基于图像增强技术的SURF 特征匹配算法研究
2019-10-09张明浩杨耀权靳渤文
张明浩,杨耀权,靳渤文
(华北电力大学 控制与计算机学院,保定071003)
图像匹配技术是图像处理中的一项重要技术。其目的是对2 个或者多个图像的特征纹理、内容等因素进行分析并匹配。 对点特征的匹配是图像匹配中的一个基本方法。 其中,SIFT 算法是特征点匹配领域中具有里程碑意义的算法, 但SIFT 算法构建128 维特征向量降低了运算速度。 而SURF 算法在匹配速率上有所提升,是对SIFT 的改进算法,为算法在实时计算机视觉系统中应用提供了可能[1]。
除此,由于受拍摄或环境等问题,可能会出现图像亮度不均、对比度低、噪声多等情况,为后续研究带来不便。 SURF 特征匹配在光照良好的情况下匹配效果很好,当光照不足或曝光过度情况下匹配不足。 利用图像增强技术对图像进行预处理,使图像中物体与背景之间的对比度更强,突出图像中的某一部分, 使得这一部分的细节变得更加清晰,从而有利于更进一步的观察与分析。
在上述基础上, 本文提出将图像增强技术与SURF 算法相结合的思想, 预先使用不同的图像增强方法进行处理,通过实验验证结合图像增强技术后的SURF 算法对特征提取与匹配的改善[2]。
1 SURF 算法原理
相比于SIFT 算法,SURF 算法更快且鲁棒性更好。 因为该算法在保证正确匹配的前提下做出了相应的简化,同时多次采用积分图像,因其计算简单且根据积分图像易得到图像任何矩形域灰度值,大大的提高了效率。并且采用Haar 小波变换增加鲁棒性[3]。
1.1 局部特征点提取
1.1.1 构建Hessian 矩阵
通过构建Hessian 矩阵生成图像稳定的边缘点,从而为特征提取做基础[4]。 一副图像f(x,y),其Hessian 矩阵可表示如下:
在构建矩阵前需要对图像进行高斯滤波,经滤波后的Hessian 矩阵为

通过Hessian 矩阵的判别式定位关键点位置。当取得局部极大值时,判定当前点是比周围邻域内其他点更亮或更暗的点[3]。
1.1.2 构建尺度空间
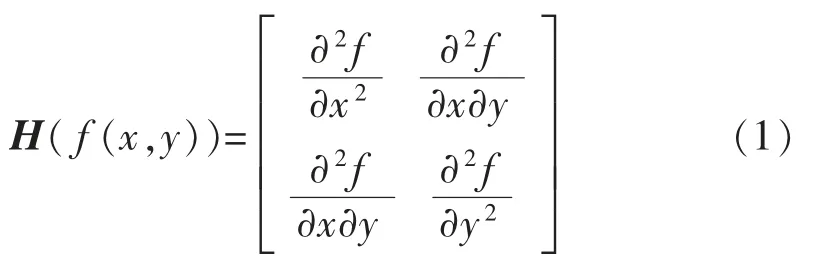
构建图像尺度空间,是指从不同尺度上对图像特征进行检测,目前比较好的方法是通过建立图像金字塔对图像进行多尺度描述。 传统方法使用生成的高斯金字塔中同组的上层图像减下一层,从而获取高斯差分图像,依赖上层结果,高斯模板不变但是改变图像大小,降低运算效率。 而在SURF 中,依靠盒式滤波器而非高斯模板,因此可以不改变图像的大小,仅通过改变盒式滤波器的模板尺寸来实现尺度不变性, 同时提高了算法速度和精度。 如图1所示。
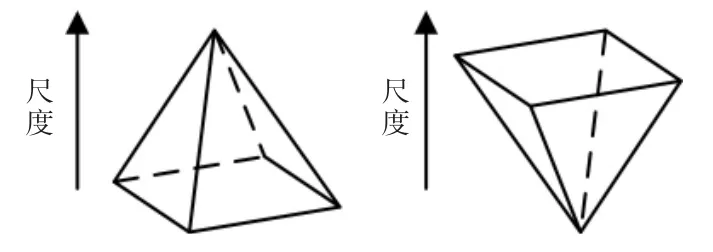
图1 金字塔结构Fig.1 Pyramid structure
1.1.3 特征点定位
此过程共分3 个步骤:选取阈值、进行非极大值抑制以及插值。
首先选取阈值,保留最强的响应值,当选择的阈值越大则特征点越多。 然后式非极大值抑制,将经Hessian 矩阵处理的每个像素点与尺度空间的8个邻域像素比较,还要与邻近尺度空间的分别9 个邻域像素比较,共26 个像素点,不包括第一层与最后一层图像,如图2 所示。 最后通过泰勒级数来进行插值计算,初步定位出关键点,过滤掉定位错误或者能量差的关键点进而筛选出稳定的特征点[4]。
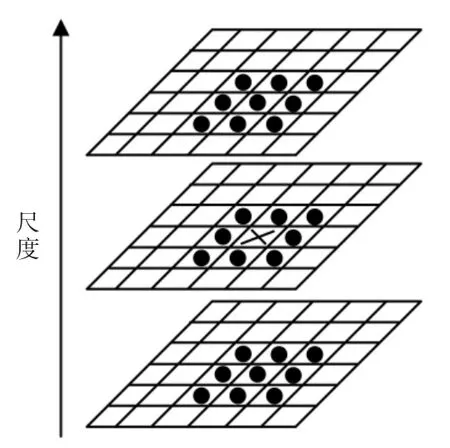
图2 特征点定位Fig.2 Feature point positioning
1.1.4 特征点主方向分配
SURF 算法中,采用特征点邻域内的Haar 小波特征。 以特征点为中心,计算半径为6 s 圆形区域响应, 计算60°扇形范围内所有点的水平和垂直特征响应之和,形成新的矢量,遍历整个圆形区域,最后将最长的新矢量方向作为该特征点的主方向[4]。 该过程示意图如图3 所示。
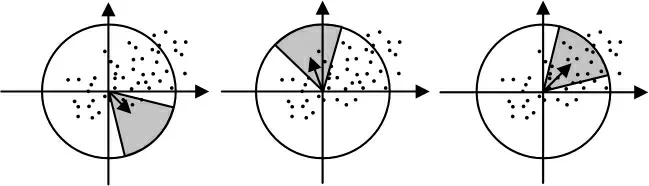
图3 特征点主方向求取过程Fig.3 Feature point main direction seeking process
1.2 生成特征点描述子
在SURF 算法中, 在特征点附近沿主方向采用4×4 矩形块。 计算各个子区域内25 个像素的Haar小波特征。 这4 个值分别为各个子块区域的特征向量,因此SURF 特征描述子共64 维向量,其比SIFT特征描述子小2 倍[5]。
1.3 特征点匹配
通过计算2 个特征点间的欧式距离来确定匹配度,欧氏距离越短,代表2 个特征点的匹配度越好。 通过Hessian 矩阵迹的判断,如果2 个特征点的矩阵迹正负号相同,代表这2 个特征具有相同方向上的对比度变化,如果不同,说明这2 个特征点的对比度变化方向是相反的,即使欧氏距离为0,也直接予以排除[4]。
2 RANSAC 精匹配
RANSAC 算法中指出,有效数据称之为“内部点”, 即有效数据的分布可以用一定的模型参数来解释,而不能契合该模型的无效数据则称之为“外部点”。 利用内部点数据对参数进行估计,以便删除不准确的数据。 此过程需用迭代方式估计参数。
为改进SURF 特征点之间的匹配正确率, 选择RANSAC 算法来对匹配点进行筛选。 选择内点数量最多时对应的变化矩阵为最佳估计变换矩阵,同时相应的内点即为提纯后的匹配点对[6]。
3 图像增强算法
图像增强是指有目的增强图像有用信息,改善图像质量,加强效果。 使处理后的图像比原始图像更适用。 本文使用Gamma 变化、直方图均衡化以及图像锐化等方法来进行图像增强处理,并利用曝光不足或过曝光的情况验证各种方法的适用场合。
3.1 Gamma 变换
Gamma 变换可以对图像进行矫正[7],适用于曝光不足或者过曝光的图片, 可以增强图像的对比度。 Gamma 变换的公式如下:

一般情况下,Gamma 变换是通过改变伽马值,来对高光部分或暗调部分扩展,以增强这些部分细节。 经Gamma 变换后的关系图如图4 所示。
Gamma>1 时,亮区灰度拉伸,暗区灰度压缩,整体图像变暗;

图4 输入输出灰度值关系Fig.4 Input and output gray value relationship
Gamma<1 时,亮区灰度压缩,暗区灰度拉伸,整体图像变亮。
3.2 直方图均衡化
对于图像灰度值分布过于集中的情况,直方图均衡化可将图像灰度概率分布变均匀,使图像的直方图尽可能的平稳。 变换如下:

变换函数T(r)与原图概率密度函数的关系为

离散形式如下:
经多次变换得到均衡化处理的图像。
3.3 图像平滑
图像噪声是指图像中不必要的或者多余的干扰信息,表现形式为在图像中形成突变效果的一系列孤立的像素区域,干扰图像的可观测信息。 图像平滑从信号处理的角度看就是去除其中的高频信息,保留低频信息,从而达到减少图像中噪声的目的[8]。
3.4 拉普拉斯算子法
拉普拉斯算子又叫做二阶微分线性算子,假设图像为f(x,y),则其拉普拉斯算子为

将二阶偏微分近似可得到用于图像锐化的拉普拉斯算子:

最终的锐化公式为
3.5 同态滤波
同态滤波对图像灰度范围进行调整,通过消除图像上照明不均的问题增强暗区的图像细节,同时又不损失亮区的图像细节[9]。
一副图像能用它的入射光分量和反射光分量来表示,关系式如下:

此方法要用同一个滤波器来实现对入射分量和反射分量的理想控制,关键是选择合适的H(x,y),对图像的低频和高频分量有不同的影响,因此称之为同态滤波,如图5 所示。

图5 同态滤波器滤波函数的剖面Fig.5 Profile of the homomorphic filter function
4 算法实验结果与分析
在自然条件下, 光照对采集图像具有很大影响,不同光照条件可能导致图像曝光不足或过曝光的情况影响质量, 为后续匹配等研究带来不便,图像增强技术是对图像进行处理以提升图像质量因此分别采用不同图像增强方法来对质量缺陷的图像进行处理, 进而再利用本文所改进的SURF 算法进行特征匹配,并用特征点数、匹配点数量、运行时间来衡量优劣。
首先选取2 幅曝光不足图像实验,见图6、图7及表1。
图6 光不足原图Fig.6 Underexposed original photo
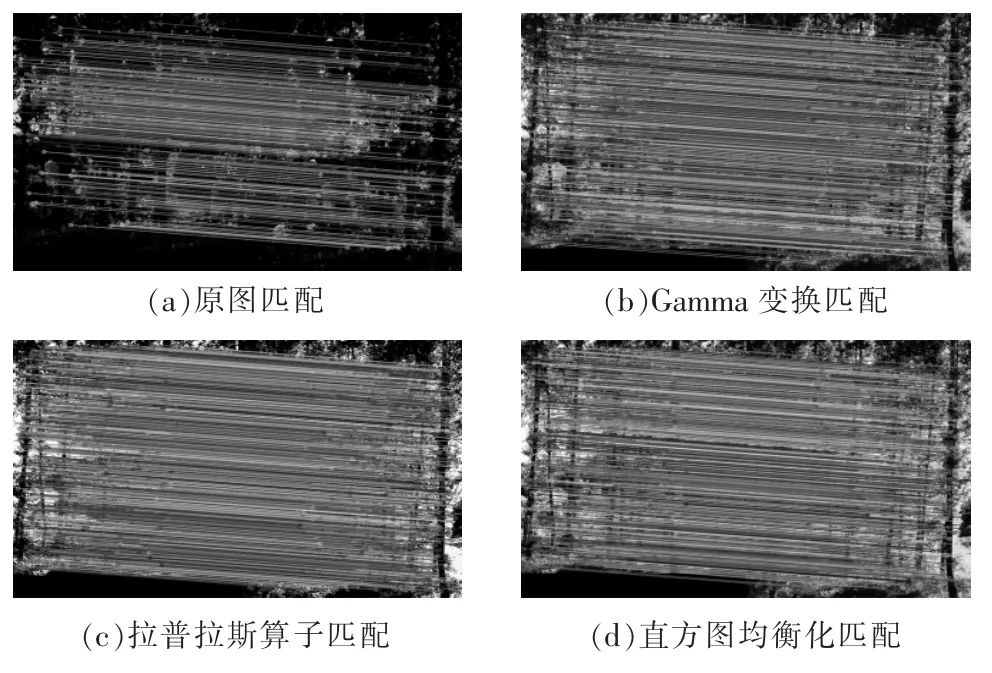
图7 光不足图像匹配结果Fig.7 Underexposed image matching results

表1 光不足图像匹配数据Tab.1 Underexposed image matching data
选择2 幅过度曝光的图像实验,见图8 及表2。
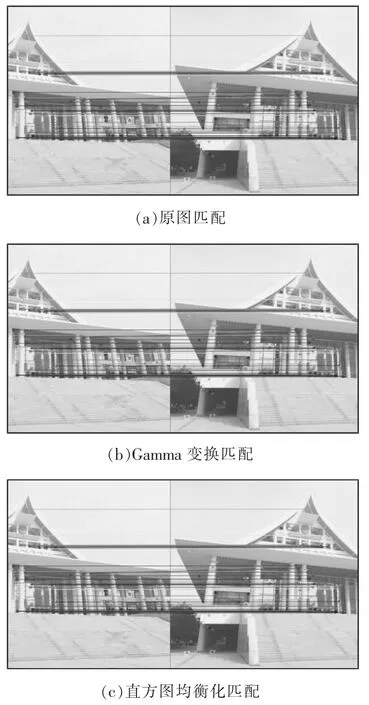
图8 过度曝光图像匹配结果Fig.8 Overexposed image matching results
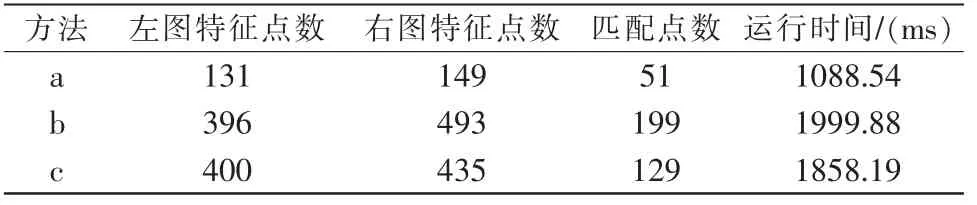
表2 过度曝光图像匹配数据Tab.2 Overexposed image matching data
通过以上2 组由于光照影响导致曝光质量缺陷的图像匹配实验可以得出以下结论:
(1)使用多种图像增强方法对图像进行预处理后,各组图像匹配点以及特征点数量均有提升。 较原图匹配效果更佳;
(2)对于第一组曝光不足图像采取拉普拉斯处理后效果最为显著;直方图均衡化特征点增加匹配点数增加少于其他增强效果;Gamma 变换效果较其他方法欠佳,且需要自行调整参数至合适亮度;
(3)对于第二组过曝光图像采用拉普拉斯和同态滤波无效果,故选取了较为合适的两种方法做对比,其中Gamma 变换匹配效果优于直方图均衡化;
(4)采用各种图像增强方法进行预处理均增加了消耗时间。 如何在提升匹配点数同时降低时间消耗有待进一步研究。
5 结语
随着社会的发展,图像匹配在各个领域也将得到越来越广泛和深入的应用。
SURF 算法是对SIFT 算法的改进,作为常用的图像匹配算法,仍将是研究的热点和重点。 在存在光照影响图像质量有缺陷时,SURF 匹配效果不好,将SURF 算法与现有的图像增强算法结合, 可以大大提高特征点提取的数量和质量[10]。
本文介绍了SURF 算法基本理论并采用RANSAC算法来对匹配点进行筛选进而提高匹配正确率,提出将SURF 算法与现有的图像增强算法相结合的思想, 先改善图像质量再进行特征点的提取与匹配,使通过适当方法处理后的图像匹配效果更佳。