无人机自组网典型场景构建及路由协议性能分析*
2019-10-09董强健赵海涛郑超轶王海军
董强健,赵海涛,郑超轶,王海军
(国防科技大学 电子科学学院,湖南 长沙 410073)
0 引 言
无人机相对于有人机具有性能优越、造价低廉和减少伤亡等优点,在民用和军事领域得到了高度重视。多架无人机组成无人机集群协同执行任务是未来军用无人机的重要发展方向,可以完成渗透侦查、诱骗干扰、察打一体以及协同攻击等任务[1]。
无人机集群通信方式为移动自组织网络(移动Ad Hoc网络)。作为移动网络节点,无人机之间通信无需基础通信设施,具有网络独立工作和健壮性高的优点。路由协议是移动Ad Hoc网络的应用难点和研究热点,平面结构的路由协议可分为表驱动路由协议和按需路由协议2大类。对于表驱动路由协议,每个节点存储到本网络中其他所有节点的路由表,周期性地交换路由信息更新路由表,典型的表驱动路由协议有DSDV、WRP和OLSR等。按需路由协议只有节点需要通信时才建立路由,典型的路由协议有AODV、DSR和TORA等。
大量无人机自组织网络的关键技术已经突破,但其评价准则还不够成熟。现存的路由协议有数十种,不同协议适用于不同场景,在具体应用场景中选择最佳协议需要进行仿真评估。文献[2]对2类路由协议在不同节点数量和移动速度的场景中进行了仿真分析。文献[3]采用随机路点运动模型对4种路由协议6类项参数进行仿真分析。但是,这些仿真分析侧重于理论研究,仿真场景缺少实战化特征。本文对战场环境进行建模,将战场环境分为友好型、障碍型和对抗型,通过OPNET网络仿真软件设置相应场景,对AODV、DSR以及OLSR共3种典型路由协议进行仿真,分析不同场景中每种协议的性能,对装备研发具有借鉴意义。
1 无人机集群发展现状
2015年以来,我国和美国进行了一系列无人机集群飞行试验。这些无人机集群项目直接面向未来战场,经过了反复论证和实验,其参数设置对场景建模具有借鉴意义[4]。
2015年8月,美国国防高级研究计划局(DARPA)宣布启动“小精灵”(Gremlins)项目,计划从敌方防御范围外大型飞机上发射可回收的小型无人机集群,发射平台具备发射超过20架无人机的能力。2018年4月,DARPA宣布该项目已经进入飞行试验阶段。
2015年5月,美国海军研究办公室(ONR)开展了LOCUST项目研究,使用“郊狼”(Coyote)小型无人机进行试验,其巡航速度约为111 km/h。这种变体无人机由管状装置发射,在空中展开机翼自主飞行。2016年2月在陆上完成30 s内发射30架“郊狼”无人机的试验。
美国国防部战略能力办公室(SCO)主导“山鹑”(Perdix)微型无人机高速发射演示项目,2017年1月,美国海军3架F/A-18F“超级大黄蜂”战斗机投放了103架山鹑无人机。
2018年5月,中国电子科技集团公司完成200架固定翼无人机集群飞行试验。2018年1月,国防科技大学试验了20架固定翼无人机自主作战。
2 3种代表性路由协议
无人机自主网已经由理论研究进入装备研制试验阶段,其中路由协议选择是必须面对的问题。IETF工作组提出了多种移动自组网路由算法草案,但是没有任何一种路由算法能够很好地适用于所有的应用环境。每种路由算法仅仅是在算法机制本身所提出的情况下达到一种局部最优。根据路由协议的研究,选择具有代表性的AODV、DSR以及OLSR共3种路由协议进行仿真。
AODV协议是按需路由协议,当发现多条路由时,源节点选择跳数最少的路由。AODV协议采用逐跳转发分组的方式,数据分组不需要携带完整的路由信息,通过中间节点实现对路由表的建立与维护。
DSR协议也是按需路由协议,每个报文分组都携带从源节点到目的节点的完整路由信息。当发送分组无法到达目的节点时,分组将被保存在转发节点的发送缓存中;当缓存时间大于规定的时间,该分组将会被丢掉。
OLSR协议是表驱动路由协议,每个节点只选择必要的中继节点,链路状态信息只描述与中继节点之间的链路,减小了由于信息泛洪带来的路由开销。
3 无人机集群应用场景构建
为了选择实战环境中性能最佳的路由协议,需要建立符合实战特征的仿真场景。文献[5]对节点移动模型进行仿真研究,选取的3种移动模型体现了随机性,侧重于理论研究。受到自然规律和执行任务的限制,无人机集群运动有特定的规律。本文对战场特征进行抽象分析,将战场环境分为友好型、障碍性以及对抗型3类典型场景。其中,友好型场景为理想化场景,障碍型场景为存在障碍的真实自然环境,对抗型场景为同敌方发生交战存在敌我对抗的环境。
3.1 3类典型场景
友好型场景对应情景为无人机发射后保持间距飞行。场景为理想环境,地形平坦开阔地,没有突出障碍物,没有敌我对抗。
障碍型场景对应情景为野战自然环境,地形复杂,存在自然或人工障碍。无人机躲避障碍时机群拓扑结构会发生变化,障碍两侧无人机通信链路会断开。
对抗型场景对应情景为无人机集群到达敌方阵地变换队形执行侦察或攻击任务,遭到敌方反击后部分无人机损毁。无人机变换队形时,网络拓扑会发生变化,在部分无人机损毁后节点数量减少。这些情景会对无人机通信产生影响。
3.2 仿真场景设置
使用网络仿真软件OPNET14.5进行仿真,对应3类典型场景设置了5个仿真场景。为了使场景设置更贴近实战,仿真参数设置综合考虑了任务需要和无人机性能,并借鉴了“小精灵”“郊狼”和“山鹑”等相关无人机集群试验项目已经公开的参数。表1为仿真场景参数。
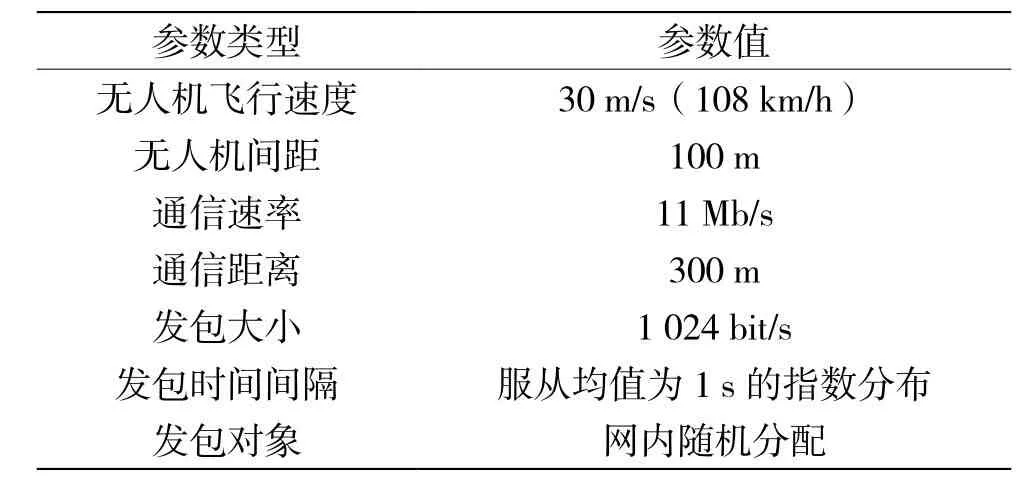
表1 仿真场景参数
OPNET仿真设置的5个仿真场景依次为一路依次发射、三路并行发射、两组绕飞避障、搜索合围目标和部分飞行损毁,分别对应图1(a)至图1(e)。其中,前两个场景为友好型场景,“两组绕飞避障”为障碍型场景,最后两个场景为对抗型场景。
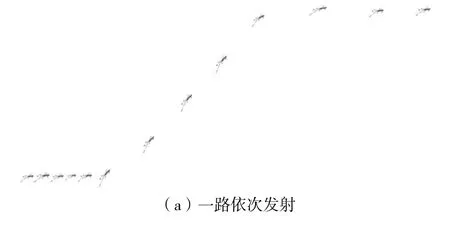
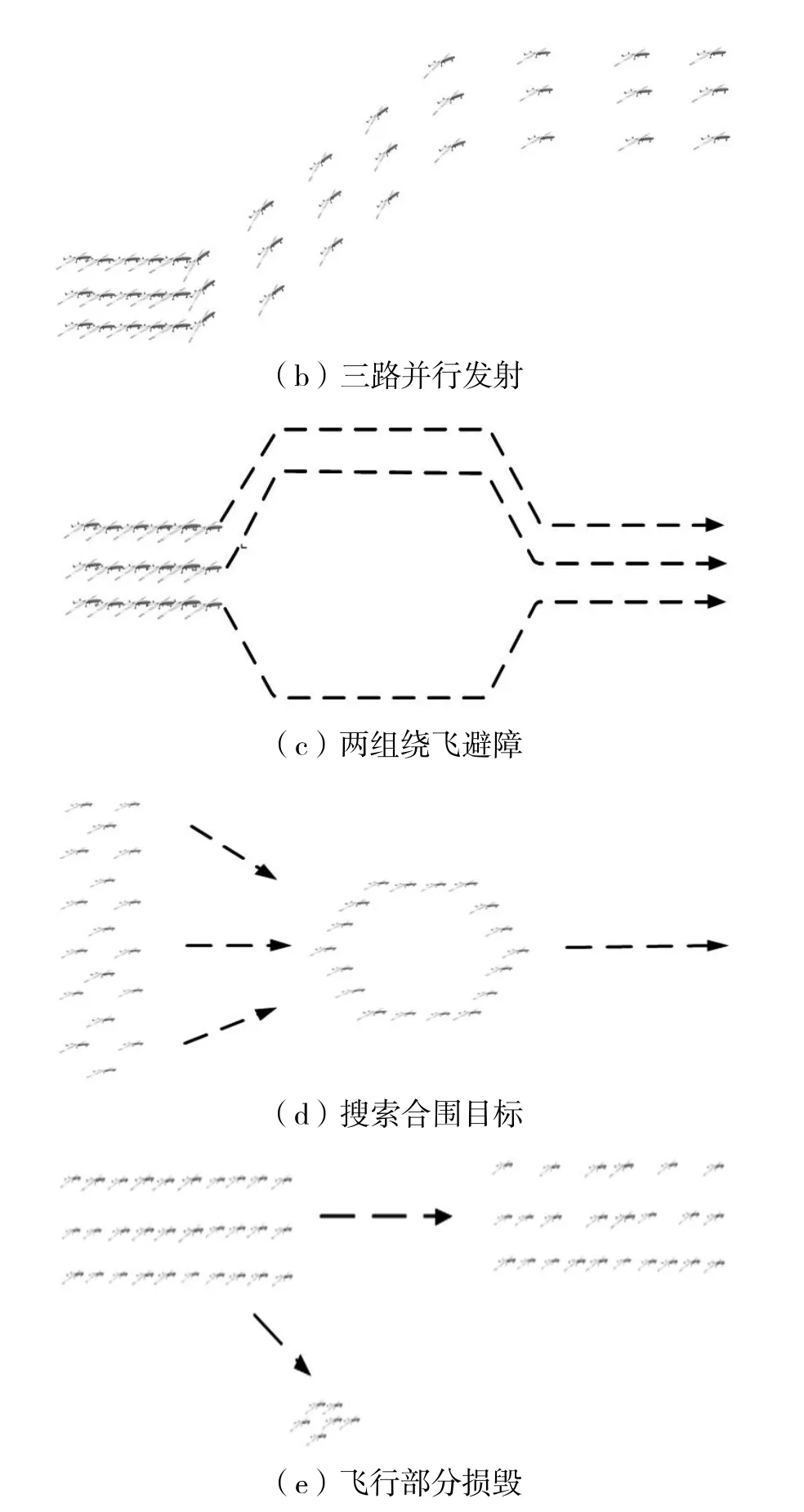
图1 OPNET仿真场景
4 路由协议仿真与结果分析
仿真统计量选取端到端时延、投递率和网络负载,每种场景进行10次仿真取平均值。投递率为接收数据包与发送数据包比值,取值在0到1之间。图2~图6是3种路由协议在5个场景中的仿真结果。
4.1 一路依次发射
图2为“一路依次发射”场景的仿真结果。第5分钟至第6分钟为依次发射阶段,30架无人机间隔2 s逐架发射,拓扑发生变化;第6分钟至仿真介绍为平稳飞行阶段,等间距匀速飞行,拓扑结构稳定。从图2可以看出,在依次发射阶段,3种协议端到端时延都在增加,网络负载也在增加,DSR协议和OLSR协议投递率在下降,AODV协议投递率在上升,显示了AODV对拓扑变化环境的良好适应性。在平稳飞行阶段,统计量趋于稳定,端到端时延OLSR协议最小,AODV协议相对较大,OLSR协议和DSR协议投递率接近于1,网络负载OLSR协议最小,AODV协议较大。综合判断,在依次发射阶段应采用AODV协议,在平稳飞行阶段应采用OLSR协议。
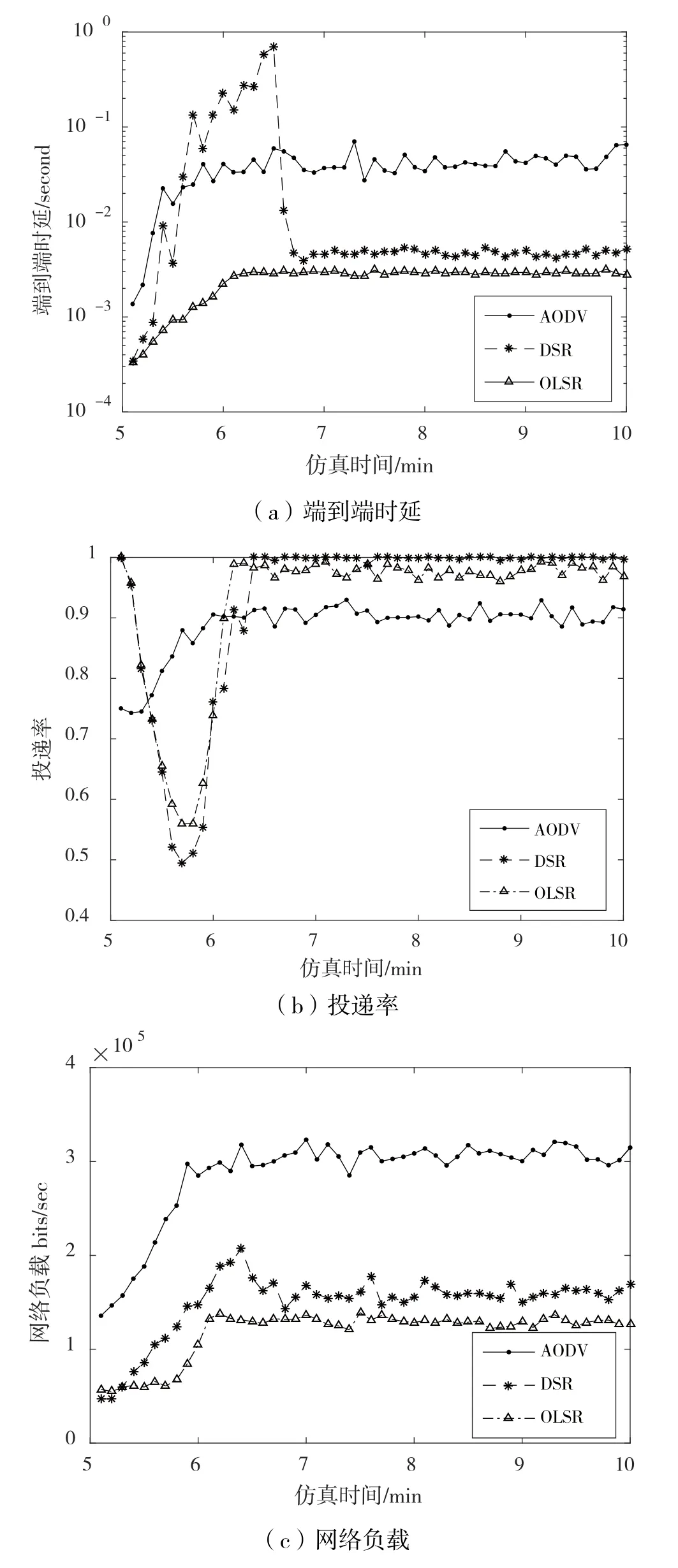
图2 “一路依次发射”场景仿真结果
4.2 三路并行发射
图3为“三路并行发射”场景的仿真结果,发射过程同“一路依次发射”场景相似,但是每次同时发射3架无人机,无人机数量增多带来协议性能发生变化。
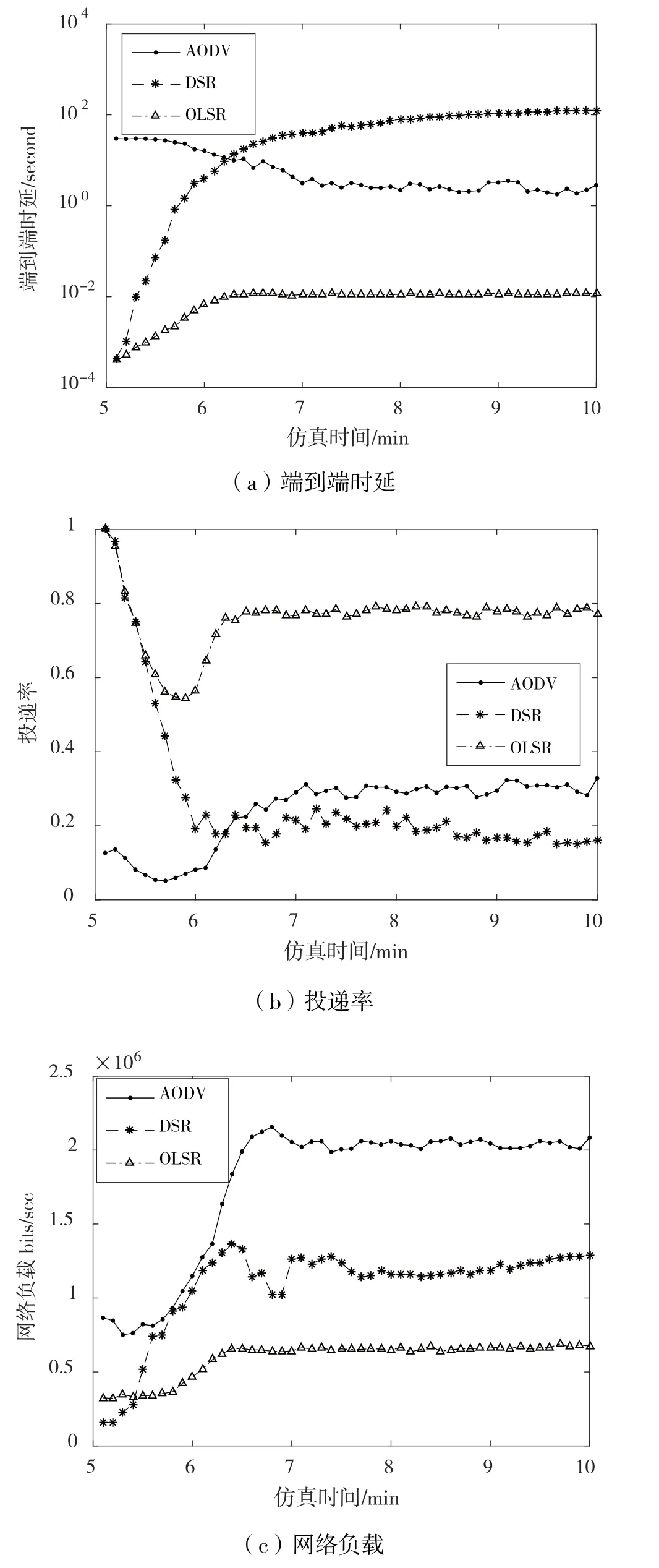
图3 场景“三路并行发射”仿真结果
在并行发射阶段,DSR端到端时延急剧上升,投递率迅速下降。对于DSR协议,拓扑发生变化,数据包无法到达目的地时,中间节点会将数据包存储在数据缓存中。数据在缓存中排队会增加延时,超过重传次数数据包会被丢弃,导致投递率下降。在平稳飞行阶段性能也很差。在整个仿真过程中,AODV协议端到端时延非常大,投递率很低,已经无法满足正常通信要求。综上,无人机数量较多、密度较大时,DSR协议和AODV协议性能恶化,OLSR协议性能较好。
4.3 两组绕飞避障
图4为“两组绕飞避障”场景仿真结果。第5分钟至第7分钟为绕飞避障阶段,30架无人机分为两组在障碍两侧飞过,两组无人机之间不能通信。第7分钟至仿真结束为合并飞行阶段。在绕飞避障阶段,两组无人机之间不能通信,发送给另外一组的数据包无法收到,投递率较低。在DSR协议中,当数据包不能到达发送目标时,中间节点会将发送数据包存储在缓存中,导致端到端时延迅速增加,中间节点反复重传缓存数据包,网络负载增大。在合并飞行阶段,无人机为准静止状态,OLSR协议性能较好。整体而言,在该场景中应使用OLSR协议。


图4 场景“两组绕飞避障”仿真结果
4.4 搜索合围目标
图5为“搜索合围目标”场景仿真结果。
第5分钟至第6分钟为队形变换阶段,30架无人机执行任务搜索到目标后由横队变换为正六边形,第6分钟至仿真结束为合围飞行阶段。在队形变换阶段,3种协议投递率均有下降,网络负载有上升。相较而言,OLSR性能更好。在合围飞行阶段,无人机拓扑结构稳定,DSR协议与OLSR协议端到端时延及网络负载相近,但DSR协议投递率更大。整体而言,在队形变换阶段应采用OLSR协议,在合围飞行阶段应采用DSR协议。
4.5 部分飞行损毁
图6为“部分飞行损毁”场景仿真结果。第3分钟至第5分钟为完好飞行阶段,30架无人机编为4路纵队匀速飞行,从第5分钟至第8分钟为损毁飞行阶段,6架无人机损毁停止飞行和通信。
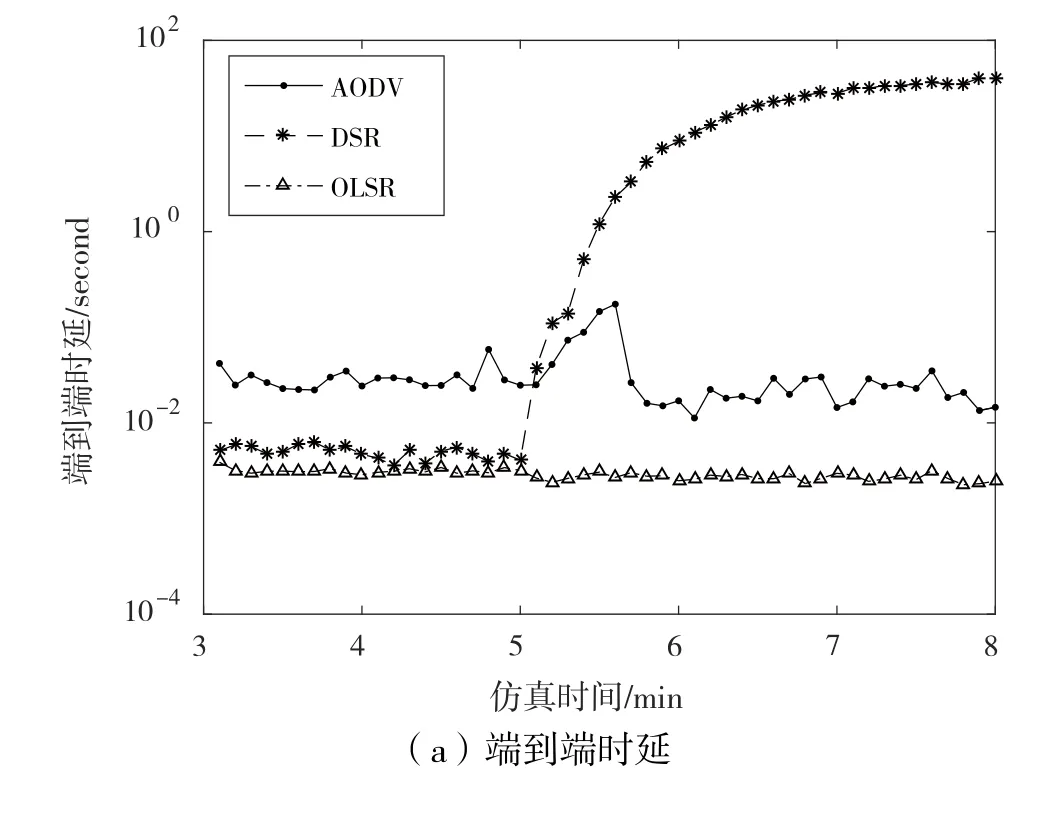
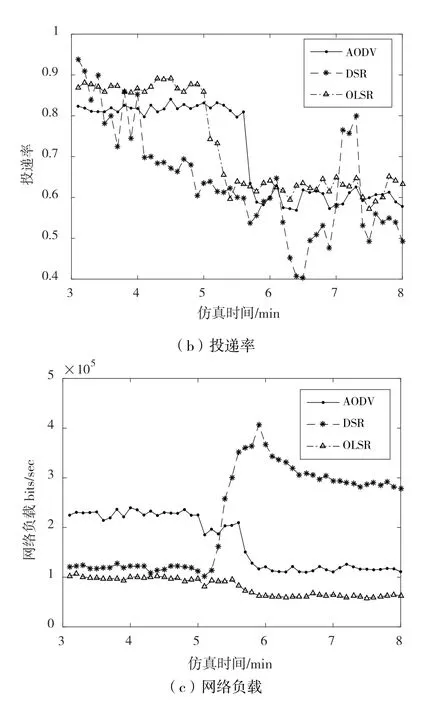
图6 场景“部分飞行损毁”仿真结果
在完好飞行阶段,无人机处于正常通信状态,协议性能类似于无人机准静止状态。在损毁飞行阶段,损毁的无人机不能接收数据包并回复源节点,DSR协议对不能找到目的节点的数据包进行缓存并不断重复发送数据包,端到端时延和网络负载迅速上升。相对而言,OLSR协议性能较好。综上,在该场景中应采用OLSR协议。
5 结 语
本文对无人机集群应用的战场环境进行分类,在OPNET仿真软件中设置无人机集群执行任务的5个场景,对移动自组织网络的3种典型路由协议进行仿真,并对仿真结果进行分析。从仿真结果可以看出,在无人机集群执行任务的不同阶段,3种路由协议有不同表现,应该根据当时场景类型特点选择相适应的路由协议。总体上看,在拓扑结构变化场景中用AODV协议性能较好,在无人机间相对位置固定时用OLSR协议性能较好。无人机集群决策系统在改变飞行状态或拓扑结构的同时切换相适应的路由协议,为无人机集群执行任务提供了更好的通信保障。