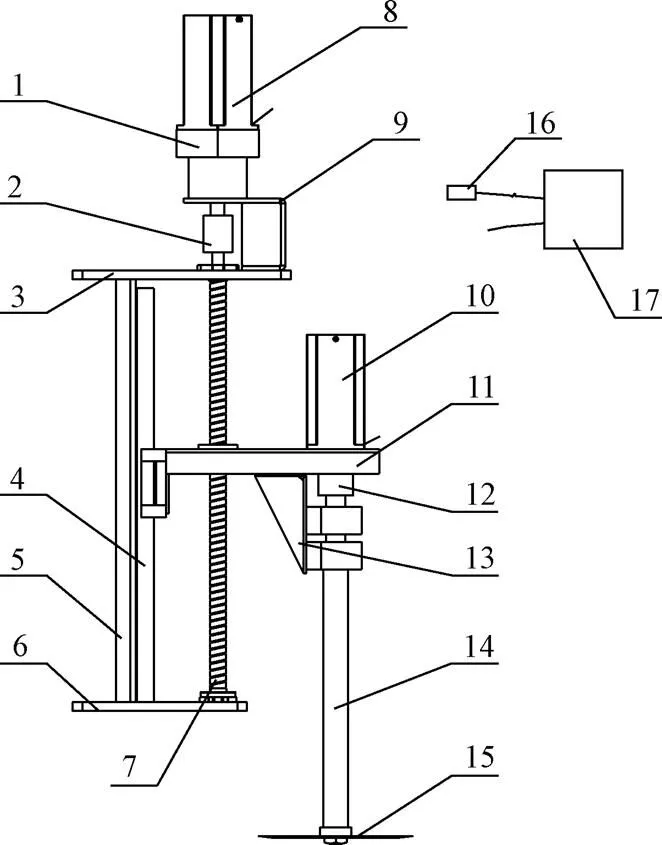
1.减速器 2.联轴器a 3.上固定板 4.直线滑轨 5.中间连接板 6.下固定板 7.成套丝杠 8.伺服电机 9.电机安装座 10.直流电机 11.升降底座 12.联轴器b 13.轴承安装座 14.刀轴 15.圆盘刀 16.速度编码器 17.控制器
作业时,控制器根据所测棉花高度控制伺服电机转向及转角,需要上升打顶时,伺服电机正转,丝杠带动打顶装置沿导轨上升;需要下降打顶时,伺服电机反转,丝杠带动打顶装置沿导轨下降。打顶刀为圆盘锯齿刀,直流电机通过刀轴驱动圆盘刀旋切,实现精准打顶。
2.3.2 升降装置工作性能分析
要实现棉花的精准打顶,要求传感器检测到棉花高度信号,信号传输到打顶装置,打顶装置需按规定时间内升降至准确的打顶高度。将棉花实际生长高度与理想打顶高度分别连接成曲线图,理想打顶效果如图5所示。

图5 棉花打顶效果原理示意图
为达到打顶理想状态,要求机具正常行驶速度下经过相邻两株棉花所需时间应大于打顶装置升降到最大高度的时间。即
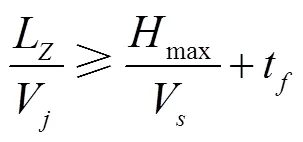
式中L为棉花株距,cm;V为机具行进速度,m/s;max为打顶装置升降最大高度,cm;V为升降速度,m/s;t为控制器处理信号时间,ms,一般为几毫秒,可忽略不计。
即
从式(3)可得,在棉花株距、升降高度一定时,机具行进速度与打顶装置升降速度匹配打顶效果理想。文中伺服电机采用60ASM400-24V型号电机(深圳市杰美康机电有限公司生产),额定转速3 000 r/min;减速器采用PLE60-5型号减速器(深圳市杰美康机电有限公司生产),减速比为1/5,实际转速为600 r/min;所用成套丝杠导程为7 cm。
基于上述相关性,棉花高度变化平缓,机具行进速度较慢时打顶效果理想。但是在棉花高度变化较大或者机具行进较快时,打顶质量下降明显。
棉花打顶要求为一叶一芯,经田间测量可得一叶一芯的棉顶高度在4~10 cm内,基于棉花打顶量在7 cm上下波动时,能够取得较好的打顶效果[16],引进二次指数平滑法对棉花打顶量进行修匀,以期提高棉花打顶效率和质量。
指数平滑是产生平滑时间序列的一种比较流行的方法,也是绘制拟合曲线的一种方法[17-19],基本思想是在预测下一周期的指标时, 既考虑本周期的指标, 又不忘记前面的指标。平滑法预测是通过时间序列的修匀,消除原序列中随机因素对事物的影响,使研究对象的趋势规律更加清晰,并在此基础上进行预测分析。即通过指数平滑法对棉花打顶量进行修匀,相邻2株棉株高度差较大时,打顶量大于或者小于7 cm,保证打顶量在7 cm左右上下波动,如图6所示。控制器对打顶装置的实际打顶位置进行预测控制,消除剧烈波动值,实现平滑控制打顶。

图6 打顶量修匀效果示意图
采用二次指数平滑法,对检测到的棉花高度值进行打顶量修匀后打顶位置点进行预测。


二次指数平滑法的预测模型为
其中

式中F为第期预测值;为向未来预测的期数;a、b分别为模型参数。
采用二次指数平滑后打顶效果如图7所示,从图中可得,打顶修匀后棉株高度曲线平缓,消除了因棉花高度突然变化引起的剧烈波动问题,更加有利于控制器控制升降装置的升降运动,实现快速动作,提高机具的作业速度。
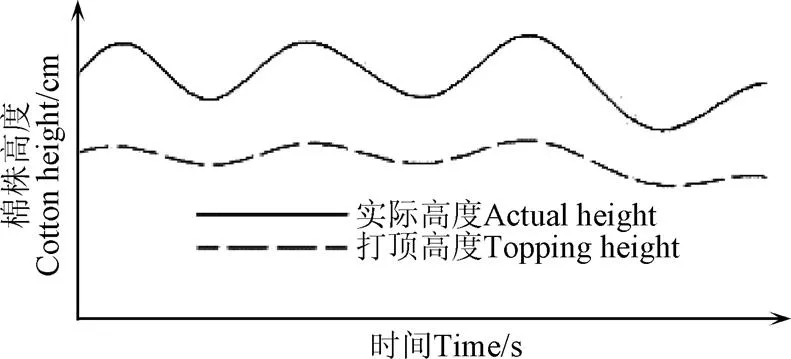
图7 修匀后打顶效果示意图
2.3.3 打顶刀转速确定
打顶期内棉花顶芯直径在2.7~5.9 mm范围内,顶芯较脆,为保证切割效果,综合工作稳定要求及机械设计要求等因素,采用水平旋转式切割方式。打顶圆盘刀在水平面内作回转运动,采用锯齿式圆盘刀。圆盘刀任一点的速度均由刀片圆周速度与自走式底盘行进速度合成[20-21]。故任意点速度v为

由式(9)可知,当
即

式中v为打顶刀任一点速度,m/s;vmin为打顶刀最小速度,m/s;0为打顶刀盘转速,r/min;v为机具行进速度,m/s;为刀盘的角速度,rad/s;为刀盘转过的初始角度,rad;1为刀盘旋转时间,s;1为刀盘半径,m。
无支撑旋转式圆盘刀在切割棉花顶芯时,其刀片线速度不低于15 m/s[10]。整个打顶刀盘圆周速度相等,以圆周上任一点为基准,旋转刀盘半径0.2 m,将以上数据带入式(12),计算得刀轴最小理论转速0为716 r/min。考虑棉田实际作业的功率损耗,选用型号5D90GN型直流电机,24V90W,额定转速1 000 r/min(常州市戴维电机有限公司生产)。
2.4 变量喷药系统设计
2.4.1 结构与工作原理
变量喷药系统结构如图8所示,主要由药箱、开关阀、药液泵、溢流阀、电动调节阀、流量计、速度编码器、控制器(与打顶系统共用)、显示器、喷头、液位传感器等组成。
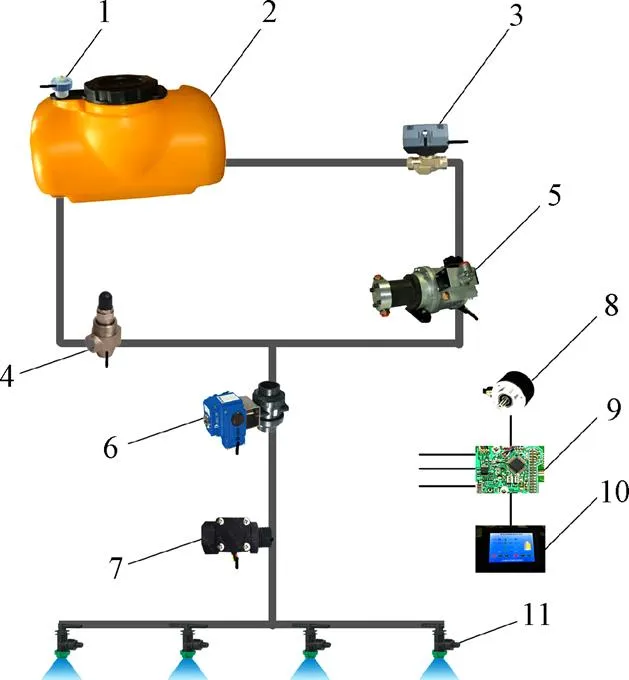
1.液位传感器 2.药箱 3.开关阀 4.溢流阀 5.药液泵 6.电动调节阀 7.流量计 8.速度编码器 9.控制器 10.触屏显示器 11.喷头
通过显示器设定喷药量,作业过程中速度编码器实时监测机具行进速度,并将信号传送至控制器,控制器根据速度信号和当前输入的公顷喷药量,实时控制调节阀开关量,通过控制流量实现变量喷药作业。
2.4.2 参数设计
针对常量喷药作业条件下,施药均匀性差和农药浪费严重的问题,本文利用变量施药技术,通过机具行进速度与喷药量匹配,实现喷药过程的精量控制,提高作业质量[22-23]。作业速度与公顷流量公式
式中为公顷喷量,L/hm2;为理论流量,L/min;为作业速度,m/s;为作业幅宽,m。
应用目前比较常用的涡轮流量计测量实际流量,流量计输出的电流信号为4~20 mA,与之对应的流量范围是0~8 000 L/h。
电流与流量公式
式中Q为实际流量,L/min;Q为流量测量上限值,L/h;为电流输出,mA。
速度编码器实时监测机组的作业速度,涡轮流量计实时监测药液流量,控制器根据速度与流量信号实时调整调节阀开启程度,保证喷药量一致。
2.4.3 平行四杆机构设计
喷药过程中因喷杆需要根据棉株高度变化进行高度调整,喷头方向不变,调整动作响应快等特点,高度仿行机构采用平行四杆结构[24-25]。
以电动缸与平行四杆固定边铰接点为坐标原点,水平方向为轴,垂直向下方向为轴,建立直角坐标系,如图9所示。

图9 仿行机构示意图
由平行四连杆结构参数可知,点沿轴方向的位移即为喷杆沿轴方向的位移。图示点的位置纵坐标为
式中L为之间的长度,mm;L为之间的长度,mm;L为之间的长度,mm;L为之间的长度,mm。
当点移动到′时,点′的纵坐标为

其中
式中为电动缸伸缩量,伸长为正,收缩为负,mm;为电动缸运动速度,mm/s;2为调节执行时间,s。
由式(15)-(17)可得点的垂直位移为
根据自走式底盘结构参数与棉花高度特征,L取210 mm,L取640 mm,L取400 mm;L取值范围为360~600 mm。则由式(18)可以得出,喷杆垂直方向的调整量受L当前取值、电动缸运动速度、调制时间2及电动缸伸缩运动状态的影响。
3 控制系统设计
3.1 硬件电路设计
整机控制系统以FPGA控制器为核心元件,主要由速度编码器、检测光幕、流量传感器、液位检测传感器、伺服电机、直流电机、电动缸、电磁开关阀、电动调节阀、通讯电路、电源开关、控制器等组成,如图10所示。传感器主要用于检测指标的信号采集,电机主要用于实现旋转与升降控制,电磁开关阀和电动调节阀分别实现通断与开关量调节;其中,触摸屏由输入、输出、显示电路等组成,主要实现人机交互、显示即时指标信息及实时监控;电源由两块12V/120Ah/850A电池组成。

图10 整机控制系统结构
3.2 控制流程图
控制系统工作流程图如图11所示。
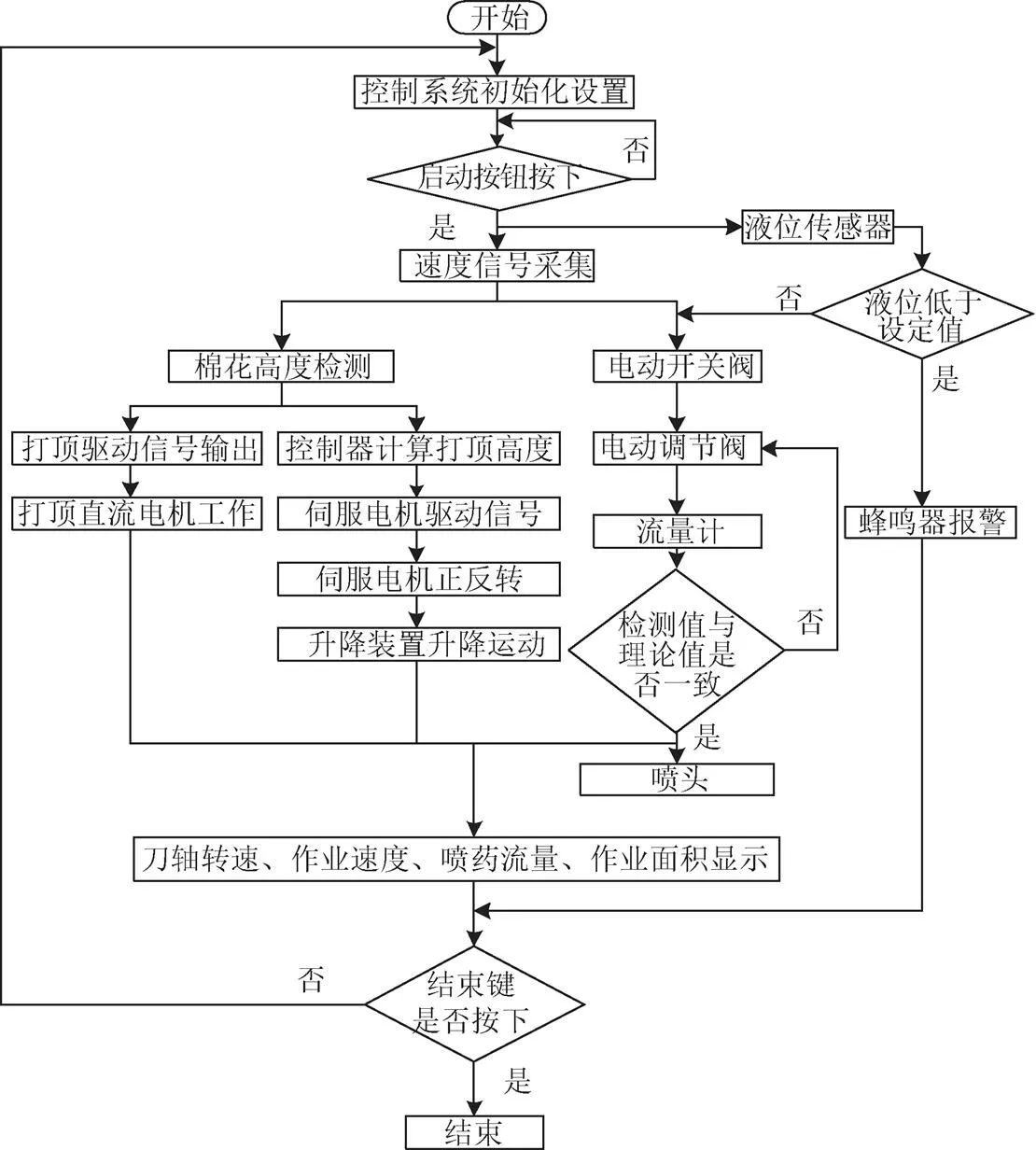
图11 整机控制流程
开启触摸屏设置基本参数,按下启动按钮后,速度编码器采集机具行进速度,将信号传递到控制器,打顶与喷药系统开始工作。控制器一方面根据作业速度和棉花高度信号控制打顶系统完成打顶作业,另一方面根据作业速度和喷药量控制喷药系统完成喷药作业。同时液位传感器实时检测药箱液位高度,当液位低于设定值时蜂鸣器报警,触屏显示界面实时显示当前各作业参数。
3.3 机载显示器选择
触屏显示器选用北京迪文科技有限公司的5.0英寸65K色的DGUS 屏,分辨率为800像素×480像素,亮度为900 nit,阳光直射下界面内容也清晰可见[26-28]。本文设计的显示器主界面显示机具的每行设定打顶量、刀轴转速、作业速度、喷药流量、作业面积等作业参数。
4 整机性能试验
4.1 打顶性能试验
试验于2018年7月22日至27日在山东滨州市无棣县西黄一村机采棉试验基地,进行棉花打顶喷药联合作业机田间性能试验。试验品种为中棉915,前茬作物为棉花,种植模式为一膜六行机采棉模式,棉田种植密度1.2×105株/hm2;试验用地1.0 hm2,试验小区地表较为平整,处于打顶期内的棉花作为试验样品。试验以打顶率和打顶前后棉花高度相关系数作为评价指标。
式中为试验小区内打顶率,%;n为已打顶的有效棉株数;为试验小区内有效棉株数。


试验设3个试验小区,每个小区面积304 m2(3.04 m× 100 m),即每个测试区长为100 m,通过动力换挡和油门实现机具前进速度的改变,速度由低到高速度区排开,在地头和地尾处分别留出20 m的调头预备区。每个测试区各行间随机布置6个处理小区,小区面积为0.76 m× 5 m,用准备好的标识牌标记各小区,并记录小区内棉花有效株数。棉花高度的测量方法采用人工测量自然状态下棉株顶部到地面的垂直距离。试验方法参照《农作物田间试验实用手册》[30],田间试验如图12所示。

图12 田间试验
表2为打顶性能指标统计。从表2可以看出,随着作业速度的提高棉花打顶后的标准差、相关系数逐渐减小,说明通过二次指数平滑修匀后棉花高度标准差变小,作业速度在2.5 km/h时,打顶率为91%,打顶前后相关性强。试验过程中样机运转稳定,工作安全可靠,能够较好的完成棉花打顶作业。

表2 打顶性能指标统计
4.2 变量喷药试验
变量喷药是在给定的目标喷药量下进行定量喷药,实际喷药流量与目标喷药流量的误差值是衡量喷药系统精度的重要指标。为便于测量,试验测定时使用不含药液的清水,在喷头下方安装接药袋;为保证试验的稳定有效,试验过程在平坦路面上进行。喷药量设定为300 L/hm2时,机具按照2、3、4 km/h的速度稳定行驶,测试距离50 m,每个作业速度重复试验3次,试验完成后将接药袋中的清水分别收集编号;然后用JJ-1000型电子秤(天津电子天平公司,精度0.01 g)称出收集液体的质量,并记录,试验统计结果如表3所示。

表3 定量喷药一致性试验结果
从表3中可以看出,变量喷药系统在设定的喷药量下进行定量喷药作业时,随着作业速度的增加,实际喷药量增加,实际流量与理论流量相对误差在5%以内,能够达到定量喷药的目的。
5 结 论
1)基于高地隙自走式通用底盘作为承载体,研制了3MDZ-4型自走式棉花打顶喷药联合作业机,一次作业完成棉花打顶、喷药作业,与传统工作方式相比,减少了棉花管理的中间环节,提高作业效率的同时降低了劳动强度。
2)对分-扶禾装置、高度检测系统、打顶系统、喷药系统等关键部件进行了设计,确定了分禾宽度为470 mm,圆盘刀轴最小转速716 r/min、平行四连杆机构长度参数等;以FPGA控制器为核心的3MDZ-4型自走式棉花打顶喷药联合作业机控制系统,能够实现人机交互,显示当前设定的打顶量,实时显示当前作业速度、作业面积、喷药流量等参数;药箱药液低于设定值时发出声光报警。
3)3MDZ-4型自走式棉花打顶喷药联合作业机前端打顶部分,能够一次性完成棉花分禾、收拢、扶禾打顶作业。打顶作业前,可根据棉花高度通过调节机架升降装置实现初步调整,作业过程中高度检测范围0~320 mm;作业过程中控制系统根据机具前进速度实时调整打顶响应时间。当作业速度在2.5 km/h时,打顶率为91%,打顶前后棉花高度相关系数为0.81。后端喷药部分,能够根据作业速度实时调整喷药量,试验表明实际流量与理论流量相对误差在5%以内,能够达到定量喷药的目的。
[1] 何磊,刘向新,周亚立,等. 垂直升降式单体仿形棉花打顶机[J]. 农业机械学报,2013,44(增2):62-67.
He Lei, Liu Xiangxin, Zhou Yali, et al. Vertical lift type single profiling cotton topping machine[J]. Transactions of the CSAM, 2013, 44(Supp.2): 62-67. (in Chinese with English abstract)
[2] 彭强吉,荐世春,宋和平,等. 3MDZJ-1型电力驱动式棉花智能精准打顶机的研制[J]. 农机化研究,2016, 38(12):117-121.
Peng Qiangji, Jian Shichun, Song Heping, et al. Development of 3 MDZJ-1type power driven intelligent precision cotton topping machine[J]. Journal of Agricultural Mechanization Research, 2016, 38(12): 117-121. (in Chinese with English abstract)
[3] 陈传强,蒋帆,张晓洁,等. 我国棉花生产全程机械化生产发展现状、问题与对策[J]. 中国棉花,2017,44(12):1-4.
Chen Chuanqiang, Jiang Fan, Zhang Xiaojie, et al. The present situation problems and countermeasures of mechanized production of cotton in china[J]. China cotton, 2017, 44(12): 1-4. (in Chinese with English abstract)
[4] Alex M, Willie S. Cotton topper and boll weevil catcher1325406[P]. 1919-12-16.
[5] Joseph W B, Augusta C. Cotton topper: 2578963[P]. 1951-10-18.
[6] Howell J P, Canyo T. Rotary cotton topper: 2720740[P]. 1955-10-18.
[7] Andy A K. Cotton topper: 3017732[P]. 1962-01-23.
[8] 罗昕,胡斌,王维新,等. 3MDZK-12 型组控式单行仿形棉花打顶机[J]. 农机化研究,2008,30(11):136-138.
Luo Xin, Hu Bin, Wang Weixin, et al. 3MDZK-12 type group control and single row profiling cotton topping machine[J]. Journal of Agricultural Mechanization Research, 2008, 30(11): 136-138. (in Chinese with English abstract)
[9] 周海燕,尹素珍,朱立成,等. 3WDZ-6型自走式棉花打顶机设计[J]. 农业机械学报,2010,41(增刊1):86-89.
Zhou Haiyan, Yin Suzhen, Zhu Licheng, et al. Design of 3WDZ-6 self-propelled cotton top cutting[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(Supp.1): 86-89. (in Chinese with English abstract)
[10] 张晓辉,刘刚,初晓庆,等. 自走式棉田打顶定向施药管理机的设计与试验[J]. 农业工程学报,2015,31(22):40-48.
Zhang Xiaohui, Liu Gang, Chu Xiaoqing, et al. Design and experiment of self-propelled cotton topping and directional spraying machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(22): 40-48. (in Chinese with English abstract)
[11] 谢庆,石磊,张玉同,等. 基于PLC伺服控制的棉花打顶机设计与试验研究[J]. 农机化研究,2017,39(1):87-91.
Xie Qing, Shi Lei, Zhang Yutong, et al. The growth device and preliminary test for hydroponic spinach based on ozone concentration[J]. Journal of Agricultural Mechanization Research, 2017, 39(1): 87-91. (in Chinese with English abstract)
[12] 沈晓晨. 棉花打顶机棉株高度识别技术的研究[D]. 石河子:石河子大学,2018.
Shen Xiaochen. The Height of the Cotton Plant Identification Technology for Cotton Top-cutting Machine[D]. Shihezi: Shihezi University, 2018. (in Chinese with English abstract)
[13] 史增录,张学军,丁永前,等. 基于自动检测与控制的棉花打顶装置的设计[J]. 中国农机化学报,2017,38(12):58-62.
Shi Zenglu, Zhang Xuejun, Ding Yongqian, et al. Design of cotton topping device based on automatic detection and control[J]. Jouranal of Chinese Agricultural Mechanization, 2017, 38(12): 58-62. (in Chinese with English abstract)
[14] 耿爱军,张晓辉,苗乃树,等. 3YDX-3型烟草打顶抑芽机设计[J]. 农业工程学报,2010,26(7):96-101.
Geng Aijun, Zhang Xiaohui, Miao Naishu, et al. Development of 3YDX-3 topping and restrain-germinating machine of tobacco[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(7): 96-101. (in Chinese with English abstract)
[15] 潘佛雏. 密植作物用植保机械分禾装置的研究[D]. 石河子:石河子大学,2018.
Pan Fouchu. Study on Separate-Seedling Device of Plant Protection Machinery for Dense Planting Crops[D]. Shihezi: Shihezi University, 2018. (in Chinese with English abstract)
[16] 彭强吉,胡斌,罗昕,等. 不同打顶时间和高度对北疆高产棉花产量的影响[J]. 中国棉花,2012,39(5):23-25.
Peng Qiangji, Hu Bin, Luo Xin, et al. The experimental study on the influence of yield of cotton in different topping time and topping height in north Xinjiang[J]. China Cotton, 2012, 39(5): 23-25. (in Chinese with English abstract)
[17] 单志龙,王宣琳. 基于指数平滑预测模型的移动节点定位算法[J].华南师范大学学报:自然科学版,2016,48(5):123-128.
Shan Zhilong, Wang Xuanlin. A localization algorithm based on index smoothing prediction model for mobile nodes[J]. Journal of South China Normal University: Natural Science Edition, 2016, 48(5): 123-128. (in Chinese with English abstract)
[18] 单志龙,刘兰辉,张迎胜,等. 一种使用灰度预测模型的强自适应性移动节点定位算法[J]. 电子与信息学报,2014, 36(6):1492-1497.
Shan Zhilong, Liu Lanhui, Zhang Yingsheng, et al. A strong self-adaptivity localization algorithm based on gray prediction model for mobile nodes[J]. Journal of Electronics &Information Technology, 2014, 36(6): 1492-1497. (in Chinese with English abstract)
[19] 刘钱超,吴利,郑礼辉. 一种基于二次移动平均法的容器云伸缩策略[J]. 计算机技术与发展,2019(9):1-11.
Liu Qianchao, Wu Li, Zheng Lihui. A container cloud scaling strategy based on double moving average method[J]. Computer Technology and Development, 2019(9): 1-11. (in Chinese with English abstract)
[20] 周杨. 工业大麻圆盘切割装置的设计与试验研究[D]. 北京:中国农业科学院,2017.
Zhou Yang. Design and Expeirmental Research of Hemp Plate Cutter[D]. Beijing: Chinese Academy of Agricultural Sciences, 2017. (in Chinese with English abstract)
[21] 刘庆庭,区颖刚,卿上乐,等. 光刃刀片切割甘蔗茎秆破坏过程高速摄像分析[J]. 农业机械学报,2007,38(10):31-35.
Liu Qingting, Ou Yinggang, Qing Shangle, et al. High-speed photography analysis on the damage process in cutting sugarcane stalk with smooth-edge blade[J]. Transactions of the Chinese Society for Agricultural Machinery, 2007, 38(10): 31-35. (in Chinese with English abstract)
[22] 沈景新,孙永佳,孙宜田,等. 3WP-650型智能变量喷杆喷雾机的设计与试验[J]. 中国农机化学报,2016,37(6):238-242.
Shen Jingxin, Sun Yongjia, Sun Yitian, et al. Design and test of 3WP-650 type intelligent variable spray rod spray machine[J]. Jurnal of Chinese gricultural mechanization, 2016, 37(6): 238-242. (in Chinese with English abstract)
[23] 蒋焕煜,张利君,刘光远,等. 基于PWM变量喷雾的单喷头动态雾量分布均匀性实验[J]. 农业机械学报,2017,48(4):41-46.
Jiang Huanyu, Zhang Lijun, Liu Guangyuan, et al. Experiment on dynamic spray deposition uniformity for PWM variable spray of single nozzle[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(4): 41-46. (in Chinese with English abstract)
[24] 尹建军,刘丹萍,李耀明. 方捆机捡拾器高度自动仿形装置参数分析与试验[J]. 农业机械学报,2014,45(8):86-92.
Yin Jianjun, Liu Danping, Li Yaoming, Design and parameters analyses of automatic height profiling device of quadrate-bale baler pickup[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(8): 86-92. (in Chinese with English abstract)
[25] 薛涛,谢斌,毛恩荣,等. 玉米去雄机去雄作业控制系统设计与试验[J]. 农业工程学报,2015,31(4):49-54.
Xue Tao, Xie Bin, Mao Enrong, et al. Design and experiment of emasculation control system of corn detasseling machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(4): 49-54. (in Chinese with English abstract)
[26] 王锦江,陈志,杨学军,等. 3QXZ-6型制种玉米去雄机设计与试验[J]. 农业机械学报,2016,47(7):112-118.
Wang Jinjiang, Chen Zhi, Yang Xuejun, et al. Design and experiment of 3QXZ-6 seed corn detasseling machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 112-118. (in Chinese with English abstract)
[27] 孙永佳,沈景新,窦青青,等. 基于Cortex-M3的免耕播种机监控系统设计与试验[J]. 农业机械学报,2018,49(8):50-58.
Sun Yongjia, Shen Jingxin, Dou Qingqing, et al. Design and test of monitoring system of no-tillage planter based on Cortex-M3 processor[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(8): 50-58. (in Chinese with English abstract)
[28] 孟鹏祥,耿端阳,李玉环,等. 基于单片机与DGUS显示的精密播种机监测系统研究[J]. 农机化研究,2017,39(2):171-175.
Meng Pengxiang, Geng Duanyang, Li Yuhuan, et al. Research on the monitoring system of the precision seeder based on single chip microcomputer and display DGUS[J]. Journal of Agricultural Mechanization Research, 2017, 39 (2): 171-175. (in Chinese with English abstract)
[29] 徐国伟,王贺正,翟志华,等. 不同水氮耦合对水稻根系形态生理、产量与氮素利用的影响[J]. 农业工程学报,2015,31(10):132-141.
Xu Guowei, Wang Hezheng, Zhai Zhihua, et al. Effect of water and nitrogen coupling on root morphology and physiology,yield and nutrition utilization for rice[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(10): 132-141. (in Chinese with English Abstract)
[30] 李自学. 农作物田间试验实用手册[M]. 北京:中国农业科学技术出版社,2007.
Design of 3MDZ-4 self-propelled cotton topping and spraying combined machine
Peng Qiangji1,2, Kang Jianming1※, Song Yumin1, He Qinghai1
(1.,250100,;2.,832000,)
The apical dominance of cotton was unfavorable to the grown of cotton. Cotton topping at the appropriate time can eliminate the apical dominance of cotton, achieving the purposes of precocity, high yield and stable the production. As such, topping based on artificial, topping based on chemical control method, and topping based on mechanical method are developed. However, there are some disadvantageous factors to restrict the promotion and application of topping based on artificial and chemical control methods. The cost of topping based on artificial method is too high, and is inadequate to apply in large scale. The stability of the topping based on chemical control method is low with some variable factors, and some environmental pollution problems are also an issue. Therefore, topping based on mechanical method is chosen as the suitable method to cotton topping. The low efficient is shown on current cotton topping machine, and the operations of topping and pesticide is achieved independently so that large energy and man power are wasted. Therefore, to overcome this disadvantages, in this study, an integrated idea of topping accurately and variable rate of pesticide spraying was presented, and a 3MDZ-4 self-propelled cotton topping and spraying machine was developed, with functions of the seedling divided, the seedling holding, the topping and the pesticide spraying simultaneously. The seedling divided-holding device, the height detection system, the topping system, and the spraying system were the critical components of the machine. To assure the quality of the designed machine, based on the design and analysis of the critical components, the critical parameters were obtained. The critical parameter of the seedling divided width was 470 mm. The critical parameter of the height detection range was 0-320 mm. The critical parameter of the minimum speed of disc cutter was 716 r/min. The critical parameter of the length of parallel four connecting rods was 640 mm. Through the field experiments, it was found that the topping efficiency was 91%, with the running speed of 2.5 km/h, indicated that the high efficiency of topping was realized. The coefficient of association of the cotton height was 0.81, indicating there was strong correlation between before topping and after topping. The spraying quantity was adjustable according to the running speed, the relative error of the actual flow and the theoretical flow was less than 5% so that the variable spraying could be achieved. The designed machine could realize the man-machine interaction. The current spraying quantity, the running speed, the working area and the spraying quantity of flow all could be display real-time on the touch-screen display. For the process monitoring, the sound and light alarm was achieved with the pesticide liquid was lower than set value, which improved the intelligent level of the cotton topping and the spraying machine. This research could provide some theoretical references for design of the cotton topping and spraying machine.
agricultural machinery; crops; design; cotton; topping; spraying; test
2019-05-10
2019-06-30
山东省重点研发计划项目(2017NC212009)
彭强吉,博士生,主要从事农业机械装备与关键技术的研究。Email:pengqiangji@shandong.cn
康建明,副研究员,主要从事农业机械装备与关键技术的研究。Email:kjm531@sina.com
10.11975/j.issn.1002-6819.2019.14.004
S491
A
1002-6819(2019)-14-0030-09
彭强吉,康建明,宋裕民,何青海. 3MDZ-4型自走式棉花打顶喷药联合作业机设计[J]. 农业工程学报,2019,35(14):30-38. doi:10.11975/j.issn.1002-6819.2019.14.004 http://www.tcsae.org
Peng Qiangji, Kang Jianming, Song Yumin, He Qinghai. Design of 3MDZ-4 self-propelled cotton topping and spraying combined machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(14): 30-38. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.14.004 http://www.tcsae.org
