一种基于斜率检测算法的马赫-曾德尔调制器偏压控制研究
2019-09-27周其超陶存炳
周其超,陶存炳,黄 伟
(中国船舶重工集团公司第七二三研究所, 江苏 扬州 225101)
0 引 言
电光调制器是光控相控阵系统中的一个重要组成模块,将射频信号经过调制器加载到光信号上进行传输和信号处理。实际应用中,电光调制器多采用铌酸锂材料的马赫-曾德尔调制器。但是,由于外界环境温度变化或者高频连续信号的影响,马赫-曾德尔调制器的工作点会发生漂移,从而影响到调制器的调制精度,也会影响到整个光控相控阵系统的工作稳定[1-5]。因此,本文研究了马赫-曾德尔调制器的偏压控制技术,分析了基于传输曲线斜率检测算法的马赫-曾德尔调制器工作点偏压控制原理,并且进行了马赫-曾德尔调制器工作点偏压控制系统的硬件和软件设计。通过实验验证,表明该偏压控制系统能够对马赫-曾德尔调制器的工作点进行有效的偏压控制。
1 基于斜率检测算法的马赫-曾德尔调制器工作点偏压控制原理
在理想条件下,马赫-曾德尔调制器的传输特性曲线公式可表示为
(1)
式中,Pout为马赫-曾德尔调制器输出的光功率;Pin为马赫-曾德尔调制器输入光功率;Vπ为调制器的半波电压;V为偏置电压,即外界偏压控制系统对调制器所加载的偏置电压。图1为马赫-曾德尔调制器输出光功率与所加载的偏置电压的响应曲线。

图1 马赫-曾德尔调制器相应曲线
从图1所知,马赫-曾德尔调制器的输出光功率随着偏置电压的不同而改变。调制器根据调制方式的不同可以加载在不同的工作点。由图可知,马赫-曾德尔调制器工作点设置为-Q和+Q点时其输出信号没有失真。本文以-Q点作为工作点。
为了使调制器不受到温度等环境因素的影响而始终工作在-Q点,本文采用通过检测马赫-曾德尔调制器传输特性曲线的斜率的变化来判断此时调制器工作点的位置,利用偏压控制系统调节调制器的偏置电压,最终将工作点移到-Q点。具体做法如下:
(1) 向马赫-曾德尔调制器的偏置电压加载端加载一个微弱的扰动信号(幅值大约为调制信号的1%,且为低频信号),扰动信号经过调制器后对其进行放大和滤波;
(2) 将经过放大和滤波后的信号与原始的扰动信号进行相乘和积分处理,得到一个与马赫-曾德尔调制器传输特性曲线斜率呈线性关系的误差信号;
(3) 通过检测误差信号的大小,判断此时工作点有无漂移以及漂移的方向,最后通过调节偏压将工作点移至-Q点。
上述利用扰动信号实现对调制器的偏压控制原理如下:
设扰动信号为
VRAO=Asinωt
(2)
扰动信号经过调制器后的输出信号为
(3)
将此信号与扰动信号进行相乘和积分得到一个直流误差信号为W,即
(4)
当τ≫2π/ω时,滤除直流分量,对公式(4)展开计算得到
(5)

从马赫-曾德尔调制器的传输特性曲线来看,对公式(1)求导,从而得到斜率K为
(6)
对比公式(5)与公式(6),误差信号W与调制器传输曲线的斜率呈线性关系。从图1可知,当马赫-曾德尔调制器工作在-Q时,其斜率为最小值,故直流误差信号W也为最小值;当调制器传输曲线发生漂移时,可以通过锁定直流误差信号W的最小值从而设置新的偏置电压,最终实现对马赫-曾德尔调制器有效偏压控制。
2 系统设计
2.1 硬件设计
偏压控制系统主要包括PIN光电检测及其放大模块、低通滤波模块、相位补偿模块、乘法器模块、微处理器模块、信号产生模块、积分模块和加法器模块等。具体框图如图2所示。
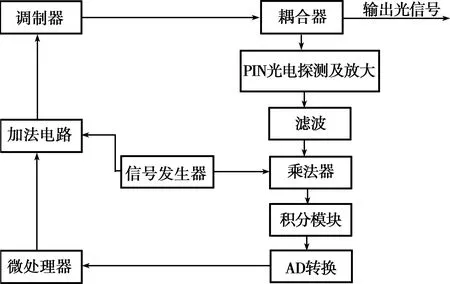
图2 偏压控制系统框图
通过马赫-曾德尔调制器输出的光信号经过耦合器分出5%,通过PIN光电二极管及其放大电路将微弱的光信号转换成电信号并进行放大。经过放大后的电信号通过低通滤波和相位补偿模块滤除掉被调制的信号及噪声。在乘法器模块中,该信号与信号发生器产生的扰动信号相乘,并将相乘的结果发送至积分模块。完成积分后得到一个误差信号,经过AD转换成数字信号后发送至微处理器模块。微处理器模块通过该误差信号去判断此时调制器是否工作在-Q点,并设置调节偏置电压。将调节后的偏置电压与扰动信号通过在加法器模块一同加载在调制器的偏压输入端,从而完成一个闭环的反馈偏压控制。
PIN光电二极管采用北京世维通科技公司的PDS473-a光电二极管。该光电二极管具有高灵敏度、低暗电流等特点,利用TI公司的OPA657运算放大器搭建反向放大电路,从而获得较大的电压信号。
为了滤除被调制信号通过调制器产生的光调制信号和噪声信号,偏压控制系统采用无限增益多路反馈型滤波电路进行滤波。考虑偏压控制系统尺寸的问题,根据减少器件简化电路的原则,偏压控制系统采用二级无限增益反馈型滤波电路,滤波的带宽为2~4 kHz。滤波电路如图3所示。
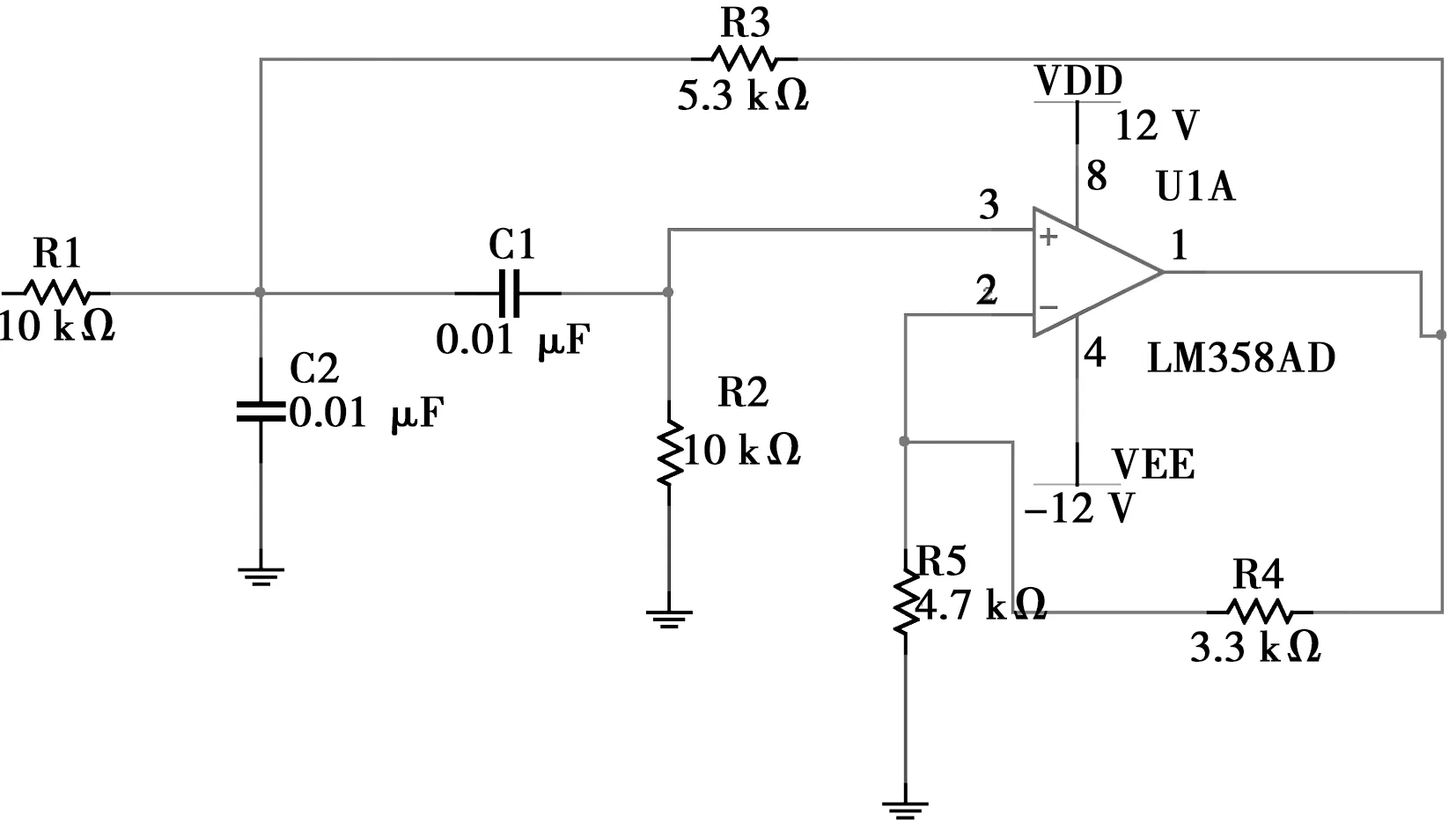
图3 低通滤波电路
乘法器模块的主要功能是实现扰动信号与扰动信号经过调制器输出的光信号进行相乘。由于扰动信号和扰动信号调制后的光信号的幅度都有正负值,所以偏压控制系统采用ADI公司的AD633四象限乘法器芯片。
偏压控制系统采用STM32F103RCT6芯片作为微处理器模块,其接收AD输出的数字信号,判断此时调制器的工作点是否发生漂移,通过相关的步进算法调节偏压输出,使得调制器输出的信号没有失真。
偏压控制系统采用ADI公司的AD9837芯片作为信号发生器。它的输出频率、波形和幅度可以通过微处理器模块进行控制。系统通过AD9837产生20 mV、3 kHz的正弦波信号。
加法器模块的功能是将扰动信号与偏置电压相加,并将同时输出的电压信号加载到马赫-曾德尔调制器的偏压输入端。系统选用TI公司的OPA2188运放搭建加法器电路。该芯片具有低噪声、高共模抑制比和高增益带宽等特点。
2.2 软件设计
偏压控制系统的软件流程图如图4所示。
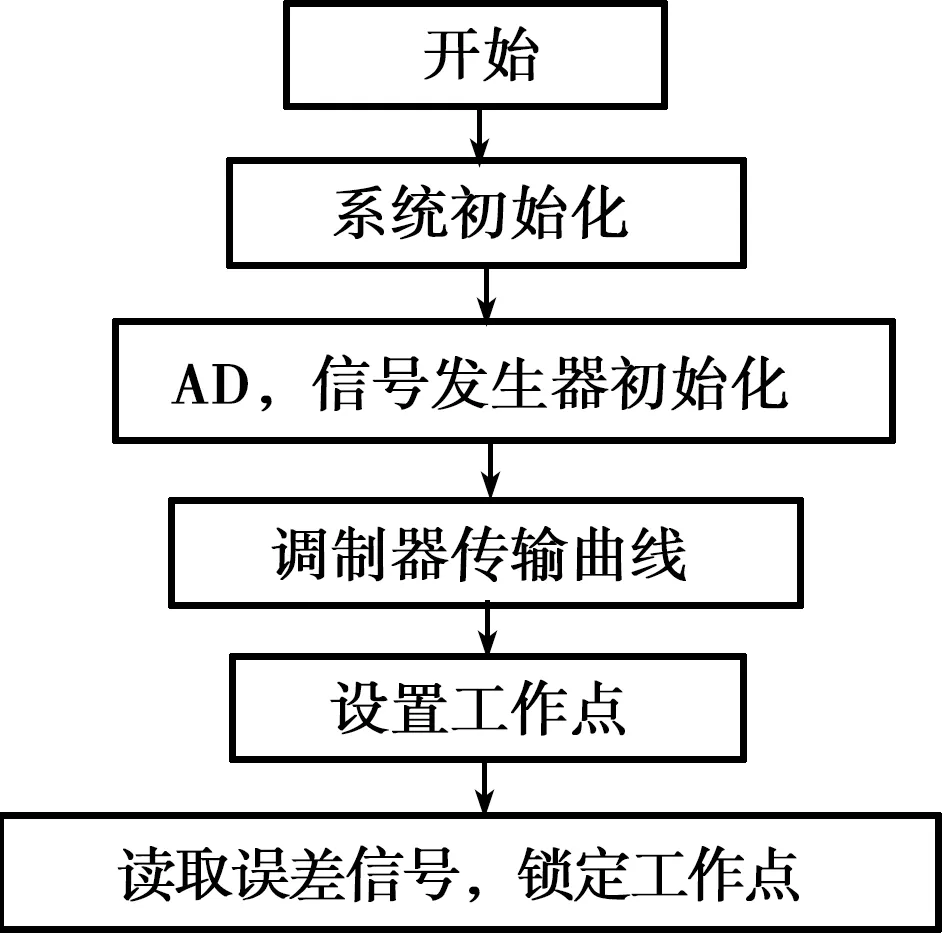
图4 偏压控制系统软件流程图
从图4可知,马赫-曾德尔调制器偏压控制系统软件主要包括系统初始化、AD和信号发生器等模块的初始化。加载偏置电压,按照一定步进逐步增加偏置电压从而得到调制器输出的光功率传输曲线。通过该传输曲线设置好初始工作点(-Q点),并采集此时的误差信号W1,设置阈值。当采集的误差信号W2>W1时,调整偏置电压使得采集的误差信号差值在阈值范围之内,从而达到锁定工作点的目的。
3 实验测试
偏压控制系统采用Oclaro公司的PowerBit SD-20型号的调制器。利用激光器作为光源,其输出功率为10 dBm,波长为1 550 nm,信号源选用频率为12 GHz、功率为-5 dBm的连续波作为调制器的射频调制信号。偏压控制系统实验流程如下:
(1) 初始化系统,激光器输出功率为10 dBm对调制器设置0~6 V、步进为0.1 V的偏置电压,得到调制器的初始传输曲线。记录此时-Q点对应的输出光功率和对应的偏置电压。初始传输曲线如图5所示。
(2) 系统为了测试偏压控制系统的有效性,将偏置电压设置为-Q点对应的偏置电压,通过对比有无偏压控制下的光功率去验证偏压控制系统的有效性。
(3) 系统选择-Q点位置的偏置电压为4.7 V。在室温条件下,间隔5 min加载偏压控制系统,测试随时间变化而输出的光功率。另外,通过稳压源输出4.7 V的固定电压加载于调制器上,测试输出的光功率。最后得到有无偏压控制下的-Q点对应的光功率曲线,如图6所示。
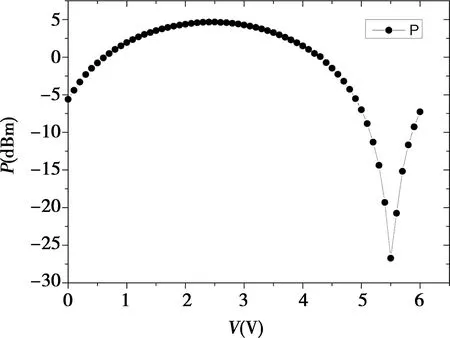
图5 初始传输曲线

图6 加载与未加载偏压控制系统-Q点的输出功率
由图6可知,若未加载偏压控制系统,通过稳压源直接加载调制器固定电压时其固定电压对应的光功率发生了明显变化,传输曲线发生了飘逸;当加载偏压控制系统后,偏压控制系统锁定了工作点,-Q点的光功率较为稳定。
4 结束语
本文分析了基于马赫-曾德尔调制器传输曲线斜率检测算法的偏压控制的原理,设计了偏置电压自动控制电路,并对偏压控制系统的硬件组成和软件流程进行了分析,最后通过实验测试验证了偏压控制系统工作的有效性,解决了马赫-曾德尔调制器工作点漂移的问题。