基于测控一体化闸门传感器清洗方法研究
2019-09-26王金辉徐宝山
王金辉,徐宝山,惠 磊
(甘肃省疏勒河流域水资源局,兰州 735211)
测控一体化闸门是澳大利亚璐碧垦公司联合墨尔本大学共同研发的集测量和控制为一体的自动化远程操控闸门,不仅能够实现对水信息的自动采集、存储,而且实现对闸门的远程精确控制和实时监控,具有精度高、操作方便的特点。甘肃省疏勒河流域水资源局借助清华大学《水联网多水源实时调度过程控制技术》科研项目和《敦煌规划》,从2012年开始,陆续在昌马灌区南干渠共引进安装了63孔测控一体化闸门,全面覆盖了南干渠管辖区域0.492 万hm2的灌溉面积[1,2]。目前,测控一体化闸门在疏勒河灌区已经安装运行五年多,整体运行状态良好,它精准的测量控制大大降低了输水过程中的跑水、漏水等水量损失问题,提高了农田水利用效率,降低了劳动强度,也提高了灌区水资源的管理水平,推进了现代化、智能化、精细化灌区的不断发展。但随着设施设备的运行,零配件的老化,或因风沙、不同水质等影响,会出现了一些运行故障,尤其是传感器故障频频发生,造成无法精准施测进而严重影响了灌区的正常输水和渠道的安全运行。不论是美国还是澳大利亚本土,由于设备的常态化使用和当地的人文环境,设备并未增加厚重的外壳和保护装置,使得设备在进行维护时,轻松方便。同时,较宽的断面以及平缓不间断的水流,对一体化测控闸门的安全稳定运行提供了天然环境,所以,传感器的故障并非闸门的主要故障和安全隐患,澳大利亚本土传感器的清洗维护只是采取最初的断电抽拔清洗方法,并未进行其他的处理和研究更加自动化的方法。
本文结合问题实际,分析研究传感器工作原理,探索传感器清洗维护方法,旨在找出一种合理、方便、高效的解决办法。同时,为使用测控一体化闸门的其他灌区提供可行的技术支撑和服务指导,从而,进一步扩大测控一体化闸门的推广应用。
1 传感器构造和测流原理
1.1 传感器结构
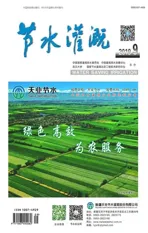
传感器正常工作是测控一体化闸门正常可靠运行的基础和重要保障。自2012年引进疏勒河灌区之后,安装在流速快、断面小的渠道上,泥沙多、水质差、断面小、流速快等问题严重影响着闸门的安全运行,特别是传感器出现流量不显示、流量不准确等问题更为突出[3,4]。传感器构造如图1所示。
1.2 传感器测流故障分析
测控一体化闸门传感器是采用超声波水位传感定位水面,以闸门横梁为参考零点,测定上、下游水位并结合闸门开度,利用堰流(顶流式)公式计算过闸流量。因为传感器内嵌在测控一体化闸门的边框内,所以渠道内的水流需要通过边框上的小孔进入传感器延伸管内,内外形成自由液面,传感器在特定的时间内及时感知水位的变化,达到实时监测水位流量的目的。由于灌区灌季或临时泥沙较大造成渠道停水,渠道不过水期间,造成从小孔进入传感器延伸管的细小泥沙沉淀硬化,在下一次闸门再过水时,水流不能及时进入传感器延伸管内,使得传感器不能感知过闸水流的变化,出现一段时间的流量不显示、不准确等问题,造成水量不能及时精准计量统计和存在行水安全隐患。
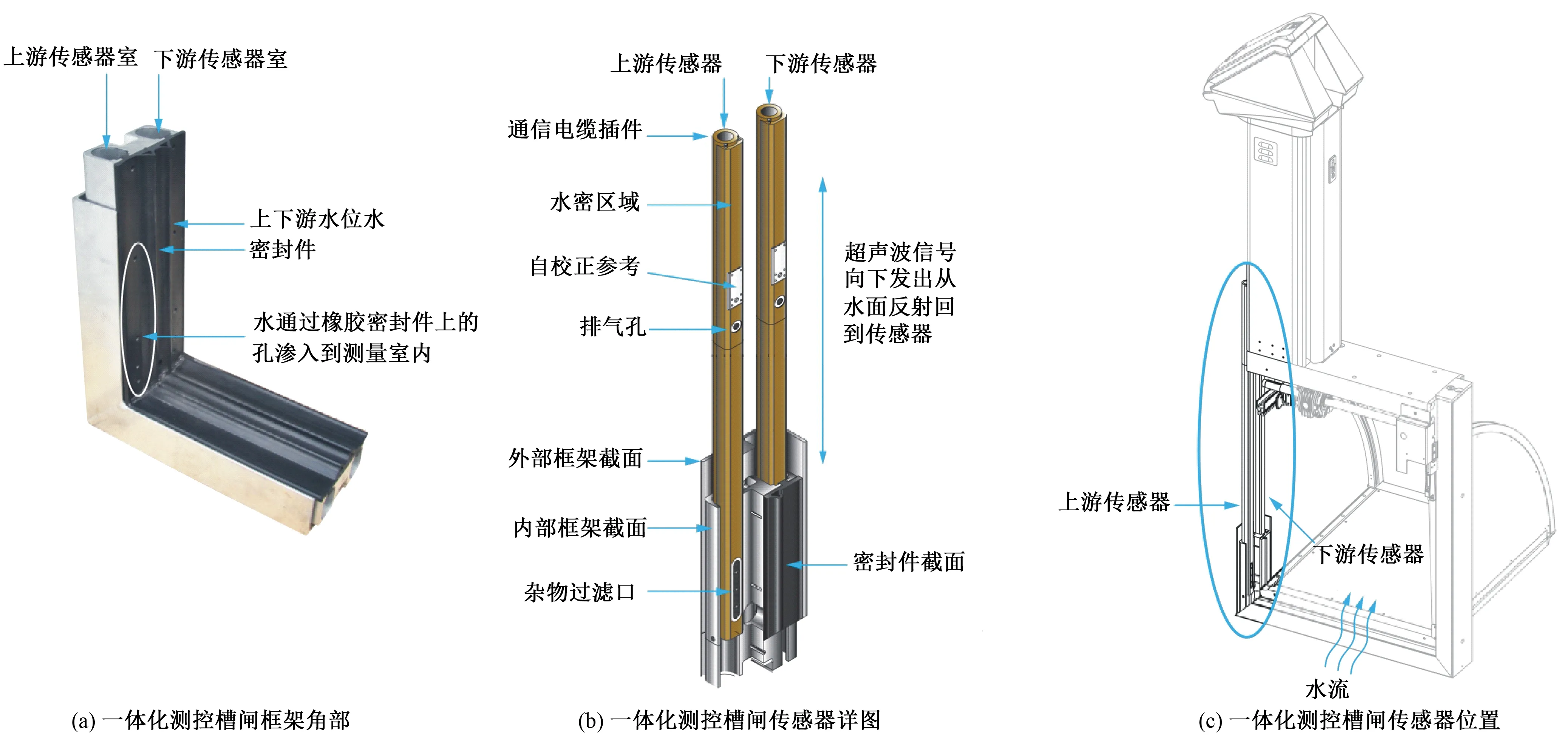
图1 测控一体化闸门传感器构造图
2 技术方案
通过研究传感器构造和分析测流原理,本文主要以试验改造和技术集成为手段,按照发现问题-提出问题-分析问题-解决问题的工作思路不断推进研究进程和实现技术目标。初期对现有保护外壳进行优化设计改造,进一步探索外置的高压水冲洗设备和高效自冲洗装置。技术路线图如图2所示。
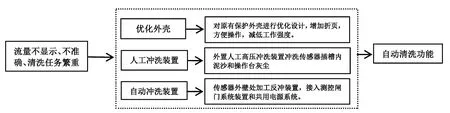
图2 技术路线图
3 设计改造与应用
3.1 外壳优化与人工清洗装置
为了方便快捷的开启保护外壳,对原有设计的保护罩外壳按照实际需求进行重新改造设计,采用轻便、强度达到要求的材质优化,对不能轻松取出传感器的一边,添加折页,优化设计尺寸。根据传感器安装的位置和运行特点,采用车载高压水枪冲洗作为基本措施,冲洗传感器插槽内泥沙。通过多次人工清洗,解决了传感器不显示、不准确的问题,提高了测量精度,减小了闸门发生故障的概率,增强了闸门运行的稳定性(见图3)。

图3 外壳设计优化及外置清洗装置
3.2 自动冲洗装置
结合前期改造措施和技术方案,多次询问潞碧垦公司技术人员并与自动化机电设备安装有限公司探讨,现场实地分析研究,对传感器卡槽和外壁进行设计改造,共用闸门电源,研究安装自动清洗装置和设备,实现自动冲洗的功能。
(1)装置工作原理。该自动冲洗装置控制系统由PLC、人机界面、12 V转220 V逆变控制单元、软件控制单元等组成以及外加冲洗水泵和超声波传感定位器。此控制系统根据人机界面设定的冲洗时间和水位阀值,通过可编程控制器,精确地控制电机运转,启动水泵工作,实现对测控一体化闸门水位传感器的冲洗[5-10]。具体清洗原理流程如图4所示。
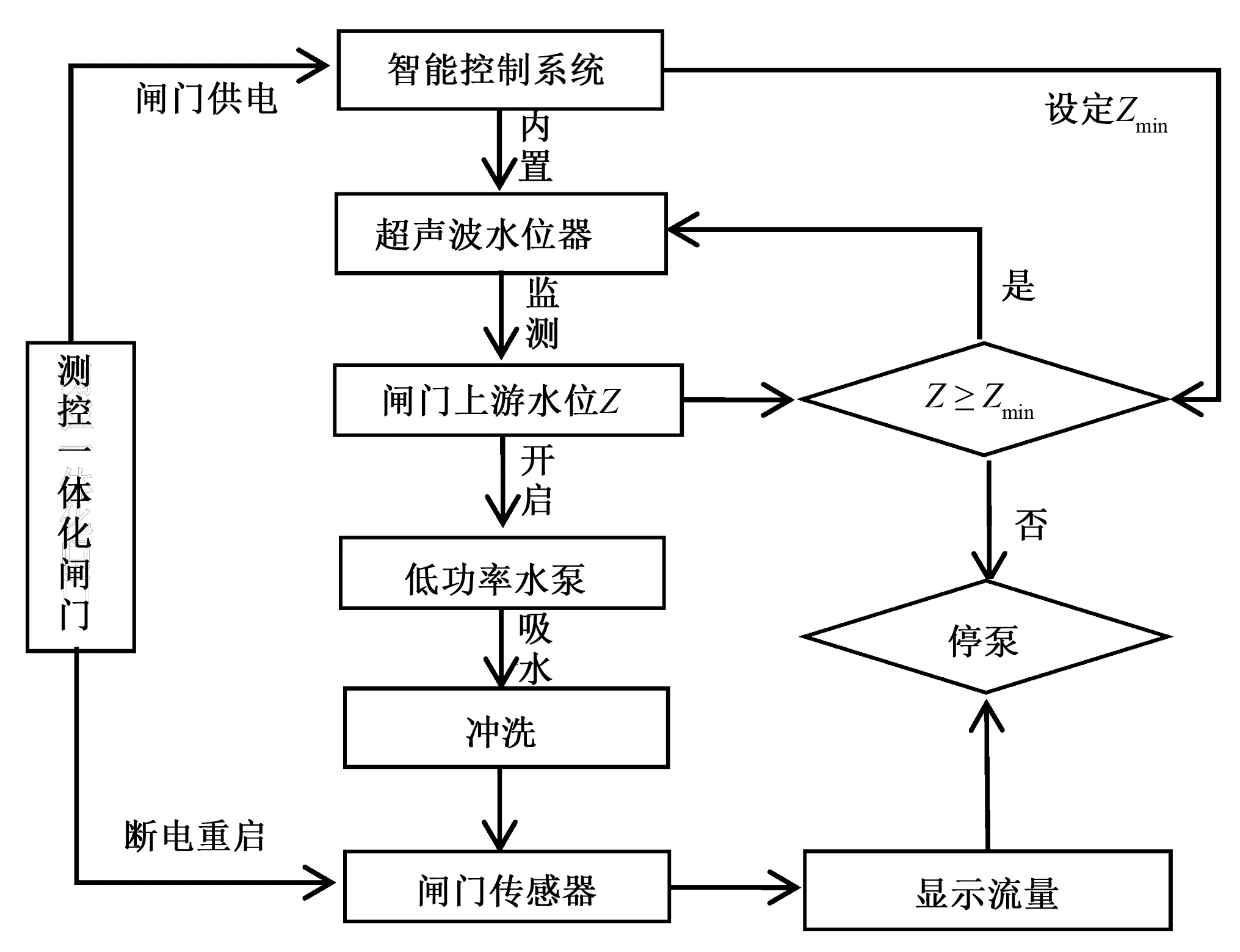
图4 清洗原理流程图
(2)现场试验及试运行。开灌前,将自动冲洗装置控制系统安装就绪,灌水后进行了试运行。现场管理人员开启控制系统清洗装置,初步设定清洗时间为1 min+间隔时间为3 min,共计4 min。清洗阈值水位设定在30 cm处,经过4 min的清洗,闸门传感器从一开始的不显示数据逐渐显示水位数据并且从水面清晰地看到通过冲洗装置增压冲击到传感器的气泡。自动冲洗装置控制系统达到了试运行目标和前期研究目的。
通过自动冲洗装置清洗,取出传感器查看延伸管底部,基本达到在人工清洗状态下的效果,去除了表面的沉积和网状内部淤积的泥沙。清洗效果如图5所示。
3.3 数据对比分析
根据现场试运行一个循环4 min运行情况,对传感器水位流量变化进行数据统计和分析。在冲洗之前,闸门开始放水,下游传统巴歇尔量水堰已经监测到9 cm水位,按照三型堰流量关系曲线换算成水量为0.030 m3/s,但是测控一体化闸门一直处于不显示流量状态,从远程和本地查看流量,流量数值为0,而闸门实际已经过流,务必会造成运行安全隐患。具体如图6所示。

图5 清洗前后效果对比
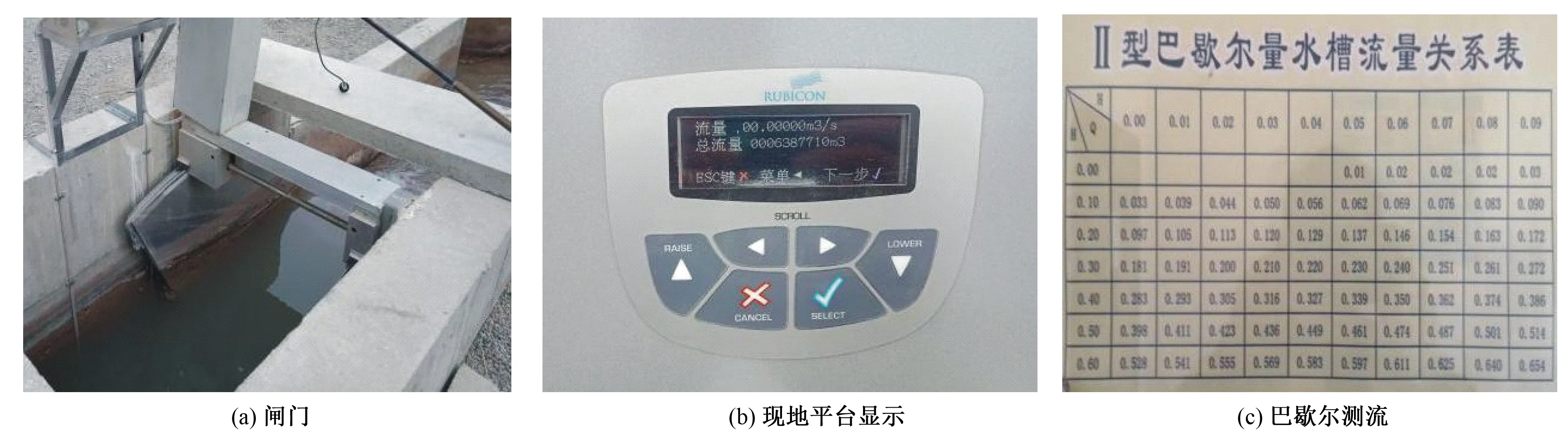
图6 冲洗前闸门显示水位流量
为了验证设备清洗效果,开启自动清洗装置,设定时间开始清洗。在清洗过程中,闸门依旧过流且水量保持到目标流量值,实时观测闸门传感器水位流量变化,流量变化一次,秒表记录一次时间。经对记录的水位流量变化情况进行统计分析,根据图7(a)所示,传感器在冲洗过程中,从一开始的没有数据,到0∶28∶48 s时,流量显示数据为0.022 8 m3/s,之后随着时间轴的不断推移,流量处于逐渐增大趋势,最终时间在2∶00∶00 s左右,流量数值保持在0.264 2~0.265 3 m3/s。主要原因是通过冲洗装置将有压水注入传感器延伸管内,不仅清洗了延伸管内部的泥沙,也是延伸管内自由液面不断上升,造成传感器监测到不断变化的水位流量,由于进入传感器延伸管内的有压水最终稳定在一个液面,所以流量数值也保持在一个稳定值。
之后自动清洗装置停止冲水,传感器延伸管内水位液面逐渐回落,根据图7(b)所示,从最初的0.267 9 m3/s下降到0.098 m3/s,共用时0∶48∶59 s。此时,通过2 min的冲洗,测控一体化闸门传感器基本恢复正常,能够精准量测水位流量,传感器监测到闸门有过水,之后传感器根据闸门实际的过闸水量计算量测,水位流量最终稳定在0.1 m3/s左右,与之前量测的水量(巴歇尔量水堰)基本一致。
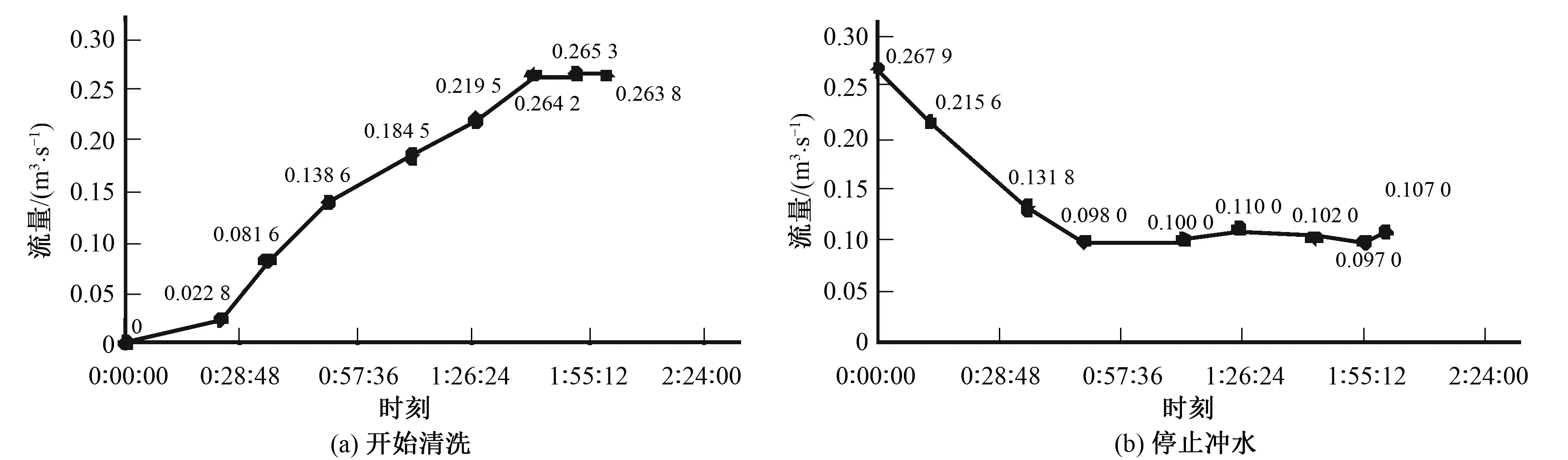
图7 冲洗过程中闸门监测水位流量变化趋势
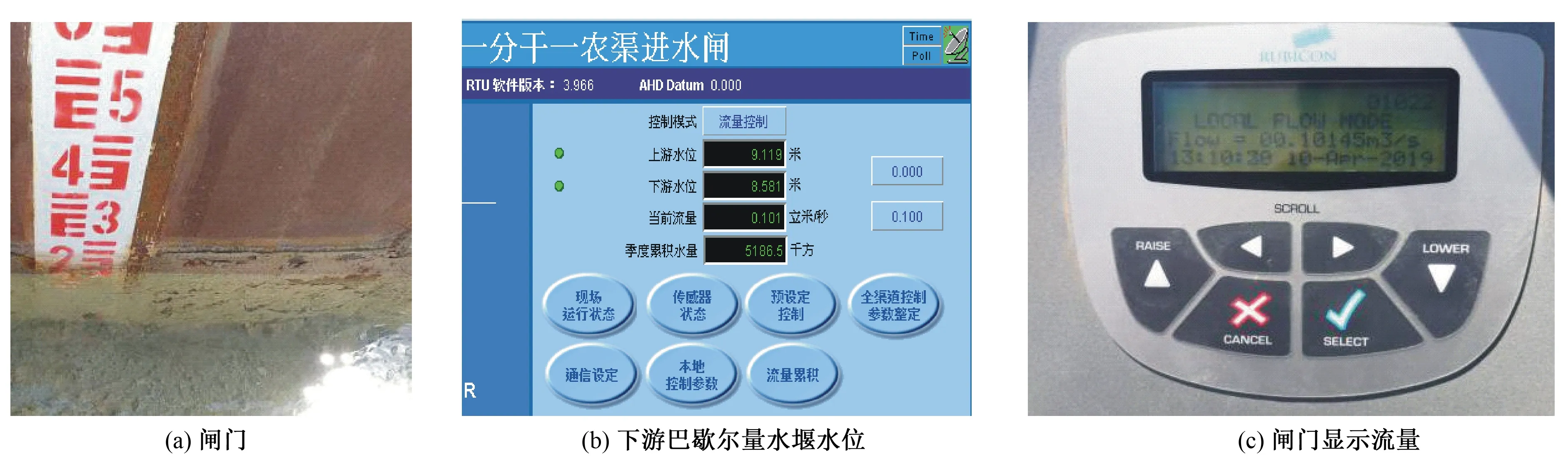
图8 冲洗后闸门水位流量对比图
由图7所示,流量趋势变化充分说明自动清洗装置基本达到了清洗传感器的目的,试运行状况良好,满足研究设定的目标要求。通过进一步对比闸门显示流量和下游巴歇尔量水堰测量水位,两种量水设施设备显示的水位流量基本相同,误差在4%内。如图8所示。
4 结 语
通过认真观察试验和试运行分析研究,从设备保护外壳改造入手到实现自动冲洗功能为目标,根据现场实际提出了自动清洗装置,最终解决传感器不显示、不准确的问题,大大降低了维护人员的工作强度,而且避免了闸门由于流量不显示、不准确造成的运行管理问题,增强了一体化测控闸门的安全稳定性,提高了灌区水资源利用效率,实现了建立田间精细化灌溉技术体系的战略目标,为其他安装一体化测控闸门的灌区提供技术指导和运用示范。同时,通过此次解决传感器故障的技术难题,切实更进一步发挥了一体化测控闸门自动控制和精确测流优点,为灌区发展现代化、信息化、自动化提供坚强有力技术支撑和设备保障。