高速摄像测量系统在商业航天中的应用探索
2019-10-08北京东方计量测试研究所卢晓勃农宁宁
█ 北京东方计量测试研究所 曹 勇 卢晓勃 农宁宁
一、引言
一个国家航天科技的发展水平可以透射出其综合实力及潜在的创新能力。世界经济和科技大国无不将航天科技作为国家的发展战略重点。近几年来,世界各国对航天技术研究投入呈现持续增长的态势,尤其以民营商业航天的发展最为迅猛。以美国为例,太空探索技术公司(SpaceX)、蓝色起源、轨道– ATK公司、天空盒子成像公司(Skybox Imaging)等商业航天公司,已经在美国航天经济中占据了绝对优势,并以3%的年增长率快速发展。我国的商业航天起步于20世纪90年代末,但早期发展较为缓慢,直至2014年随着航天强国国家发展战略的深入实施,我国的民营商业航天开始迅速发展,先后诞生了一批新兴航天企业并取得了优秀的成绩,如蓝箭航天、星际荣耀、零壹空间相继实施发射,信威集团、珠海欧比特、九天微星、千乘探索、长沙天仪、广东科创等公司的通信、导航、遥感、科学探测卫星发射和在轨运行,都标志着我国商业航天开始迈入发展“快车道”。展望未来3年,全球商业航天市场的竞争将更加激烈,我国商业航天发展政策环境有望得到进一步改善,下游航天产业(如卫星应用)向上游航天产业(如火箭发射和星箭研制领域)延伸拓展的趋势将进一步延续。
同时,随着商业航天的快速发展和卫星市场需求规模的扩大,可以预见:火箭和卫星等代表性航天产品将会逐渐呈现从小批量研制到大批量装备生产的发展态势。同时,对于这些航天系统(产品),从研发、设计、生产到维护的全生产寿命周期的验证与测试方案,以及高效的批量测试方案、测试系统研制也将变得愈发重要。大量的产品性能检测和系统联试所需的测量测试设备将会更广泛地在商业航天中得以应用,而其中,高速摄像测量系统作为一种非接触式的新型测量手段,凭借其创新的测量技术、高效的测试效率,以及移动、安装的灵活性、便捷性,将越来越多地被应用到生产、试验、联试、发射、在轨运行等各个环节中。
与传统的接触式测量方法不同的是,非接触式测量是随着近年来光学、计算机信息技术和电子元件技术的突破及广泛应用而快速发展起来的,尤其是人工智能技术的不断创新更为非接触式测量提供了发展动力。高速摄像测量系统作为非接触式光学测量系统的代表产品之一,从20世纪90年代开始,已逐渐在我国的航空航天、兵器、电子、核物理等领域崭露头角,并在近10年内得到快速发展,尤其是在航天领域的应用更为广泛。
高速摄像测量系统基于光学摄像测量原理,具有实时捕获目标、快速记录图像、即时回放、图像直观清晰、测量安全性高、效率高、无破坏性及工作距离大等特点,可以对物体进行静态或动态的测量,既是测量高速运动目标如位移、轨迹、速度、加速度、振频、姿态、流场等参数的重要手段之一,也是观测静态目标如应力形变、断裂瞬间影像、材料拉压性能试验等的重要手段之一,在航空航天、武器研制、试验及应用中发挥着重要作用。例如,高速摄像测量系统可以跟踪拍摄得到目标飞行过程中的序列图像或快速反应过程图像,把空间信息和时间信息一次性记录下来,在形象逼真且具有动画效果的同时,还可以进行时间域和频率域等运动数据的分析与计算。
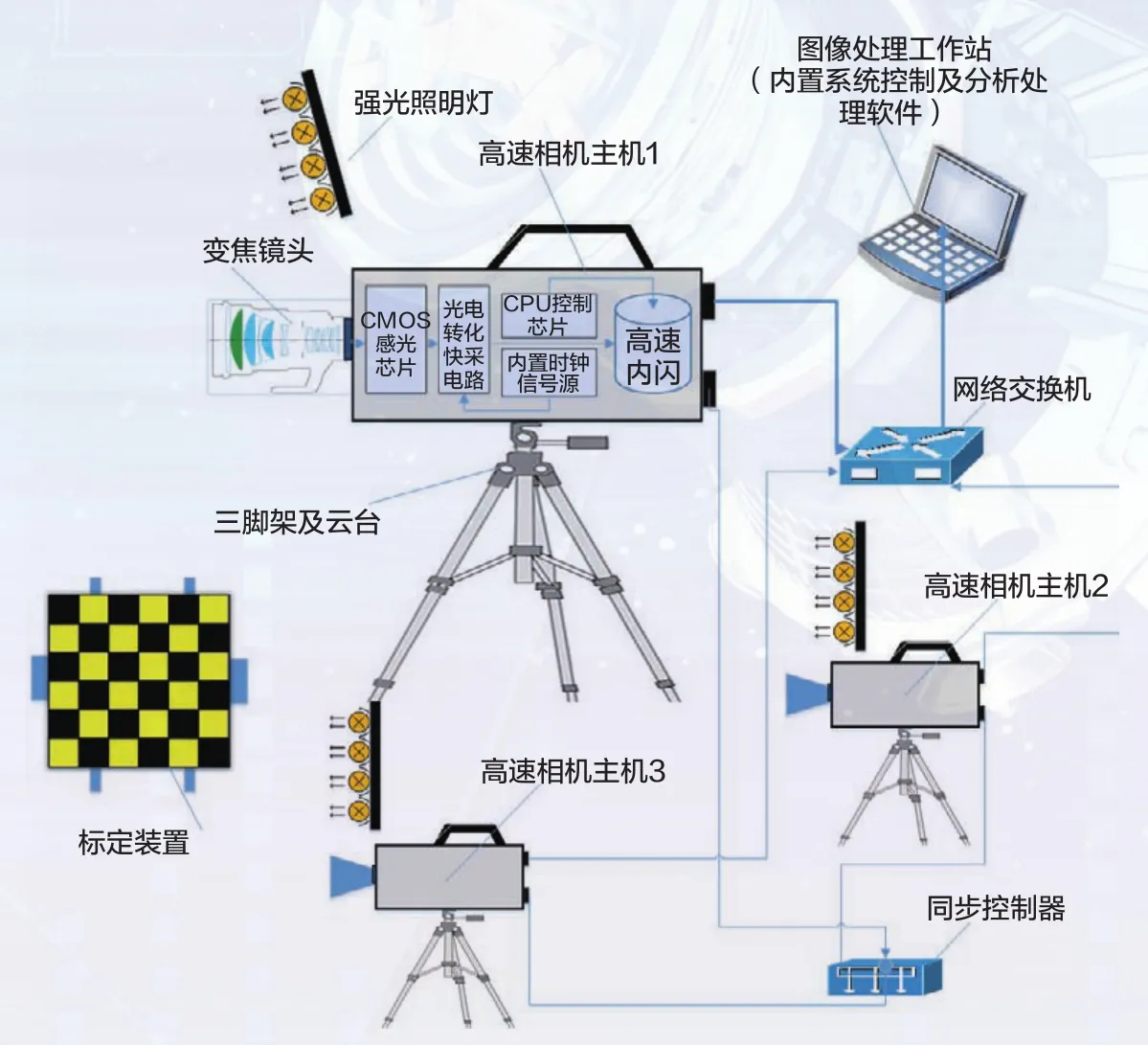
图1 高速摄像测量系统组成示意图
二、 高速摄像测量系统及技术原理简介
(一) 系统组成
高速摄像测量系统一般由软件和硬件两大部分组成,其中,软件主要包含高速摄像记录装置自身的参数设置及拍摄控制软件、空间标定软件和运动参数数据分析软件;硬件部分一般由高速摄像机/高速相机、辅助照明设备、标定装置、网络交换机、固定安装设备、图像处理工作站和触发控制设备等组成。系统的主要组成图如图1所示(以多目高速摄像测量系统为例)。
(二) 系统特点
1.高速
高速摄像测量系统中的“高速”指的是系统主要设备高速摄像机的拍摄频率,一般高速摄像机在百万像素下,常见拍摄频率范围为200~40000fps;曝光时间短,一般情况下拍摄频率都在500fps以上,曝光时间为微秒级。
2.光学成像原理
高速摄影是一种光学测量技术,利用光对物体的反射、透射、折射及衍射等特性,观察事物的变化规律,基本属于光学小孔成像设备。
3.高精度
利用软件技术和图像处理技术,可以实现小于固有硬件分辨力的亚像素定位技术,达到将被测目标图像定位精度提高至更高量级的目的。同时,可以实现高速摄像测量系统高精度的目标。
4.系统测量精度不易漂移
不同于接触式测量系统,高速摄像测量系统的测量精度一般不会像一些传统接触式传感器一样发生随着开机时间的增长而出现测量精度漂移的问题。
5.操作人员易掌握,测量方式易普及
智能手机及手机拍照功能的普及,使得即使是刚接触该领域的员工都能很快地掌握以图像数据为分析依据的高速摄像测量系统。同时,随着芯片技术和AI技术的快速发展,高速摄像系统的成本将逐渐降低、性能将进一步提高,这种测量方式将会迅速普及。
6.其他特点
高速摄像测量系统还具有以下特点:(1)系统设备体积较小、便于外场携带;(2)系统启动快、同步性好;(3)具备实时显示和即时重放的功能,便于直接观察试验过程;(4)布置实施简易、适用范围广等。
(三) 系统工作原理
摄像测量的处理对象以数字(视频)序列图像为主。将三维图像成像到二维图像是一个退化的过程。摄像测量学研究如何通过分析二维图像来重建实际三维场景中的目标信息,其内涵主要包括两个方面:一是空间场景与成像系统间的成像投影关系,即二维图像与对应三维空间物体之间的关系,这主要是测量学方面的知识;二是从单幅和多幅图像中高精度提取、匹配图像目标,这主要是计算机视觉、图像分析方面的知识。
1.小孔成像原理(中心透视投影模型)与共线方程
大多数高速摄像测量系统的图像记录方式都可以演化为小孔成像原理的应用,典型的小孔成像原理示意图如图2所示。物体表面反射光或发射光经过一个“针孔”点投影在像平面,物点、对应像点、光心(摄影中心)三点共线,满足光的直线传播条件,而以三点共线为基础,建立起来的描述这三点共线的数学表达式,称为共线条件方程式。

图2 高速摄像测量系统组成示意图
一条通过物点、像点和光心的直线一般可用两个分式线性方程表示,其共线方程的解析表达
式如下:
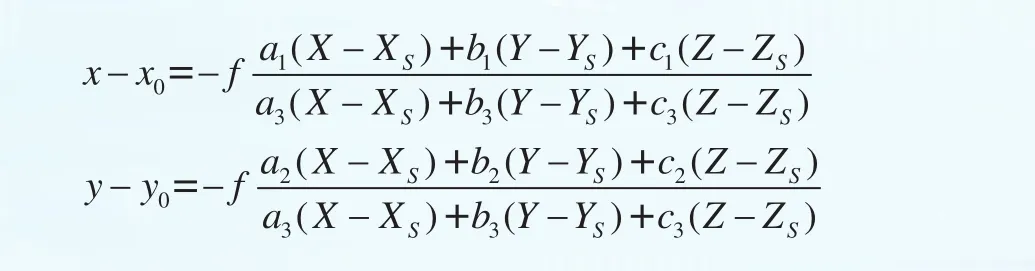
式中,x0、y0、f代表摄影系统的3个内方位元素,即主光轴、焦距在像面上垂足的像面坐标位置;XS、YS、ZS代表摄影系统的外方位元素,即摄影中心S在空间坐标系中的3个坐标值;a1、a2、a3、b1、…、c3是由3个角元素φ、ω、κ (摄影中心S空间坐标系中的3个坐标值与主光轴的夹角)构成的旋转(正交)矩阵的9个系数:

根据共线方程理论基础,可知1个点有2个方程,已知3个点可列6个方程,因此,可以解得6个外方位元素。根据(至少)3个空间已知点A、B、C,与它们在影像上的3个对应点a、b、c,就能求得影像的 6 个外方位元素。共线方程是高速摄像测量系统的基本数学模型和构成数字式投影的基础,也是系统标定及进行图像测量的基础数学公式。
2.双摄像机(或多像机)交会原理
利用两套或多套高速摄像测量系统可以得到被测目标三维空间的运动参数,其基本原理是双摄像机(或多像机)交会原理测量目标空间位置。
人眼的立体视觉是从左、右两眼分别观测一个空间点时,可以看到该点的偏差,而这种偏差与人眼观测点到被观测点的距离有关。利用三点共线知识可以得出结论:三维空间内的一个点在投影图像上的位置是由三维空间中的某条直线决定的。因此,如果一个三维空间点从其他视点观测也有同样的三维投影图像,那么被观测点的空间坐标就可以利用共线方程确定,同时,两条视线的交点就是它的位置,这就是三维重建的过程。一个空间点三维重建的基本模型如图3所示。

图3 空间点三维重建模型
对于空间物体表面的任意一点P,被摄像头C1拍摄下来后,在图片上位于P1,被摄像头C2拍摄下来后,在图片上位于P2,但是无法仅仅通过P1或者P2来得出P的三维位置,因为在直线O1P或O2P上的任意一点P′,其在图像上的位置都是P1或P2。如果利用两套摄像头来拍摄图片,就可以得知目标点位于O1P1和O2P2两条直线的交点,即可以唯一确定目标点的三维位置。
为了确定目标点的空间位置,使用不同位置的两台摄像机对目标点成像,各自定出一条通过目标点的直线,两直线的交点即是目标点的位置,这就是线–线交会,也是双摄像机三维交会测量目标点空间位置的基本原理。
(四) 系统优势
高速摄像系统作为现代光测的重要手段,能够提供高动态目标运动与形态变化的大量细节信息,分析其所记录的图像,可以得到目标的定量运动参数。该系统可广泛地应用于高准确度运动测量领域,较之常规的光学摄像测量设备,高速摄像测量设备能够提供动态范围更广、准确度更高、参数更全面及内容更丰富的测量数据。
三、 在商业航天中的应用分析
高速摄像测量系统在科学研究、医药卫生、建筑建材、冶金矿产等行业都有所应用,一般常用于流体研究、爆炸燃烧研究、飞行及武器研究等具体领域。
根据高速摄像测量系统在军工领域的实际应用情况,预测该系统可以在我国商业航天事业发展中提供的检测测试能力及应用范围见表 1。
四、应用案例设计
(一) 商业航天星箭分离地面解锁试验运动参数测量
1.测量系统组成
测量系统由2台高速摄像机、1台图像分析工作站、2套高速摄像机三脚架、2个24~70mm的自动变焦镜头、1组高亮度小范围冷光源照明灯、1块5m×5m的三维标定板、1台同步触发器、1套系统标定软件和1套三维运动分析姿态软件等组成。
2.测量内容
测量内容主要包括:星箭分离过程中卫星和箭体的相对速度、姿态及运行轨迹;解锁包带的分离时长、运动距离;包带解锁过程中是否发生回弹碰撞和产生多余物;分离过程中的影像资料记录。
3.测量范围
测量视场:(2m×2m)~(10m×10m);相机距离被摄物体运动平面距离:4~80m。
4.测量方式
采用双目相机正交测量法布置高速摄像测量系统(摄像机在百万像素下拍摄参数一般选取2000~4000fps,曝光时间不大于100μs,头触发状态);将标定板在被测区域内随意运动,触发高速摄像机工作记录图像,通过标定软件读取图像资料并对2台高速摄像机进行内外参数标定和镜头畸变校正;在卫星和箭体上张贴不全共面的至少6个合作标识;将系统同步触发信号与包带解锁点火器发火信号同步并联;解锁试验开始后,同步触发高速摄像机拍摄整个分离运动过程,并存储图像数据;利用三维运动分析软件分析计算试验测量内容要求的数据,并生成测量数据报告。
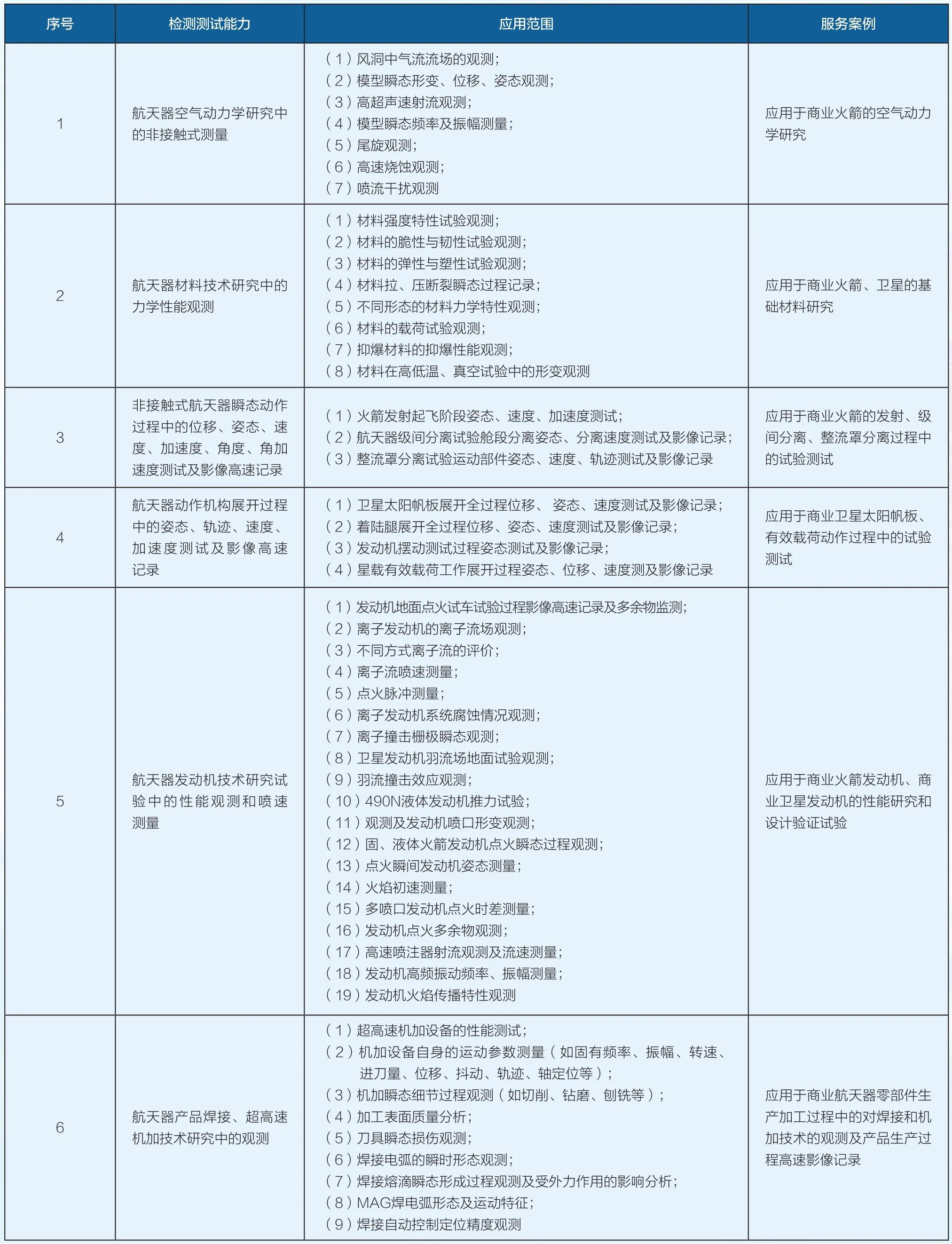
表1 高速摄像/高速相机测量系统在商业航天领域的应用及案例
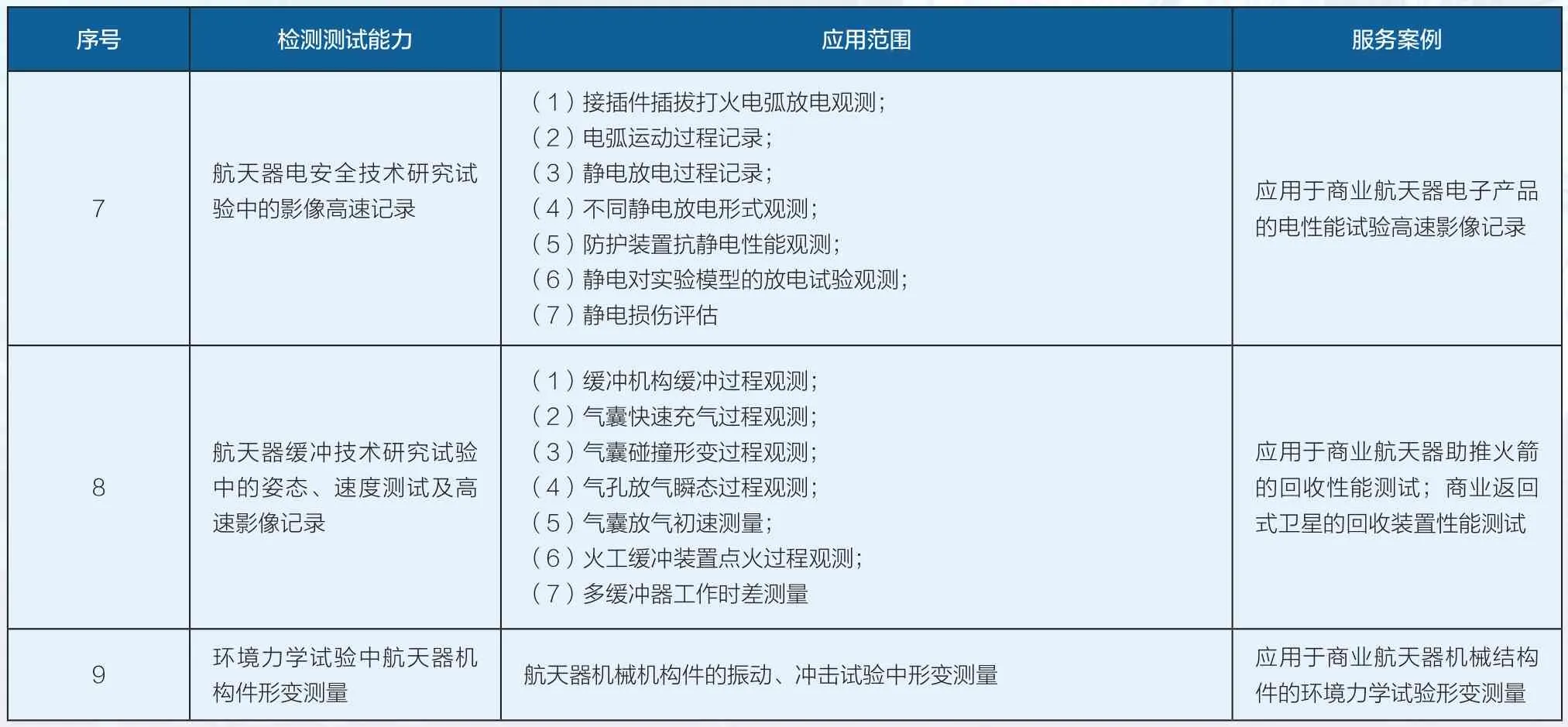
续表
(二) 商业火箭发射起飞状态实时监视测量
1.测量系统组成
测量系统由2台黑白超宽谱段高速摄像机、2台图像分析工作站、2套高速摄像机三脚架、2个400mm的长焦定焦镜头、1组红外照明灯、1套遥控控制器(含发射端和接收端)、1台同步触发器、1套系统标定软件和1套三维运动分析姿态软件等组成。
2.测量内容
测量内容主要包括:火箭发射瞬间的箭体姿态、起飞初速;起飞过程中的箭体姿态变化、速度变化及飞行轨迹;观测火箭发动机喷管运动特征及测量尾焰轮廓,进而对比推导释放能量;起飞过程中是否发生箭体故障倾斜和产生尾喷多余物;起飞全过程的影像资料记录。
3.测量范围
测量视场:(20m×20m)~(50m×50m);相机距离被摄物体运动平面距离:200~800m。
4.测量方式
采用双目相机正交测量法布置高速摄像测量系统(摄像机在百万像素下拍摄参数一般选取1000~4000fps,曝光时间不大于400μs,中间触发状态);获取箭体长度、直径等数据,并利用轴向椭圆法、箭体长宽比法和中轴线交会提取法作为现场标定输入和后期数据分析的计算方法;如果是夜间发射,利用红外照明灯为高速摄像系统提供红外谱段的照明需求;将同步触发器与遥控控制器的接收端相连;火箭点火起飞瞬间通过遥控控制器发送触发信号,并通过同步触发器触发高速摄像机拍摄整个分离运动过程,并存储图像数据;利用三维运动分析软件分析计算试验测量内容要求的数据,生成测量数据报告。
五、 结束语
未来,高速摄像测量系统将在商业航天研制、试验、发射、飞行等过程的不同阶段中发挥不可替代的作用,同时,随着当前光学图像测量技术和计算机信息技术的不断发展,利用高速摄像机设备的非接触式测量手段必将逐渐取代部分传统接触式测量手段(如振动传感器、角速率传感器、应变传感器等)。
