基于三维激光扫描技术爆堆体积测量与计算
2019-09-24刘士彪王玉良程浩杰
刘士彪, 王玉良, 罗 洵, 程浩杰
(1.江西理工大学 建筑与测绘工程学院,江西 赣州 341000;2.江西铜业集团有限公司 德兴铜矿,江西 上饶 334000)
1 引言
在金属矿山的开采中,受开采设备,爆破技术以及现场工作人员等不确定因素的影响,容易造成爆堆周边欠挖,导致大量的矿石丢失,极大影响矿山的经济效益和开采寿命。因此,在矿山开采中爆堆体积验收测量与计算是一项重要的日常工作。传统的测量技术对爆堆体积测算精度较低,会影响矿石的回收率,随着三维激光扫描技术的快速发展,逐步成为空间数据获取的技术手段,将三维激光扫描仪技术应用在爆堆体积计算中[1],相对于传统方法,更快速、高效、操作简单。爆堆体积的计算精度与矿山资源回收密切相关,间接影响矿山采收率、矿石回收率和综合利用率,影响矿山的可持续发展。
2 爆堆体积量算原理
爆堆体积测量计算的目标求取一定范围内矿石的体积差,而其关键在于爆前现状和爆后爆堆地形的表达。三维激光扫描仪具有快速性、不接触性、动态等特性,可以大面积快速高分辨率地获取被测对象表面的三维坐标数据。因为爆后爆堆地形是无态、不规则的,传统的测量方法不能准确的表达出来爆堆形态,三维激光扫描仪每次可以快速获取几十万个爆堆表面的特征点,能够细致的描述爆堆面变化情况,构建精细的爆堆模型,计算出准确的爆堆矿方量。它特别适用于测算体积在动态变化的矿堆,能够动态监测出准确的矿石方量的变化量[2]。基于三维激光扫描仪的爆堆体积量测,即利用激光测距原理[3],通过计算脉冲或者相位时间差,推算出扫描中心距离目标的斜距,然后用同时记录的激光光束的水平角和垂直角度来求解物体表面上激光光斑的三维坐标,同时记录激光点的反射强度值。基于获取爆堆表面海量点云进行点云配准、去噪、空洞修补和三维建模等一系列的操作,即可求取爆堆体积[4]。
3 爆堆体积量算流程
三维激光扫描爆堆体积计算主要分为爆堆点云数据获取、点云数据预处理和数据分析与计算三大步骤,其中爆堆点云数据获取部分包括控制点的选择、三维点云的采集和全站仪测量站点坐标获取等;点云预处理包括点云配准、去噪、抽稀、剔除大型机械、点云空洞的修补、爆堆裁剪和构建爆堆三维模型;数据分析与计算包括爆堆边界轮廓线提取、爆堆体积计算和体积对比验证。具体流程如图1所示。
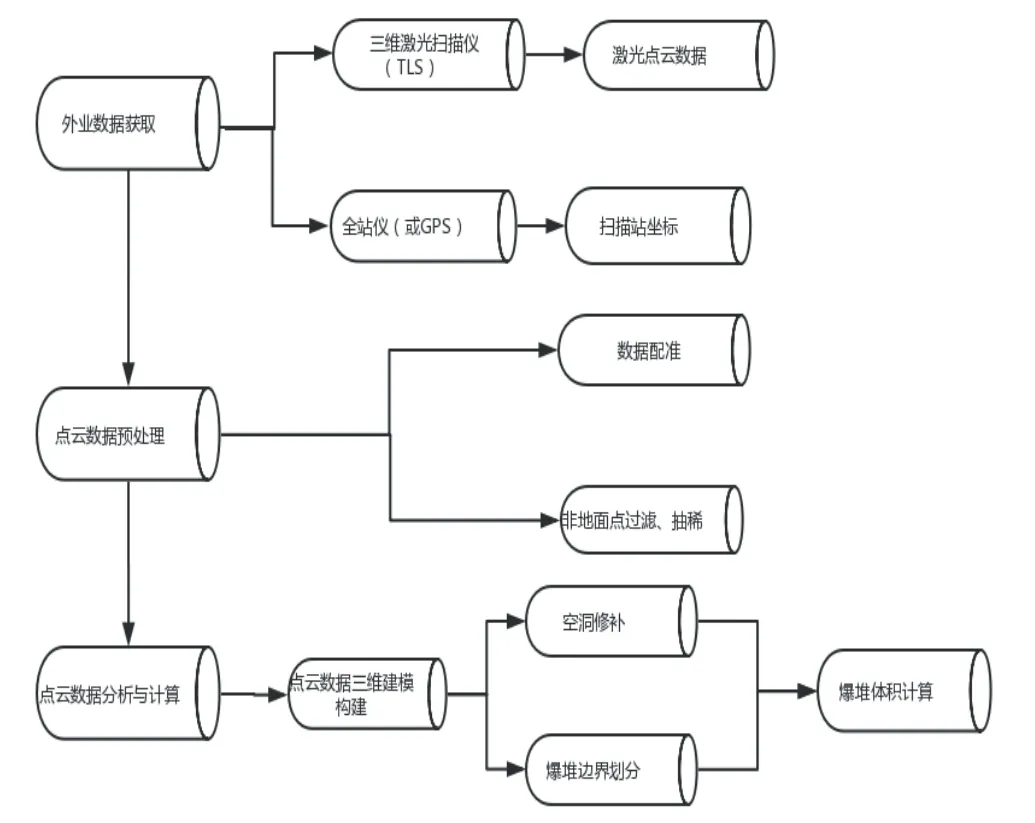
图1 爆堆体积计算流程图
4 工程实例
德兴铜矿位于德兴市北东68°方向直距约18km,属于德兴市泗洲镇管辖。矿区有公路直通德兴市,行程25km;有铁路与皖赣铁路乐平站相通,行程68km,交通方便。矿区比较大,采用多台阶分区开采,台阶高度平均15m;矿山大型机械较多,开采量大,日采规模能力达13万t。本次研究采用Riegl VZ-1000三维激光扫描仪进行爆堆表面点云数据的获取。爆堆区共设6个三维激光扫描站点,同时,采用徕卡全站仪获取三维激光扫描站点的绝对位置,来配合解决三维激光扫描多站点云数据配准问题。通过对获取的爆堆点云数据进行配准、去噪、抽稀、裁剪、三角网构建和建立爆堆的三维模型,进而精确求取爆堆体积和表面积。
4.1 数据获取
三维激光扫描时,采用的基本流程:
(1)扫描站的选取。综合考虑尽量选取最少的扫描站实施激光点云数据获取,而且尽可能要保证整个爆堆点云数据的覆盖。
(2)扫描站点绝对坐标的获取。使用全站仪采用后方交会进行获取站点的绝对坐标,将多站点云数据配准整合形成完整的爆堆点云数据,进而转换到矿山坐标系下。
(3)扫描仪参数设置。为了具有对比性,所有测站均设定为相对同的三位激光扫描参数,即水平和垂直方向扫描密度0.004m,视角范围90°~270°,单站扫描时间3.5min。
4.2 点云预处理
激光点云预处理主要包括点云配准、点云去噪、剔除大型机械、点云抽稀、构建爆堆的三维模型和爆堆体积计算等操作。
(1)点云配准。主要是将三维激光扫描仪的工程坐标系转换到矿山坐标系下。采用基于控制点坐标进行配准,直接利用Riegl三维激光扫描仪自带Riscan Pro软件,导入全站仪测得扫面站点的绝对坐标进行多站点云配准[5-7]。如图2所示
(2)点云裁剪及噪点和大型机械剔除[8]。由于数据是整体扫描没有框选范围,导致会产大量冗余的数据,采用创建Polydata进行裁剪,这样既保留了原始数据提取出了爆堆有用的数据,Polydata点云数据含有反射率属性,根据反射率大小设置阈值进行噪点去除。
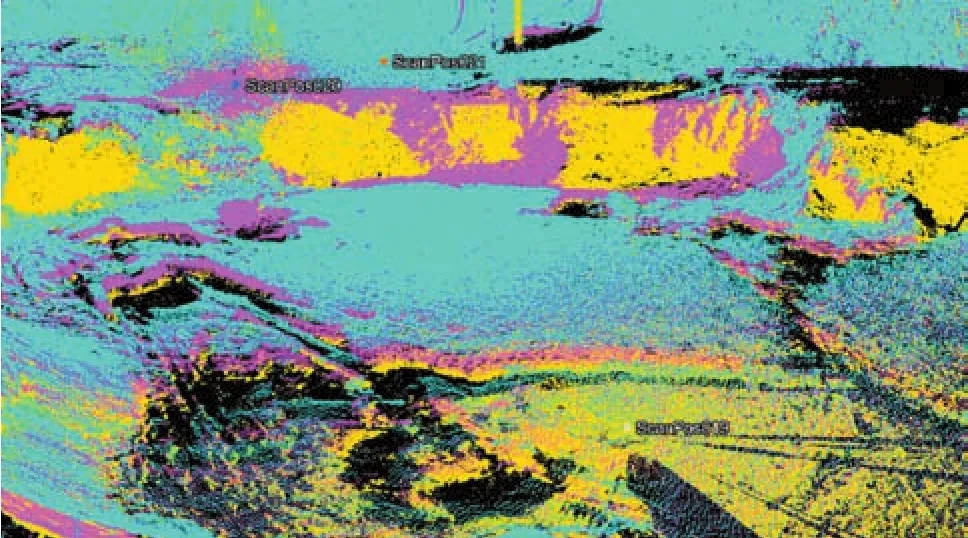
图2 基于控制点的多站配准
(3)大型机械设备剔除。运用Terrain filter 命令,在设置最小物体进行剔除。使用Surface Comparison命令对比点云数据与粗糙的网格模型进行比较,即可剔除大型机械设备。图3、图4对比如下:
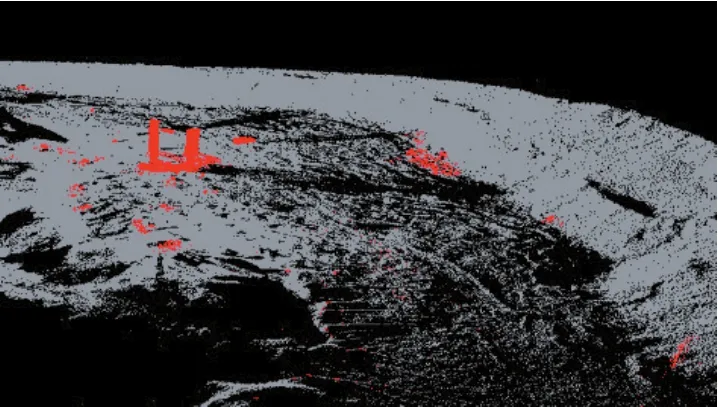
图3 未剔除大型机械
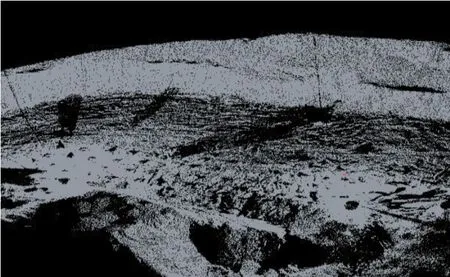
图4 剔除大型机械
4.3 三维建模
利用Riscan Pro平台对点云数据进行三维模型的建立步骤如下:
(1)在三维Riscan Pro软件中对需要三角化的点云进行选取;
(2)使用三角化工具对点云三角化的参数进行设置,其参数包括最大边长,最大倾角,最小内角,通过对其参数不断调整,获得三角化的表面模型;
(3)最后对三维模型进行光顺和平滑。
4.4 爆堆体积计算
基于爆堆三维模型建立的基础上,创建一个基准面,选中 DEM 模型数据,点击 (measure volume&surface area)按钮,在接下的窗口中CALCULATION MOOD 下勾选 Raster+triangulation,在 OUTPUT 中勾选 volume 与 Surface area,紧接在PARAMETERS 的 Reference plane 中选择创建的基准面,同时勾选 Create volume(s) as triangulated mesh,Raster size(m)中设置光栅大小(根据点云密度),点击 OK。
4.5 对比分析
用Riscan Prosan三维建模计算体积与矿山用的矿量量算软件用南方CASS进行对比分析。通过用全站仪和三维激光扫描仪获取的数据分别构建不规则三角网,设置开挖高程面,得到TIN和DEM,进而进行体积计算。
传统软件Cass进行爆堆体积计算和三维激光扫描方式均以台阶高度作为基准面,计算得到爆堆体积计算如图5、图6所示。
图5 cass构建的TIN

图6 Riscan Pro构建的DEM
从获取爆堆表面的数据个数指标上来看,全站仪采集的点数就200多个,而地面三维激光扫描仪采集的点云数据上百万个;从数据获取的时间指标上来看,全站仪采集数据所用时间为3h,是地面三维激光扫描仪的3倍;从效率指标对比来看,采用地面三维激光扫描方式内外业所用时间1h,远远低于全站仪数据采集处理时间,大大提高了作业效率,节省了人力成本。
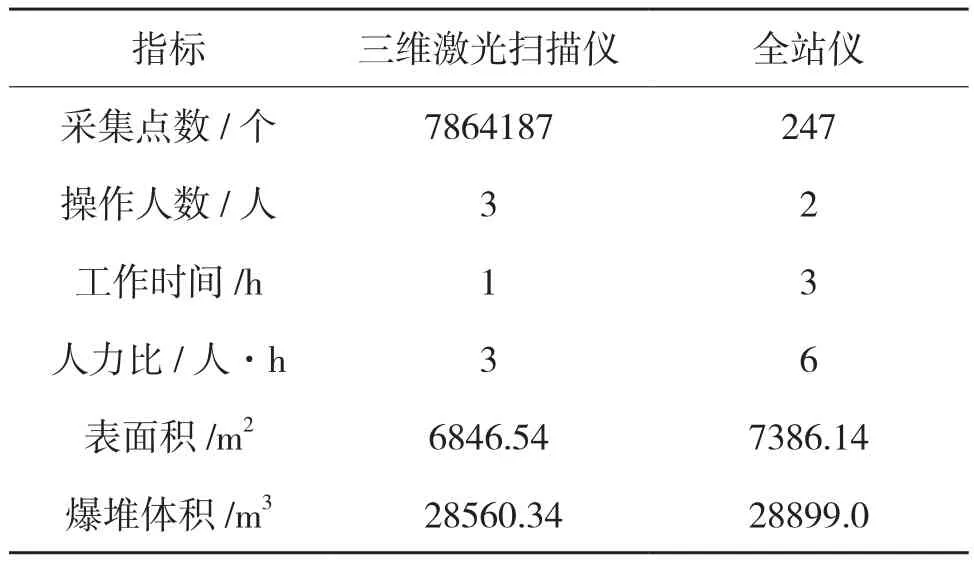
表1 爆堆量算指标统计表
从计算结果上来看,若以南方CASS软件计算的为参照,通过点云三维建模的方式得到的爆堆体积误差为1.21%,小于3%,符合工程测量规范要求。因为矿区地形复杂多变,大型机械比较多,为了安全考虑,有些爆堆难以到达,相比于传统的全站仪测量方法,地面三维激光扫描仪的优势更加突出。
5 结束语
本文所用的方法大大提高了测点的速度和密度,实际测量中,三维激光扫描仪的扫描间距达到毫米级,增加了测点密度。RieglVZ-1000 三维激光扫描仪扫描速度300000点/s,每一站扫描约3min,大大提高了测量速度。从采集的点数、作业时间、投入的人力等指标对比了地面三维激光扫描与传统的测量方法在爆堆体积测量与计算的优缺点。结果表明,地面三维激光扫描方式效率高、工作时间短、人力投入少,而且爆堆体积精度满足工程测量的规范。地面三维激光扫描得到的点云数据不仅仅用于爆堆体积的计算,还可以解决矿区地形测量、钻孔布置、矿区开采设计等问题。避免重复测量工作为建成数字化、信息化、智能化矿山提供了一种新的技术手段。
