基于dSPACE的电机控制器硬件在环测试研究
2019-09-26党美婷任佳越杨启东
党美婷,任佳越,杨启东
基于dSPACE的电机控制器硬件在环测试研究
党美婷,任佳越,杨启东
(长安大学汽车学院,陕西 西安 710054)
文章阐述了基于dSPACE的永磁同步电机控制器硬件在环的测试原理,从硬件和软件两个方面分别搭建了硬件在环仿真测试平台。在所搭建的平台上对永磁同步电机控制器进行硬件在环仿真测试,测试结果表明,该永磁同步电机控制器有着良好的功能性以及该硬件在环仿真测试平台能够对控制器进行有效测试,缩短了控制器的开发周期,减少了开发费用。
电机控制器;dSPACE;硬件在环
引言
新能源汽车在解决能源危机和环境污染方面发挥着不可替代的作用,而纯电动汽车在新能源汽车中又占据着十分重要的地位。纯电动汽车由主要电池、电机及驱动系统、整车控制器及相关辅助系统组成[1]。电机和控制器是电动汽车的驱动部分。电动汽车控制器就像电动汽车的心脏一样,是电动汽车核心部件,它的作用是控制动力电池与电机之间的能量交流输导[2]。硬件在环测试是V字型开发路线中重要的一环,全球各大汽车厂商都非常重视硬件在环测试这一阶段,因为硬件在环测试可以大大减少开发周期,很大程度上减少研发费用的浪费[3]。国外大型汽车公司如大众、宝马、奔驰、现代、福特等,已经将硬件在环测试纳入到他们的整车开发平台中[4]。硬件在环测试系统有几种比较成熟的方案:德国的Dspace系统;德国Etas公司的Lab Car系统;National Instrument的PXi系统;基于MATLAB的xPC target系统[5]。dSPACE具有先进的硬件处理器和具备高速的运算能力,并且具有丰富的I/O口,足够可以完成系统配置、代码生成下载以及功能调试等功能[6]。本文阐述了基于dSPACE的永磁同步电机控制器硬件在环的测试原理,对电机控制器进行有效测试,并通过测试结果验证电机控制器的功能性和电机控制器硬件在环仿真测试平台的有效性。
1 硬件在环测试基本原理
1.1 硬件在环测试原理
硬件在环(Hardware-in-the-loop)仿真测试系统,是将搭建好的仿真模型编译下载到机柜板卡中,机柜通过I/O接口与被测控制器相连,通过实时在线运行模型来模拟控制器的运行环境,使控制器判断处于真实的环境中,从而对被测控制器进行全方面的、系统的测试。该系统能够实现在实验室环境下进行边开发边测试,可以减少车型开发周期;可以设置各种极端工况和故障工况,安全可靠,减少了实车测试的开发费用。
1.2 永磁同步电机控制器硬件在环测试原理
永磁同步电机控制器(下称“MCU”)HIL测试系统主要包括以下几个部分:dSPACE机柜、待测MCU、上位机以及电机驱动系统模型。
如图1所示,在MCU HIL测试系统中,永磁同步电机控制器是真实的控制器,而永磁同步电机、逆变器、旋转变压器等采用仿真的模型。在Matlab/Simulink中搭建仿真模型,将编译好的模型下载到dSPACE机柜中,通过机柜板卡接口与真实的MCU相连接,互相传递信号。
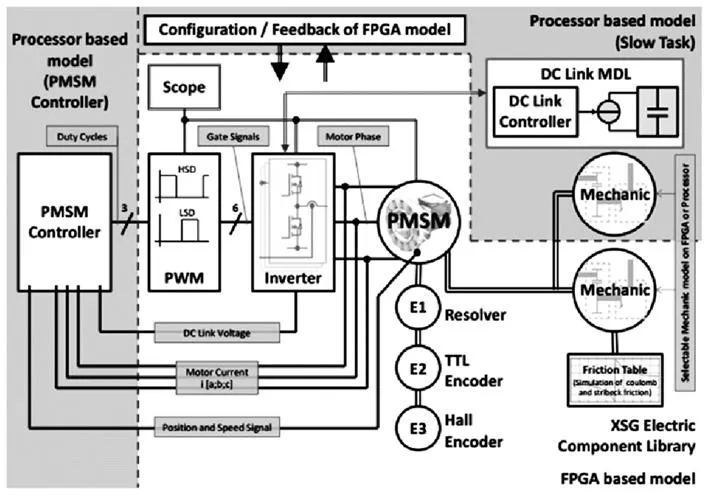
图1 电机驱动系统硬件在环原理图
2 系统硬件测试平台的开发
2.1 概述
MCU HIL测试系统的硬件平台包含三个部分:上位机、dSPACE机柜和永磁同步电机控制器。上位机主要用来开发测试管理界面,在测试过程中进行手动测试用例的执行以及测试过程的监测;dSPACE机柜中含有多种板卡资源,每一种板卡会有多个ADC、DAC、DIGIN和DIGOUT等通道类型,可以进行选择。
2.2 硬件系统开发
永磁同步电机控制器采用的是某一纯电动汽车的MCU。MCU HIL测试实时硬件系统采用的是德国dSPACE公司的SCALEXIO系统的硬件平台,资源板卡包括3个DS2680板卡、1个DS2655板卡和1个DS2671板卡。其中,DS2680板卡有22路模拟输入ADC通道、32路模拟输出DAC通道、30路DIGIN通道、28路DIGOUT通道、12路电阻模拟Resistance Out通道、18路可变输入Flexible_IN通道;DS2655是可编程的FPGA板卡,用于计算速度要求较快、计算精度要求较高的模块,包括5路模拟输入ADC通道、5路模拟输出DAC通道以及10路Digital I/O通道;DS2671是支持CAN/LIN/FlexRay的总线通讯板卡,有4路通道。
3 系统软件测试平台开发
3.1 概述
MCU HIL测试系统软件平台包含:搭建电机驱动系统模型、开发测试管理界面。
3.2 电机驱动系统模型
电机驱动系统模型由两部分组成:主处理器模型和FPGA模型。FPGA模型结构如图2所示,FPGA模型的处理速度可以达到8ns级的仿真步长,由于电机、逆变器以及旋转变压器等模块运算速度要求较高,所以将其搭建在FPGA模型中。

图2 FPGA模型
主处理器模型的运算速度较低,所以将一些对运算速度要求不高的模块搭建在主处理器模型中。图3是主处理器模型结构。Environment_Control是环境参数配置模块,在这个模块中可以设置母线电压、电机转速和转矩等参数。
Model包括像测功机模型以及母线电流模型这种在系统中运算速度较慢的模型。在FPGA模型中也包含测功机模型,可以在Environment_Control中选择测功机模型运行在哪一部分中。

图3 主处理器模型
eDrive是主处理器模型与FPGA模型相互传递信号的关键环节,包括了Register模块、Buffer Interface模块等。其中主处理器模型和FPGA模型是通过Buffer Interface来互相传递信号的。
3.3 开发测试管理界面
运用dSPACE公司开发的ControlDesk软件来开发测试管理界面,对整个测试进程进行监控与监测,拥有虚拟仪表显示、数据监测、变量赋值等功能。
图4为MCU硬件在环仿真测试平台,根据MCU测试需求,将测试界面划分为电源控制、虚拟仪表显示、开环参数设定、电机控制模式、电机状态检测、旋变参数设定、故障检测以及变量采集等模块。MCU 信号与其中每一个模块的信号对应连接,各个模块可以实现监测与采集MCU 信号,也可以仿真模拟信号发给MCU。

图4 MCU硬件在环仿真测试平台
4 MCU HIL测试用例与验证
4.1 MCU HIL测试用例设计
根据MCU的功能规范,可以设计比较全面的覆盖范围较高的测试用例对MCU进行测试。目前开发测试用例的方法主要有黑盒测试和白盒测试。黑盒测试是功能性测试,不需要考虑控制器内部程序逻辑,根据输入变量来观察输出结果是否为期望值。本文采用的就是黑盒测试。
本文测试用例设计包含了MCU状态切换、MCU控制功能、MCU数据采集、MCU故障保护、MCU输出测试、MCU异常工况、MCU总线通讯这7个方面,测试覆盖度较高。
4.2 MCU测试结果验证
永磁同步电机硬件在环测试实物图如图5所示。

图5 永磁同步电机硬件在环测试实物图
本文将主要阐述MCU控制功能和MCU故障保护测试这个方面。
4.2.1 MCU控制功能
MCU控制功能测试主要包括了在多种不同的工况下,MCU是否能准确监测电机转速与转矩的变化。本文主要介绍在转矩控制模式下,初始条件为转速为2000rpm,转矩50Nm,MCU监测电机转速和转矩变化的情况。如图6所示,初始电机转速设置为2000rpm,初始转矩为50Nm,在2.2s时,MCU监测到的电机实际转速达到2000rpm,结果表明了MCU能准确监测到电机转速的变化。在4.5s时,设置转矩为100Nm,在5.5s时,MCU监测到的电机实际转矩达到100Nm,结果表明了MCU能准确监测到电机转矩的变化。

图6 MCU转速与转矩
4.2.2 MCU故障保护测试
MCU故障保护测试涵盖范围比较广,本文主要介绍过压故障保护、电机控制器温度故障保护和超速故障保护。
当直流母线电压数值超过420V但低于430V时,MCU会触发一级故障,当母线电压数值低于420V时,MCU恢复正常工作;当直流母线电压数值超过430V但低于440V时,MCU会触发二级故障,当母线电压数值低于420V时,MCU恢复正常工作;当直流母线电压数值超过440V时,MCU会触发三级故障,必须进行上电下电操作,MCU才能恢复正常工作。如图7所示,在电机转速为2000rpm,转矩为50Nm时,改变直流母线电压数值为425V时,当MCU实际电压值跟随超过420V时,电机控制器立刻触发一级故障保护;当MCU实际电压值降低至420V以下时,电机控制器恢复正常工作。从测试结果可以看出,MCU可以检测到过压故障且能够实现自我保护功能。
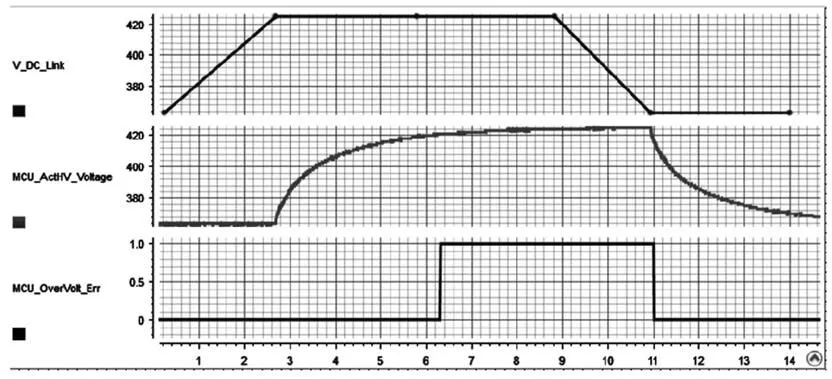
图7 MCU过压故障保护
当电机控制器温度位于90度至95度时,MCU触发一级故障,当控制器温度低于90度时,MCU恢复正常工作;当电机控制器温度位于95度至105度时,MCU触发二级故障,当控制器温度低于95度时,MCU恢复正常工作;当电机控制器温度大于105度时,MCU会触发三级故障,必须进行上电下电操作,MCU才能恢复正常工作。如图8所示,在电机转速为2000rpm,转矩为50Nm时,设置控制器温度为98度,当MCU实际温度值跟随超过95度时,电机控制器立刻触发一级故障保护;当MCU实际温度值降低至95度以下时,电机控制器恢复正常工作。从测试结果可以看出,MCU可以检测到控制器温度故障并且能够进行自我保护。
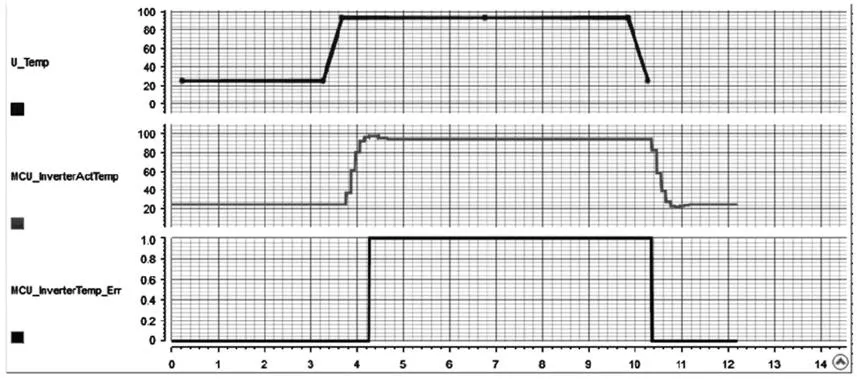
图8 MCU温度故障保护

图9 MCU转速故障保护
当电机转速数值超过12000rpm但低于12500rpm时,MCU会触发一级故障,当电机转速数值低于12000rpm时,MCU恢复正常工作;当电机转速数值超过12500rpm但低于13000rpm时,MCU会触发二级故障,当电机转速数值低于12500rpm时,MCU恢复正常工作;当电机转速数值超过13000时,MCU会触发三级故障,必须进行上电下电操作,MCU才能恢复正常工作。如图9所示,初始时电机转速为0rpm,转矩为50Nm时,改变电机转速数值为12700rpm时,当MCU实际转速值跟随超过12700rpm时,电机控制器立刻触发二级故障保护;从测试结果可以看出,MCU可以检测到超速故障。
5 结论
本文基于dSPACE搭建了永磁同步电机控制器硬件在环仿真测试平台,详细介绍了MCU硬件测试平台的开发、软件测试平台的开发、测试用例的设计、MCU控制功能测试以及故障保护测试的实施。仿真测试结果验证了永磁同步电机控制器的功能性和该永磁同步电机控制器硬件在环仿真测试平台的有效性。
[1] 焦建刚.纯电动汽车结构与原理介绍[J].汽车维修与保养, 2017(1): 94-97.
[2] 钟逸飞.低速电动汽车用永磁同步电机控制器研制[D].武汉:华中科技大学,2018.
[3] 田军辉.纯电动客车整车控制器硬件在环测试系统开发及驱动控制策略研究[D].长春:吉林大学,2013.
[4] 唐云.基于NI平台的汽车 PCM 硬件在环测试系统研究[D].杭州:浙江大学,2016.
[5] 杨涤.系统实时仿真开发环境与应用[M].清华大学出版社, 2002.
[6] Jiang Y,Jiang L,Xu W.The Research of dSPACE Based on Hardware- in-the-Loop Simulation in Electro-Hydraulic Servo Control[J]. Mechanical Engineering & Technology,2014,3(2).
Hardware-in-the-loop Test Study of Motor Controller Based on dSPACE
Dang Meiting, Ren Jiayue, Yang Qidong
( Chang’an University School of Automobile, Shaanxi Xi’an 710054 )
This paper expounds the hardware-in-the-loop testing principle of dSPACE based permanent magnet synchronous motor controller, building a hardware-in-the-loop simulation test platform from hardware and software. The hardware-in-the-loop simulation test of the permanent magnet synchronous motor controller is carried out on the built platform. The test results show that the permanent magnet synchronous motor controller has good functionality and the hardware-in-the-loop simulation test platform can effectively implement the controller. Testing has shortened the development cycle of the controller and reduced development costs.
Motor controller;dSPACE;Hardware-in-the-loop
TM306
A
1671-7988(2019)18-131-04
TM306
A
1671-7988(2019)18-131-04
党美婷(1996-),女,长安大学汽车学院硕士,研究方向:新能源汽车HIL测试。
10.16638/j.cnki.1671-7988.2019.18.044
