基于Arduino的轮椅式上肢康复训练系统的设计与开发
2019-10-11汤玄
汤玄


摘 要:上肢在日常生活中有着重要的功能,上肢功能障碍会严重降低患者的日常生活质量。文章设计完成了一套以步进电机驱动为驱动的上肢康复训练装置。主要工作内容包括:建立上肢康复训练装置的三维模型,使用Arduino作为控制芯片设计了控制系统整体电路,并搭建移动式上肢康复训练装置的控制系统硬件平台,开发并编写了康复训练装置上位机控制系统软件,最后验证了装置被动康复训练可行性。
关键词:上肢康复训练装置;Arduino;硬件平台;运动控制系统1 研究背景及意义
脑卒中是发病率、致残率和死亡率都高的多发病症,是危害人类健康的最主要疾病之一。在脑卒中患者中,因为脑卒中导致终生残疾的高达86.5%,导致生活不能自理的高达42.3%。在这些脑卒中患者中,肢体功能障碍是最常见的病理表现,而上肢功能障碍会给生活造成诸多不便。
上肢康复训练机器人是一种常用的上肢功能康复训练的智能设备,可以帮助上肢功能障碍患者完成各种轨迹上肢康复训练。与人工治疗相比,这种康复机器人能够承受的工作强度高,且性能稳定,可持续提供高强度且科学准确的康复治疗,而不须考虑治疗师的技能和疲劳程度[1]。
2 康复装置结构设计
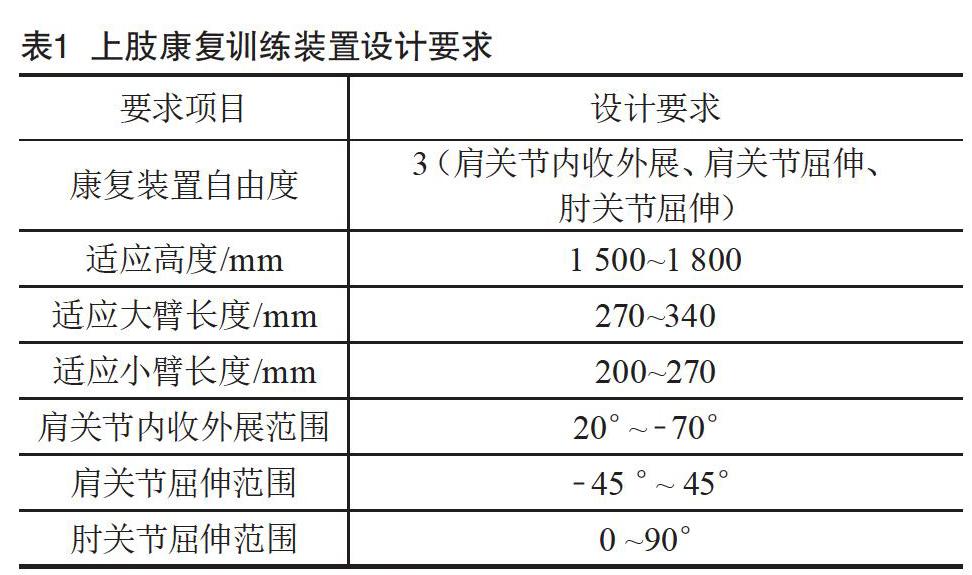
本设计的上肢康复训练装置在运动实现上设计为:使肩关节可以完成水平面内的肩关节内收外展运动和矢状面的屈伸运动,使肘关节可以完成矢状面的屈伸运动,使腕关节的屈伸和侧弯运动均可以由肩关节运动和肘关节运动带动。
经过查阅资料和计算可知上肢康复训练装置的设计要求如表1所示。
本文设计的步进电机驱动上肢康复训练装置安装在轮椅的右侧扶手上方,上肢康复训练装置需要安装在一个固定平台上进行康复训练,即将装置安装在轮椅上。上肢机械臂外骨骼的结构如图1所示,其中,1为肩关节内收外展驱动步进电机,可以驱动肩关节完成﹣70°~20°范围内的内收外展康复运动。2,3为肩关节屈伸运动驱动连杆,在2,3连杆的共同作用下,肩关节可以完成﹣45°~ 45°范围内屈伸运动。4,5为驱动肘关节屈伸运动的连杆,在这两根连杆的共同作用下,肘关节可以完成0~90°屈伸运动。6,7分别为上肢外骨骼的大臂和小臂,该部分可手动调节长度以满足设计要求中提出来的装置对不同患者身高具有一定的兼容性,其中,大臂的调节范围为270~330 mm,小臂的调节范围为200~280 mm。8,9,10分别为上肢康复机械臂外骨骼肩关节部分,肘关节部分和把手部分[2]。
3 下位机系统设计
本研究设计的上肢康复训练控制系统中下位机系统整体的技术路线为:上位机控制系统发送运动控制指令,下位机系统接收到指令后,将指令转换为控制信号,输出给驱动端的控制器,完成对上肢机械臂外骨骼的控制,实现康复训练功能的设计。
下位機系统编程开发工具采用Arduino IDE,下位机系统软件功能模块主要包括蓝牙通信模块、数据采集模块、被动控制模块、主动控制模块。
下位机系统通上电后,首先,初始化单片机的系统时钟、模数转换器(Analog-to-Digital Converter,ADC)、计数器和串口等,将角度传感器摇杆传感器输出的电压信号进行ADC模数转换,单片机将位置信号和摇杆信号通过串口发送给上位机控制系统,并实时接收上位机控制系统发送的控制指令,对接收到的指令进行判断,得到康复训练模式[3]。
4 上位机控制系统设计
4.1 上位机控制系统整体结构
上位机控制系统模块中的蓝牙通信模块,发送控制系统被动康复训练或主动康复训练控制指令给下位机系统,完成对下位机系统的控制。在被动康复训练过程中,蓝牙通信模块接收下位机系统发送的关节角度信号,判断康复训练装置是否需要进行复位操作。根据康复训练装置人机交互的功能需要,上位机控制系统软件流程如图2所示。
在主页面选择康复训练模式,蓝牙通信负责进行上下位机系统之间的数据传输。被动康复训练部分控制系统向下位机系统发送包括:肩关节内收外展运动、肩关节屈伸运动和肘关节屈伸运动训练的单关节训练模式和多关节协同训练模式、训练时间和训练暂停信号[4]。
4.2 被动控制模块
在开始训练之前,需要设置训练时间,点击“开始”按钮进行康复训练,“开始”按钮变成“暂停”按钮,被动康复训练开始。点击“停止”按钮康复训练停止。被动康复训练软件在进入被动康复训练模式时有4种训练模式可供选择,分别为肩关节内收外展、肩关节屈伸、肘关节屈伸和多关节协同。时间设置默认为5 min,可以由使用者设置。选择点击各个模式下“开始”按钮,上肢康复训练装置外骨骼各个关节自动复位,该模式开始被动康复训练,“开始”按钮变成“暂停”按钮。单击“暂停”按钮,训练暂停,“暂停”按钮变成“继续”按钮,点击“继续”按钮可继续当前倒计时时间继续训练。点击“停止”按钮,训练停止,康复装置机械臂外骨骼各个关节复位,时间设置恢复默认的5 min。
5 结语
本课题具体工作内容如下:康复装置机械结构的设计、上肢康复训练控制系统下位机系统的设计、上肢康复训练控制系统上位机控制系统的设计、康复训练装置实验的验证。
在目前研究的基础上,对设计的上肢外骨骼康复训练装置进行加工制造,与三甲医院康复训练科联系,进行临床实验,验证机械机构设计的合理性与软硬件控制系统的稳定性与有效性。对软件系统的训练模块进行进一步的研究,探索更多的控制方式,包括运用脑电、肌电及肌力控制、VR眼镜控制等先进技术,增加主动康复训练方式,以提升使用者的用户体验。
[参考文献]
[1]陳以华,陶月仙.我国脑卒中患者康复护理服务模式研究现状[J].中国医疗管理科学,2016(6):49-54.
[2]朱晓莉,武秋锋,杨莎.脑卒中患者康复护理研究进展[J].内蒙古中医药,2014(7):32-34.
[3]胡永林,肖玉华,陆安民.神经松动术联合简易上肢功能训练对脑卒中偏瘫患者上肢功能的影响[J].中国康复医学杂志,2017(8):949-951.
[4]吕明.浅谈构建和谐社会与弱势群体参与体育运动[J].体育研究与教育,2010(4):22-24.
Design and development of wheel chair upper limb
rehabilitation training system based on Arduino
Tang Xuan
(Nanjing Foreign Language School, Nanjing 210008, China)
Abstract:Upper limbs have important functions in daily life. Upper limb dysfunction can seriously reduce the quality of daily life of patients. This paper designed a set of upper limb rehabilitation training device driven by stepper motor drive. The main work includes: establishing a three-dimensional model of the upper limb rehabilitation training device, designing the overall circuit of the control system using Arduino as the control chip, and setting up the control system hardware platform of the mobile upper limb rehabilitation training device, developing and writing the rehabilitation training device upper computer control system. The software finally verified the feasibility of passive rehabilitation training.
Key words:upper limb rehabilitation training device; Arduino; hardware platform; motion control system
