多模式肘关节肌力训练装置的研制与测试
2019-10-11唐耕陈子晗李玉榕福州大学电气工程与自动化学院福州市350108福建省医疗器械和医药技术重点实验室福州市350108
唐耕 ,陈子晗 ,李玉榕 1 福州大学 电气工程与自动化学院,福州市, 350108 福建省医疗器械和医药技术重点实验室,福州市, 350108
0 引言
各种肌肉骨骼系统病损以及周围神经病损常导致患者的肌力减弱、肌肉功能障碍等,影响肢体运动功能。肌力训练就是运用各种训练模式逐步增强肌肉力量和肌肉耐力,改善肢体运动功能,同时肌力训练具有预防各种骨关节疾病及术后患者的肌肉萎缩,促进肌肉功能恢复的作用。临床肌力训练比较多的用于运动系统伤病治疗、康复治疗的早期和中期,使受损肌肉更早恢复。在膝关节手术后加大患侧股四头肌肌力训练,可以纠正膝关节周围股四头肌和腘绳肌两组肌肉肌力的不平衡,并将肌力不平衡的程度降到最低,利于膝关节功能的恢复[1]。腰背躯干肌的肌力大小同慢性下腰痛有直接关系,通过标准的躯干腰背肌的肌力训练,可以提高躯干肌腰背肌的肌力,缓解下腰痛的症状[2]。
肘关节作为参与人体上肢运动的重要关节,其运动功能的保障与人们日常生活活动能力密切相关[3]。通过医学理论的研究和临床医学的实践证明,肘关节受损患者除了早期的手术和必要的药物治疗外,正确合理的康复训练能够有效恢复和提高肢体运动功能。尽早对患者采取康复训练能够在维持患肢关节活动度、防止关节挛缩等方面起到作用,明显提高患者最终运动功能的康复效果[4]。
肌力训练有等长、等张、被动与等速四种训练模式。等长训练是指训练中肢体固定于一定角度,肌肉收缩时肌纤维长度不变,但肌张力增加,此时并不产生关节活动;等张训练是指训练中阻力恒定,肌肉收缩使肌纤维长度改变,产生明显的关节活动;被动训练是指训练中关节运动速度一旦预先设定,肢体的运动始终在某一预定的速度下进行;等速训练是指训练中关节运动速度一旦预先设定,无论训练者肌肉收缩产生多大的张力,肢体的运动始终在某一预定的速度下进行,肌肉张力大小的变化并不能使肢体产生加速或减速[5]。
目前我国肌力训练设备都依赖进口,如Cybex、Kin-con、Biodex、IsoMed等,高昂的价格和维护费用使得只有少数城市的中心医院配备,且单次使用成本居高不下。因此,研制开发成本低、适合家庭应用的多模式肘关节肌力训练装置不仅具有重要的社会意义,也具有广泛的市场前景和经济效益[6]。
1 硬件设计
本文设计的多模式肘关节肌力训练装置基本结构如图1所示。
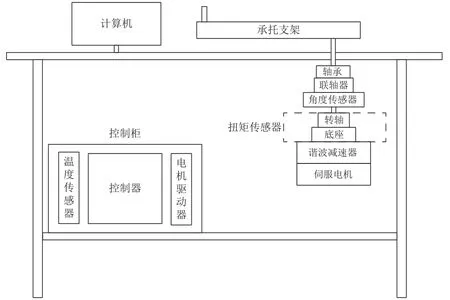
图1 多模式肘关节肌力训练装置基本结构Fig.1 Basic structure of multi-mode elbow joint muscle strength training device
本装置组成包括计算机、控制器、电机驱动器、伺服电机、谐波减速器、扭矩传感器、联轴器、轴承、承托支架、温度传感器、角度传感器。其中,电机驱动器、控制器、温度传感器安装在控制柜内。扭矩传感器分为底座和转轴,底座通过谐波减速器与伺服电机连接,承托支架通过联轴器和轴承与转轴固定连接,肘关节通过承托支架带动转轴运动,扭矩传感器通过转轴和底座之间产生的相对运动来测量肘关节力矩。谐波减速器体积小,减速比大,用于放大伺服电机输出转矩。温度传感器用于检测控制柜内温度,保护装置。角度传感器安装于扭矩传感器上方,利用磁性编码器原理检测承托支架角度。
系统控制器选用myRIO-1900,该控制器是一种用来设计控制、机器人和机电一体化系统的便携式可重配置I/O的嵌入式设备,使用LabView编程,能提供数字、模拟输入和输出以及音频和电源输出,并且能通过USB连接到主机。
电机驱动器选用ESCON 50/5,该伺服驱动器是脉宽调制控制器。首先通过全桥整流电路进行整流,得到相应的直流电,再经过PWM逆变器变频来驱动伺服电机。
谐波减速器选用Harmonic,CSF-17-100-2UHLW,该谐波减速器是靠波传动发生器装配上柔性轴承使柔性齿轮产生可控弹性变形,并与刚性齿轮相啮合来传递运动和动力的齿轮,用于放大伺服电机的输出转矩[7]。
扭矩传感器选用TQ-664F1,该扭矩传感器采用应变片电测技术,在弹性轴上组成应变桥,向应变桥提供电源即可测得该弹性轴受扭的电信号,将该应变信号放大后,经过压/频转换,变成与扭应变成正比的电压信号[8]。
温度传感器选用LM35D,该温度传感器输出电压与摄氏温度成比例,灵敏度10 mV/oC,工作温度为0~100oC,精度±1oC。
角度传感器选用AS5048A,该角度传感器通过磁电阻效应将变化着的磁场信号转化为电阻阻值的变化,在外加电势的作用下,变化的电阻值转化成电压的变化,经过后续信号处理电路的处理,模拟的电压信号转化成计算机可以识别的数字信号,实现角度测量功能[9]。
多模式肘关节肌力训练装置信号连接关系,如图2所示。
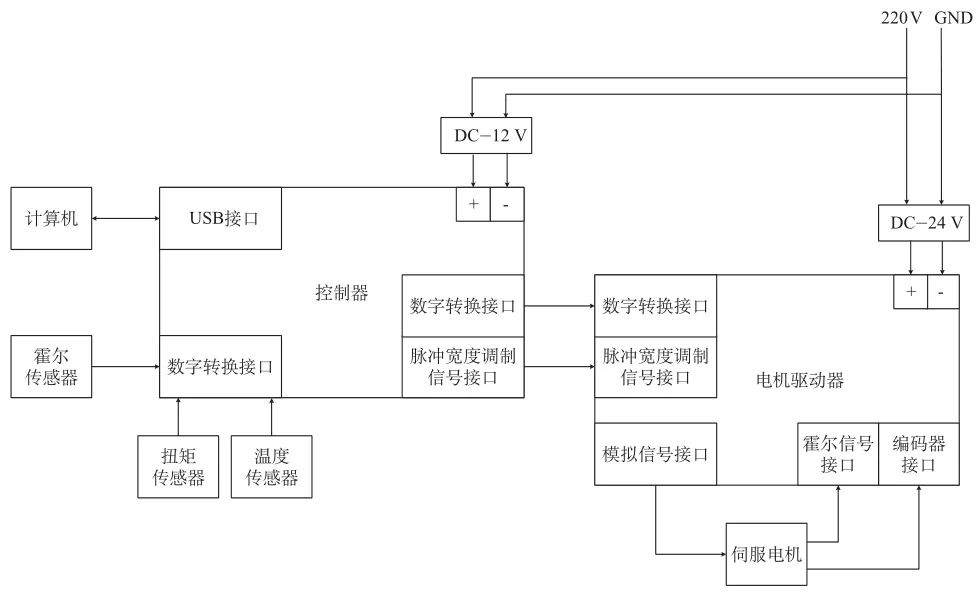
图2 多模式肘关节肌力训练装置信号连接关系Fig.2 Signal connection of multi-mode elbow joint muscle strength training device
2 程序设计
2.1 命令参数设计
在设计多模式肘关节肌力训练装置时,需要设置帮助、启停参数、运动模式、电机方向和训练速度等命令参数来控制装置的运行,命令参数以(帧头-命令类型-参数数值-帧尾)的字符串形式发送,帧头和帧尾分别为5aa5和3cc3。还需要对命令的长度和帧头以及帧尾的完整进行综合判断来确定命令的真伪,然后将字符串中的命令类型和命令参数分别读取并存储。
2.2 上传参数设计
在设计信号采集模块时,扭矩信号和角度信号不可或缺。另外,为了延长硬件使用年限即肌力训练装置的使用寿命,对硬件运行时的监控温度也十分注重。因为扭矩、温度和角度都是从传感器中获取并最终上传,于是将其统称为上传参数,上传参数是以(上传数据类型 上传参数)的字符串格式发送。
(1)温度信号采集模块
从串口读取温度传感器的输出电压信号,由于输出电压与摄氏温度呈线性比例关系,对电压信号乘以100即可获得摄氏温度。
(2)角度信号采集模块
关闭角速度传感器的片选信号Csn,由于Csn变低电平信号,SPI被激活,程序读取角度传感器输出信号,并转化为角度值:

角度传感器测量精度为13位,测量范围为-180o~180o,XA是角速度传感器输出的13位数字量,A是为了仪器校零而添加的补偿常量角,通过多次试验测试,设置为-174.4o,利用中值滤波器使角度值平稳输出,最后开启片选信号Csn,由于Csn变高电平,程序停止读取角度传感器输出信号。
(3)扭矩信号采集模块
从串口读取扭矩传感器的输出电压信号UT,并对输出的电压信号进行滤波,电压信号通过设计的采样频率为100 Hz、低通截止频率为20 Hz的5阶Butterworth滤波器来使扭矩传感器输出电压信号平稳,然后通过电压范围0~10 V和扭矩测量范围0~±50 N.m将滤波后的电压信号转换为扭矩值以及因为扭矩的正负性,将扭矩值减50 N.m来确定扭矩的零点,另外还需要零漂移补偿扭矩值B来补偿转换后的扭矩值来使得扭矩传感器的扭矩校准为零(TQ-664F扭矩传感器的零漂补偿扭矩值B为0.5%)。

3 伺服控制系统及控制算法
伺服电机具有位置伺服、速度伺服、转矩伺服三种控制方式,本肌力训练装置采用速度伺服控制方式。速度伺服控制系统如图3所示。通过闭环控制,保证电机转速不变。负载增大时,电机输出力矩增大;负载减小时,电机输出力矩减小[10]。

图3 速度伺服控制系统Fig.3 Speed servo control system
被动训练模式下,肌力训练装置通过承托支架带动训练者肘关节以恒定速度在指定范围内运动。
等速训练模式下,肌力训练装置提供的阻力矩是一种自适应性力矩,始终与训练者肌肉收缩产生的肘关节主动力矩相等,维持训练速度不变。
等长训练模式下,肌力训练装置使承托支架固定在训练者指定位置。
等张训练模式下,训练者训练前设置阻力矩大小,开始训练时,肌力训练装置输出所设置的恒定阻力矩,由训练者肘关节带动承托支架运动。运动过程包括加速运动和减速运动两个阶段:
(1)加速运动:由训练者主动驱动肘关节转动,通过设定阻力级别实现肘关节带动伺服电机运动的难度调整。
(2)减速运动。当肘关节与装置交互力突然降低,即人手离开设备时,装置应稳定较快地减速至停止。
4 实验测试
多模式肘关节肌力训练装置实物,如图4所示。

图4 多模式肘关节肌力训练装置实物Fig.4 Actual item of multi-mode elbow joint muscle training device
多模式肘关节肌力训练装置主控界面如图5所示。
在主控界面上点击开始按钮进行康复训练,点击停止按钮结束康复训练;可以选择被动、等速、等张、等长等四种康复训练模式;可以设置承托支架转动角度(-120o~ 120o)、阻力级别、训练速度;可以显示实时角度—时间、速度—时间、扭矩—时间曲线和控制柜内温度。
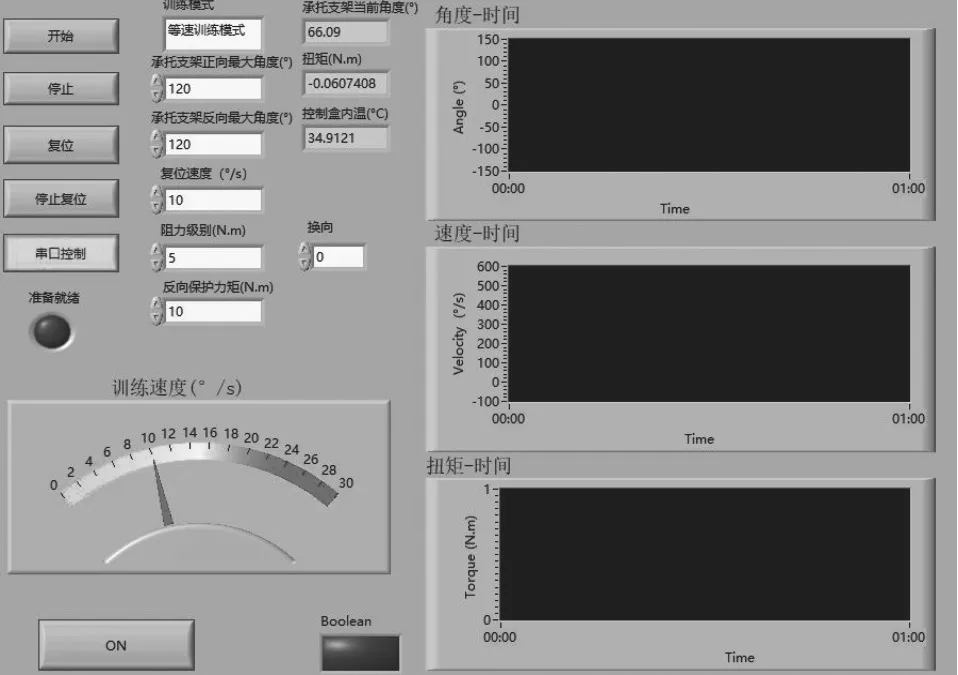
图5 多模式肘关节肌力训练装置主控界面Fig.5 Control interface of multi-mode elbow joint muscle training device
4.1 被动训练模式测试
设置承托支架转动角度为-120o~ 120o,分别在设定训练速度为4o/s、12o/s、20o/s、28o/s的条件下测试,承托支架速度波动率分别为6.7%,4.8%,4.6%和3.8%;在常用设定速度范围(0~30)o/s内,速度波动在7%以内,符合被动康复训练装置要求。
4.2 等速训练模式测试
设置承托支架转动角度为-120o~ 120o,分别在设定训练速度为4o/s、12o/s、20o/s、28o/s的条件下测试,承托支架速度波动率分别为7%,6.3%,5.8%和5%;在常用设定速度范围(0~30)o/s内,速度波动率不超过7%,符合等速康复训练装置要求。
4.3 等张训练模式测试
设置阻力级别为4 N.m、6 N.m、8 N.m、10 N.m的条件下进行测试,当训练者肘关节作用力大于设定阻力级别时,训练者肘关节带动承托支架加速运动;当训练者肘关节作用力小于设定阻力级别时,训练者肘关节带动承托支架减速运动,符合等张康复训练装置要求。
4.4 等长训练模式测试
设置训练角度设定值为20o、40o、60o、80o的条件下进行测试,当承托支架到达训练角度设定值后,保持静止,可以实时显示训练者肘关节力矩值,符合等长康复训练装置要求。
5 结论
通过LabView为上位机界面控制伺服驱动器、伺服电机,实现具有被动、等速、等长与等张四种训练模式的康复训练装置,主要参数满足要求,训练者体验良好。下一步主要对装置启动摩擦力较大等机械方面的问题进行研究和改善。
