基于微处理器的单神经元PID交流恒流源装置
2019-09-25王学佳
王学佳


摘 要:文中设计一种基于单神经元PID的交流恒流源,以微处理器为核心,采用不对称规则法输出正弦脉宽调制(SPWM)波,同时利用单神经元PID作为控制算法对SPWM波进行调制,在外界负载发生改变的情况下,达到保持电路电流恒定的目的。实验结果表明,该交流恒流源能够稳定0~20 A的任意电流值,并且在负载改变后能快速响应,较传统的PID控制方法具有更加良好的可靠性与灵活性,对交流恒流源的实际应用具有积极作用。
关键词:单神经元PID;微处理器;交流恒流源;快速响应;不对称规则法;正弦脉宽调制
中图分类号:TP23文献标识码:A文章编号:2095-1302(2019)08-00-03
0 引 言
交流恒流源是在外界电网电源产生波动或者用电负荷阻抗的特性发生变化时,仍能使输出的电流保持恒定的交流电源装置[1]。目前的交流恒流源大多使用传统的PID控制而达到恒流的目的[2-4],传统PID无法适应所有负载类型与容量情况,即参数整定的结果只能适合单种负载或者固定电流等级情况[5]。因此,本文设计并实现了一种可以自学习而改变PID三个参数的单神经元PID交流恒流源,使其能够稳定一定区间范围内的任意电流值,并且能够适应负载的改变而做出自适应调整。
1 单神经元PID算法
单神经元是构成神经网络的基本组成单位,具有很強的自适应能力和自学习能力,并且具有响应速度快的优点[6]。虽然多层次神经网络控制的自学习、自适应以及联想功能都更为出色,可以逼近任意的非线性函数,但是其学习时间较单神经元控制更长。同时,对比传统的PID控制算法,单神经元PID控制可以实现在线实时整定参数,对复杂以及时变系统具有更优的控制效果。本文所设计的智能恒流源系统实时性较高,采用单神经元PID控制,学习时间比神经网络短,控制精度依然高,而且可以具有较强的自学习、自适应以及自校正功能。
单神经元PID的控制结构图如图1所示。单神经元PID的控制输出u(k)作为SPWM波的调制度,通过控制u(k)大小来达到调制SPWM波的目的,从而控制交流电流的大小,满足负载的工作要求,能够让执行器在较为理想的状态下对执行对象进行更好地支配。同时,通过对输出结果y(k)进行采样变换处理,作为单神经元PID控制的反馈输入,达到自学习、自适应的闭环控制效果,使恒流源的精度与响应速度更优。
此控制器的控制算法为:
式中w1,w2,w3为PID的三个参数。权值的调整按有监督的Hebb学习规则实现。
式中:
η为学习速率,η范围在0~1之间;K为神经元的比率系数,K>0。在实际调试时,η取0.4,K取1.7。当K值取得过大时系统发散,当K值取得过小时系统快速性差[7]。
2 SPWM波的产生
产生SPWM波的算法主要有自然采样法、等效面积法、对称规则采样法、不对称规则采样法等[8]。
将正弦波作为调制波,等腰三角波作为载波进行比较,在两个波形的自然交点时刻控制开关器件的通断,这就是自然采样法。其优点是所得SPWM波形接近正弦波的程度最高,但由于三角波与正弦波交点有任意性,脉冲中心在一个周期内不等距,其脉宽表达式是一个超越方程,计算量大,难以达到实时控制的效果[9]。
等效面积法是SPWM波原理的直接阐释,用同样数量的等幅而不等宽的矩形脉冲序列代替正弦波,然后计算各脉冲的宽度和间隔,并把这些数据存于计算机中,通过查表的方式生成PWM信号控制开关器件的通断,以达到预期的目的。此方法是以SPWM控制的基本原理为出发点,可以准确地计算出各开关器件的通断时刻,其所得的波形很接近正弦波,但其存在计算复杂、数据占用内存大以及不能实时控制的缺点[10]。
对称规则采样法由经过采样的正弦波(实际上是阶梯波)与三角波相交,根据二者的相交点来得到脉冲宽度。这种方法只在三角波的顶点或底点位置对正弦波采样而形成阶梯波。其达到的效果与自然采样法相近,但计算量相比自然采样法大大减少,因此其应用场景较广泛[11]。但是对称规则采样法的采样频率较高时,其谐波分量会较大。
不对称规则采样法是以三角波的顶点和底点位置与正弦波的交点作为采样点,根据采样点值的大小来形成阶梯波,而该阶梯波的脉冲宽度在一个三角波的周期范围内,其位置不对称,因此把此种方式叫作不对称规则采样[12]。不对称采样相比对称采样,其形成的阶梯波更接近于正弦波时的效果。实验结果表明,使用不对称规则采样法在保证载波比等于3或者3的倍数时,逆变器的输出电压不存在偶次谐波分量,并且其他的高次谐波分量的幅值也较小,性能较对称规则采样有一定的提升。
综上分析,本恒流源系统SPWM波算法采用的是不对称规则采样法,以下是对本算法的分析。
不对称规则采样法在每个载波周期采样两次,既在三角波的顶点位置采样,又在三角波的底点位置采样,这样形成的阶梯波与正弦波的逼近程度会大大提高。不对称规则采样法生成SPWM波的原理图如图2所示。微处理器产生一定频率的三角波作为载波,设置其分别在三角波的顶端和底端产生定时器计数溢出中断,在中断处理函数中采样需调制的正弦波的当前值(该值事先通过计算后制表放入FLASH中),作为产生SPWM波的寄存器中比较寄存器的值。定时器计数值大于比较寄存器的值时,输出低电平,定时器计数值小于比较寄存器的值时,输出高电平,从而产生SPWM波。
图2中,在tA和tB时刻比较寄存器的值分别为:
式中:EvaRegs.CMR1为比较寄存器的值;EvaRegs.T1PR为定时器周期计数器的值(即为三角波的幅值);a为调制度。
3 交流恒流源结构设计
交流恒流源的设计主要分为硬件结构设计和软件流程设计。硬件结构设计以微处理器为核心,连接外围电路及模块,为算法的实现搭建平台和基础,对实现整个交流电的恒流过程呈现清晰化的结构指导。软件流程设计主要包括单神经元PID控制算法的程序实现以及SPWM波的产生过程,前文对相关的理论知识做了相应介绍,后续则应对该算法具体的软件实现做流程设计。
3.1 硬件结构设计
系统的硬件结构图如图3所示。AC-DC电路模块将220 V
交流市电整流滤波转换为平滑的直流电输出,H桥逆变模块则是将整流电路输出的直流电逆变为单相交流电,并经LC滤波电路滤除高次谐波含量后供给负载。控制电路模块中的微处理器TMS320F2812属于核心数据处理模块,主要运行整个交流恒流源系统来实现设定目标所需要的程序代码。交流互感器和采样调整电路组成的输出电流采样电路完成对输出交流的采样,并将采样结果输入微处理器。用户通过键盘可控制输出电流的大小,显示屏可显示实时输出电流。微处理器输出的SPWM控制信号需要通过光电隔离驱动电路处理后才能正常驱动H桥模块中的开关器件工作,这样做能够避免强电信号窜到弱电部分或弱电信号窜到强电部分,对系统造成干扰,增加系统的稳定性[13]。
3.2 软件流程设计
本恒流源系统的工作原理为使用单神经元PID算法控制SPWM波驱动逆变电路从而达到交流恒流的目的,因此本系统的软件设计主要包括单神经元PID算法和SPWM波的产生。要实现单神经元PID算法,首先,进行初始化,包括权重、误差、被控对象模型等;然后,通过采样电路获取误差量y(k),计算并得到单神经元PID控制算法的新输入,更新权重w1,w2,w3的值;接着将权重作求和处理,得出PID的具体值;最后,将该控制算法的输出结果与SPWM波相结合,完成单神经元的PID控制,其程序流程如图4所示。
SPWM波的产生采用的是不规则采样法,初始化工作完成后,计算调制波和载波之间交点的时间坐标,在中断服务程序中对计算结果作相应的处理分析,将单神经元PID控制输出作调制运算。最后根据计算结果控制各个逆变桥中逆变器件的开通与关断,即在GPIO口输出不同的電压值,从而得到相应的SPWM波,其程序流程如图5所示。
图5 生成SPWM程序流程
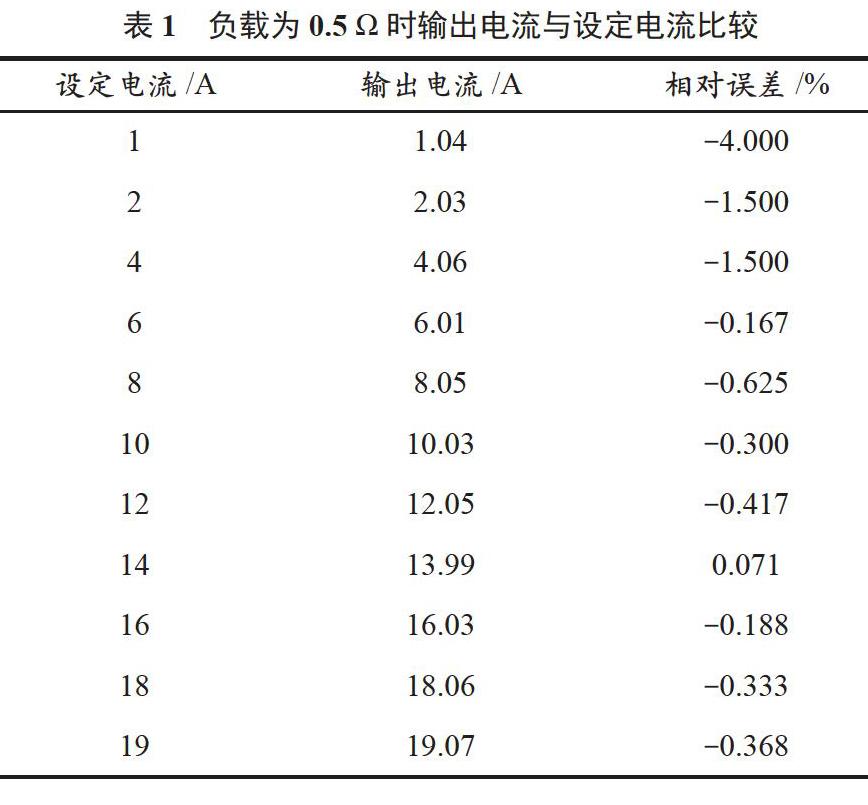
4 实验结果及分析
实验结果如表1~表3所示。单从1个表可以看出,输出电流值可以很好地稳定给定的电流值。结合3个表可以看出,输出的电流值几乎不随负载的变化而变化,负载较小时,输出电流值略小于给定值;负载较大时,输出电流值略大于给定值。
5 结 语
本文设计的交流恒流源采用单神经元PID作为控制算法,对采用不对称规则法生成的SPWM波进行调制,然后通过驱动电路和逆变电路,达到电路恒流的目的。单神经元PID克服了传统PID参数固定的缺点,更能适应输入和负载的改变。实验结果表明,本文所设计的恒流源系统能够很好地跟踪输入和适应负载的变化。
参 考 文 献
[1]郁红兵.基于SPWM的大功率交流恒流源系统研究[J].机电技术,2014(3):53-55.
[2]张帆.一种交流恒流电源的设计[J].电工电气,2016(7):19-22.
[3]张少煌,黄金池.一种基于功率开关的大功率恒流源[J].传感器世界, 2014(7):20-24.
[4]杨松,李艳芳,徐欣歌,等.基于H桥及SPWM调制的大功率交流恒流源[J].机电技术,2011(3):80-82.
[5]黄雷,贾兴,于治国,等.高稳定度大功率交流恒流源设计[J].国外电子测量技术,2009(3):64-66.
[6]张燕妮.改进型神经元PID的大功率恒流源控制器设计[J].电源技术,2013(9):1618-1620.
[7]刘金琨.智能控制[M].2版.北京:电子工业出版社,2009.
[8]任小洪,贺映光,方刚.DSP生成SPWM波的一种设计方法[J].工业控制计算机,2011,24(1):95-96.
[9]俞建军,江先志.一种新型的波峰波谷平均值SPWM采样法[J].成组技术与生产现代化,2016(2):54-58.
[10]陈丽虹.基于ARM和SOPC的EIM电性能实验用多波形逆变控制器装置研制[D].桂林:桂林理工大学,2014.
[11]冯晓星.基于虚拟仪器的SPWM信号源的研究[D].合肥:合肥工业大学,2007.
[12]陈伟科.太阳能电池板微型逆变电源逆变驱动控制研究[D].石家庄:河北科技大学,2017.
[13]谢子青.光电隔离抗干扰技术及应用[J].现代电子技术,2003,26(13):33-34.
