新型软体材料机器人技术探究
2019-10-11阮少伟
阮少伟
【摘 要】软体机器人是使用软体材料制作,结构柔软,自由度极高,易适应环境,具有良好的生物相容性,在医疗卫生、教育服务、紧急救援和智能制造等方面有广阔的应用前景。软体机器人的材料工艺和驱动结构是软体机器人功能多样性的重要来源。本文从材料和驱动结构两方面介绍了近年软体机器人的研究进展,材料方面包括了记忆合金、弹性体材料和软体电路材料,而驱动结构方面的研究进展则通过爬行机器人、蠕动机器人和昆虫仿生机器人等例子来介绍。本文还分析了软体机器人面临的主要挑战,为未来的研究方向提供了指引。
【关键词】软体机器人;软体材料;仿生
中图分类号: TP242 文献标识码: A文章编号: 2095-2457(2019)22-0040-002
DOI:10.19694/j.cnki.issn2095-2457.2019.22.016
0 前言
近5年,不断发展的仿生学和材料学为机器人技术带来了全新的研究方向。传统机器人多由合金和工程塑料等制成,杨氏模量在109-1012Pa范围,而生物组织如皮肤和肌肉的模量约为104-109Pa,比刚体材料小了1000倍以上[1]。因此,运用3D打印以及与生物组织模量相仿的柔性新材料可以做出与传统机器人不一样的软体材料机器人。这类机器人具有无限的自由度,能随意弯曲扭转甚至变形,运作过程安全柔顺,较传统机器人有更强的适应能力和更多的功能,在医疗卫生、教育服务、紧急救援和智能制造等方面有广阔的应用前景。传统机器人设计、生产和控制技术并不适用于软体机器人,软体机器人为机器人学开辟了全新的发展空间,其结构原理、材料工艺、控制方法和设计理论等方面具有巨大的研究价值。
本文介绍了软体机器人材料和驱动结构的最新研究进展,分析了软体机器人待解决的问题,为进一步研究提供了参考。
1 研究进展
1.1 材料
软体机器人的关键在于智能柔性材料的应用,这不光包括机器人主体的材料,也包含电路、电子零件以及电源的材料。不同的材料选择决定了机器人的最大负载、变形、续航以及耐用度等性能。目前制作软体机器人的主要材料有以下3种:形状记忆合金;弹性体高分子材料;高分子复合物。此外,部分柔性电子材料也开始应用。
形状记忆合金是一种在受到有限的塑性形变后,可通过调节温度使其回复到形变前状态的材料。其原理在于记忆合金独有的马氏体相变,低温时记忆合金处于可随意变化的马氏体,而当达到特定温度时,马氏体会变成具有最低能量的奥氏体状态,这时候材料的形状也会随之回复原形。形状记忆合金在一些软体机器人中用于提供动力或控制形变, Ti-Ni型是主流的材料。
弹性体高分子材料主要是橡胶类聚合物,柔软之余具有较大的弹性限度,屈服强度内的拉伸不会令其受损,其应力反应呈非线性,力学特征要用弹性系数表示,杨氏模量只能作为其硬度的參考。弹性体杨氏模量通常在0.1-10MPa,而目前用在软体机器人上的主要是聚硅氧烷、聚氨酯和聚丙烯酸酯,杨氏模量在0.1-1MPa[2]。
高分子复合物与弹性体材料的最大区别在于其通过在弹性体材料中添加导电微粒制得,具有导电、导热性。常用的导电微粒包括炭黑、片状石墨、碳纳米管、纳米银箔等,也有使用可导电聚合物如聚苯胺和聚磺苯乙烯制作的[2]。大部分导电高分子复合物都有明显的机电耦合迟滞,即无荷载时的电阻比有荷载时大,这可能是由于复合物内的导电粒子非直接相连,电导率由电子穿隧效应主导,负载时导电粒子间的距离被压缩导致更易导电[3]。
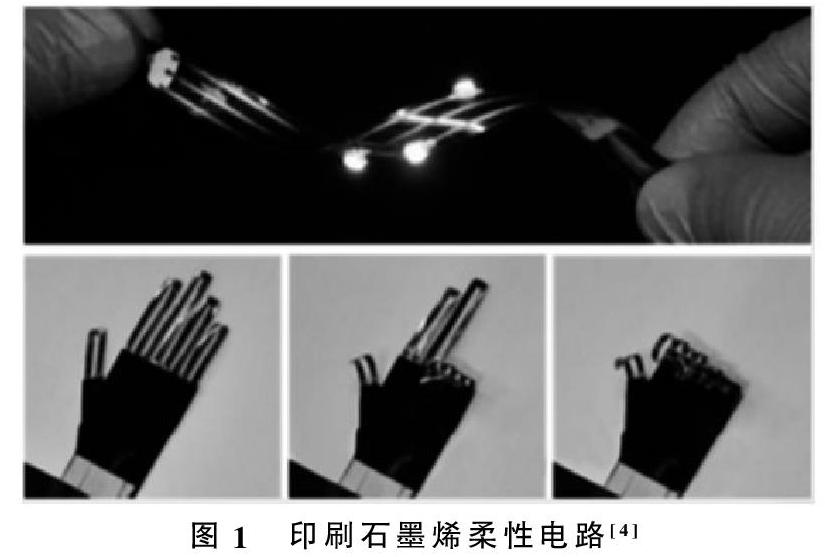
要发挥软体机器人的潜能,让探测和运算系统融合在主体中,新型智能电子材料必不可少。柔性电路是其中一种解决方案。目前柔性电路的制作技术有石墨烯印刷和诱导蒸镀(图1)[4]。此外,导电薄膜材料也在研发中, 1.77×10-6Ωm透光85%以上的可拉伸电路材料已成功制作出来[4]。
1.2 驱动结构
软体机器人的驱动结构和传统机器人完全不一样,连续形变赋予了软体机器人极大自由度,其驱动结构也因此多种多样。根据过往研究,软体机器人的驱动结构可归为三类:可伸缩筋腱;流体驱动;应激性聚合物驱动[5]。
1.2.1 可伸缩筋腱
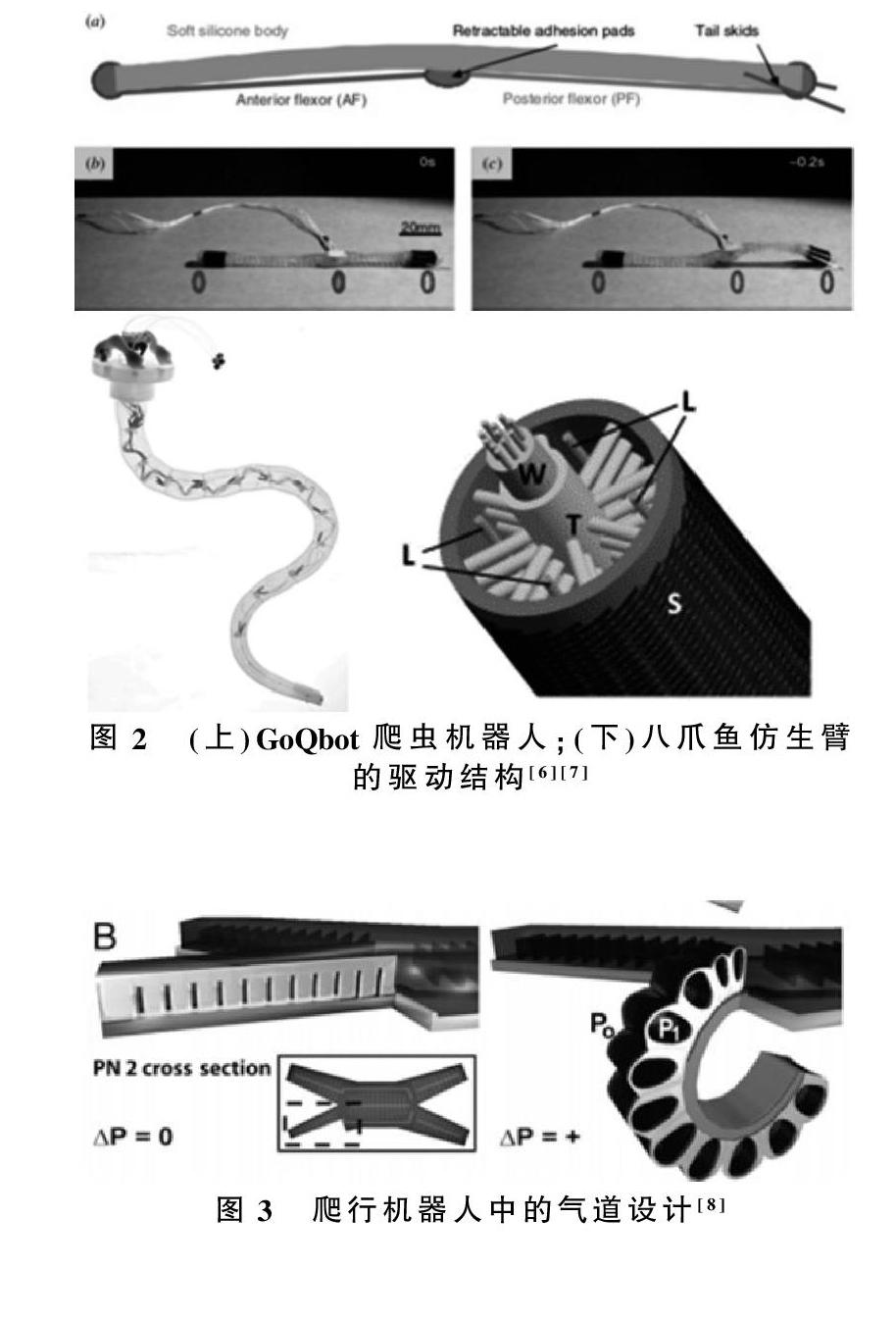
记忆合金较容易生产和编程,也能承受较大的形变,可伸缩筋腱就是由软体机器人内的记忆合金骨架组成,通过调整温度可控制机器人形变[1]。例子有GoQbot机器蚯蚓和八爪鱼仿生臂(图2)[6][7]。
1.2.2 流体驱动
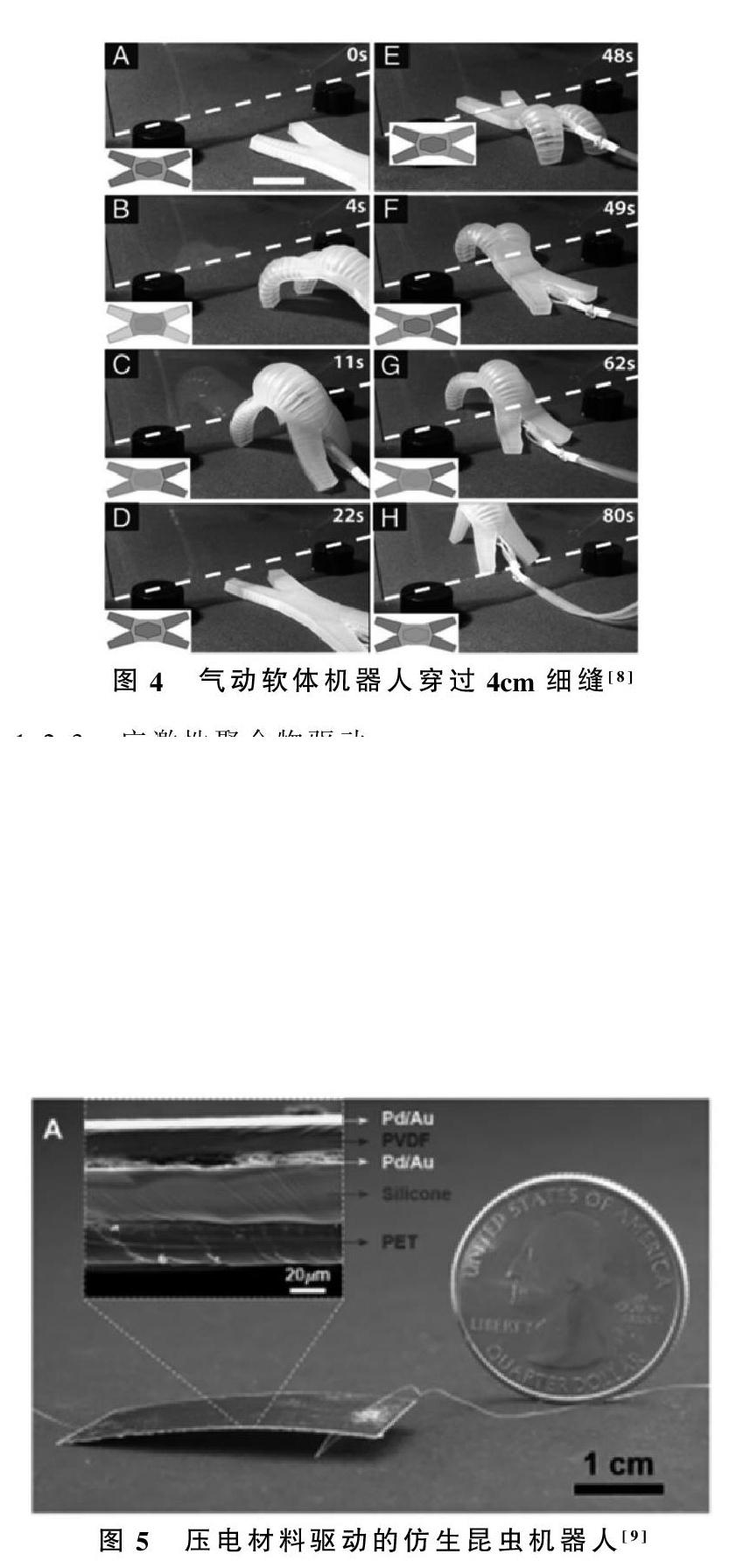
流体驱动由软体机器人内的管路组成,通过泵以流体为媒介控制机器人各部分形变实现姿态控制。爬行机器人是一个典型例子(图3)[8]。系统中的气路由一层弹性体材料和一层应变限制材料组成。加压时由于弹性系数不同,两层材料形变程度不同,使得整个气路发生弯曲,从而获得软体机器人运动所需的姿态。气路弯曲的程度可由施加的压力来控制,图4展示了机器人穿过4cm缝隙的过程,其中拱起动作压力为7psi,爬行动作压力为4psi[8]。
1.2.3 应激性聚合物驱动
应激性聚合物指在外界刺激下有功能响应的材料。调节刺激的强度能控制机器人的形变,实现姿态控制。例子有昆虫仿生机器人,该机器人由5层薄膜构成,包括两层钯-金电极,中间夹一层PVDF聚合物,此外还有一层硅胶粘合剂和一层塑料底板(图5)[9]。通过对机器人主体施加交流电,可引起PVDF薄膜的压电效应,使机器人产生伸展和收缩,从而产生驱动力[9]。
长度为25mm的PVDF驱动软体机器人在200V、200Hz条件下行走速度能达到8.7cm/s,且更小的体积和更高的驱动电压能使机器人达到更快的速度,最高可达每秒20倍自身身长[9]。
2 总结
软体机器人是一种新型的机器人,其材料工艺、结构原理、控制和驱动技术与传统机器人完全不一样,在多方面仍有待研究。新型的材料和驱动结构是软体机器人功能多样性的核心,本文介绍了目前相关研究的最新进展,包括软体机器人的主体材料:形状记忆合金、弹性体高分子材料和高分子复合物,以及可伸缩筋腱驱动、流体驱动、应激性聚合物驱动等主要驱动方式。(下转第7页)(上接第41页)
3 展望
軟体机器人的研究尚处于起步阶段,要发挥出软体机器人的潜力,需要在智能柔性材料、驱动结构等方面作进一步研究,如柔性电路、柔性电池和电子材料以及新的快速驱动结构等都可以提升软体机器人的性能,使其更柔软、具有更多功能,能更广泛由于医疗卫生、教育服务、紧急救援和智能制造等方面。
【参考文献】
[1]Lee,C.,Kim,M.,Kim,Y.J.,Hong,N.,Ryu,S.,Kim,H.J.,&Kim,S.(2017).Soft robot review.International Journal of Control,Automation and Systems,15(1),3-15.
[2]杨冠军,杨华斌,曹继敏.(2004)我国形状记忆合金研究与应用的新进展[J].材料導報,18(2),P42-44.
[3]Majidi,C.,Soft-Matter Engineering for Soft Robotics.Adv. Mater.Technol,2019,4,1800477.
[4]Invisible,stretchable circuits to shape next-gen tech(2018, February 12)[2019-08-03]https://phys.org/news/2018-02-invisible-stretchable-circuits-next-gen-tech.html.
[5]Rus,D.,&Tolley,M.T.(2015).Design,fabrication and control of soft robots.Nature,521(7553),467–475.
[6]Menciassi,A.,Gorini,S.,Pernorio,G.,Dario,P.ASMA Actuated Artificial Earthworm.IEEE International Conference on Robotics and Automation,2004.
[7]Laschi,C.,Cianchetti,M.,Mazzolai,B.,Margheri,L.,Follador, M.,&Dario,P.(2012).Soft Robot Arm Inspired by the Octopus. Advanced Robotics,26(7),709–727.
[8]Shepherd,R.,Ilievski,F.,Choi,W.,Morin,S.,Stokes,A.,Mazzeo,A.,Chen,X.(2011)Multigait soft robot.Proc Natl Acad Sci USA,108(51),20400-20403.
[9]Wu,Y.,Yim,J.,Liang,J.,Shao,Z.,Qi,M.,Zhong,J.,Luo,Z.,Yan,X.,Zhang,M.,Wang,X.,Fearing,R.,Full,R.,Lin,L.(2019).Insect-scale fast moving and ultrarobust soft robot.Science Robotics,4.eaax1594.
