高精度GNSS/INS组合定位测姿系统设计及实现
2019-09-21智奇楠周俊李枭楠刘鹏飞马国驹
智奇楠周俊李枭楠刘鹏飞马国驹
高精度GNSS/INS组合定位测姿系统设计及实现
智奇楠1,2,周俊3,李枭楠1,2,刘鹏飞1,2,马国驹1,2
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081;3.陆军航空兵学院陆军航空兵研究所,北京 101121)
GNSS/INS组合定位测姿系统实现了卫星导航系统与惯性导航系统的优势互补,提高了导航系统的精度和可靠性,对测绘车GNSS/INS组合定位测姿系统典型设计方案进行了详细阐述,介绍了系统设计需求、分机设计方案及其系统实现和测试情况,该系统满足专用测绘车高精度导航应用,可作为各类GNSS/INS组合定位测姿系统的方案设计参考。
组合导航;定位测姿系统;卫星导航系统;飞行器
GNSS/INS组合定位测姿系统实现了卫星导航系统与惯性导航系统的优势互补,提高了导航系统的精度和可靠性,并且能够输出位置、速度、姿态和时间全维测量信息,随着GNSS的应用普及和惯性器件成本的逐步降低,GNSS/INS组合导航系统显示出巨大的应用潜力,成为各类车辆、飞行器、行人导航的一个最主要的技术实现方案。
本文选择了一款典型的测绘车移动测量系统平台上的定位测姿系统为原型详细阐述GNSS/INS组合定位测姿系统设计。该系统采用多天线GNSS/INS组合导航处理,配备差分基准站、数据通信链路以及高精度组合导航数据处理软件,可测量测绘车的位置、速度和姿态信息,可满足专用测绘车高精度导航应用需求。
1 系统设计需求与现状
测绘车GNSS/INS组合定位测姿系统是测绘车移动测量系统中的核心部件之一,与CCD相机、激光雷达、全景相机等测量传感器结合起来,装载在测绘车上,可实现移动测绘功能。该系统提供的位置、速度、姿态和时间信息精度是各测量传感器数据处理的时间、空间参考基准,是保证移动测量数据处理精度的基础。测绘车移动测量系统是高精度GNSS/INS组合定位测姿系统的最典型应用场景之一,需要获取高精度的位置、速度、姿态信息和实现高精度的时间同步;设备使用环境为城市道路环境,卫星导航信号复杂多变;系统应用不仅需要实时高精度差分处理,还需要进行事后数据处理,以获得更高的精度。因此,从系统配置上看测绘车GNSS/INS组合定位测姿系统是最全面的。另外,在系统使用中存在以下难点:①城市道路环境卫星导航信号遮挡、衰落严重,对接收机性能提出了较高要求,需要接收机具备更高的捕获速度、跟踪灵敏度;②惯导单元是核心部件之一,其测量精度与定位测姿系统性能直接相关,提升惯性传感器精度是系统精度保障的关键;③组合定位测姿系统精度高,动态条件下精度测试难度大。
移动测量系统中的GNSS/INS组合定位测姿系统目前均采用差分GNSS和INS、DMI等多导航源的集成实现,也称为高精度POS(Position and Orientation System)系统。国外在高分辨率对地观测需求的牵引下,高精度POS技术得到了快速发展,美国、加拿大、瑞士、德国等发达国家均已经形成了系列产品,并广泛应用于高分辨率对地观测和移动测量领域。
目前,国际上的POS产品已经达到了很高的技术水平,其中NovAtel和Trimble公司产品在国内拥有较多的客户。另外,德国的IGI公司等都有应用于移动测量或者航空摄影测量的GNSS/INS组合导航系统,该类型组合定位系统大多采用了紧组合技术,具备高精度基准站以及数据后处理软件,系统可以达到非常高的精度。典型高精度POS系统产品性能指标如表1所示。
2 系统组成
高精度GNSS/INS组合定位测姿系统组成及系统连接关系如图1所示。
高精度GNSS/INS组合定位测姿系统由惯性测量单元分系统、组合导航接收机分系统及组合导航数据处理软件三部分组成。
2.1 惯性测量单元分系统
惯性测量单元主要功能是惯性信息的采集输出以及惯性导航解算。惯性测量单元主要包括电源转换单元、3个正交安装的陀螺仪、3个正交安装的加速度计、数据采集处理电路及必要的辅助电路。
2.2 导航接收机分系统
导航接收机分系统包括基准站和流动站两部分。
基准站接收机由基准站接收机、天线及数传设备组成,可完成卫星导航观测信息测量、高精度载波相位差分修正信息测量与传输。
流动站接收机由组合导航接收机主机、主天线、从天线和数传设备组成。其中,组合导航接收机主机包括卫导接收机核心板及组合导航处理板,具备双天线定向功能,组合导航处理单元接收IMU测量数据,并具有捷联惯导解算、组合导航滤波、数据存储等功能。
表1 典型产品性能指标

厂商NovAtelTrimbleIGI mbH 设备型号SPAN-ISA-100CApplanix POS LV 610AEROcontro Compact FOG-Ⅲ GNSS有效定位精度水平1 cm,垂直2 cm XY为2 cm,Z为5 cm2 cm 航向角精度0.01°0.015°0.007° 水平角精度0.007°0.005°0.003° GNSS失锁60 s定位精度水平4 cm,垂直3 cmXY为10 cm,Z为7 cm6 cm 航向角精度0.01°0.015°0.007° 俯仰角精度0.007°0.005°0.003° 数据更新率200 Hz200 Hz600 Hz 处理软件Inertial Explorer GrafNav/GrafNetApplanix POSPac MMSAEROoffice,GrafNav和BINGO30
2.3 组合导航数据处理软件
组合导航数据处理软件包括2部分功能:数据采集监控和数据后处理。数据采集监控部分主要用于实时采集高精度GNSS/INS组合定位测姿系统输出的数据、监控系统的运行状态、对系统进行参数等配置控制。数据后处理功能主要用于事后数据处理,包括GNSS事后差分定位、GNSS/INS事后组合滤波等。
3 工作原理
系统首先完成初始位置和姿态的获取。GNSS接收机开机后通过天线接收北斗卫星导航系统和GPS系统卫星的信号,射频模块完成信号的下变频处理,转换为中频信号,在基带信号处理单元中完成基带信号处理,获得测距信息和导航电文解析,数据处理单元完成定位解算,获得初始位置;利用初始位置和惯性导航传感器测量的地球自转角速度进行姿态初始化。
在完成位置初始化和姿态初始化之后,系统进入组合模式,在组合模式中捷联惯导解算单元利用IMU测量的载体角速度和比力信息,得到惯性导航解。GNSS基带信号处理单元利用中频信号与本地生成的码和载波进行相关累积或非相关累积,得到基带I、Q信号,通过环路跟踪控制获得伪距、伪距率的测量信息,组合处理单元利用伪距伪距率测量信息以及惯性导航解算的位置速度姿态信息进行数据滤波,实时修正惯导解算误差,得到高精度位置、速度、姿态、时间信息。
实时RTK数据处理软件可处理同一时刻基准站数据与车载流动站接收机数据,通过差分操作消除测量误差并进行定位解算。实时RTK技术的关键是车载接收机在运动状态下确定整周模糊度,实时RTK技术能够达到厘米级的定位水平。
通过里程计和双天线测姿等辅助定位方法保障在恶劣条件下连续、可靠地输出位置、速度、姿态数据。比如静态条件下的双天线测姿与零速修正辅助导航数据测量;动态条件下GNSS信号无覆盖时,里程仪、方向数据辅助惯性的测量,可提升系统可用性。
4 系统详细设计
4.1 惯性测量单元分系统设计
惯性导航传感器的选型直接影响系统指标,根据应用需求,采用光纤陀螺作为角速率传感器,采用石英加速度计作为加速度传感器,通过组合滤波技术可以实现高精度的位置、速度、姿态测量。惯性测量单元分系统原理如图2所示。

图2 惯性测量单元分系统原理框图
惯性测量单元分系统采用光纤陀螺作为敏感器,通过光电解调电路,将光信号转换为数字信号,输出角增量,通过串口通讯提供给导航计算机电路,经过温度补偿后进行对外输出。石英挠性加速度计是单自由度的闭环式挠性机械摆式加速度计,当沿加速度计的输入轴有加速度作用时,差动电容传感器的电容值发生变化。伺服电路检测到这一变化,并把它变换成相应的输出电流,该电流的大小与输入加速度成正比。信号采集电路中首先对三路加速度计电流输入信号进行I/V变换,采用精密电阻对加速度计电流信号进行采集。
陀螺仪测量的角速率信息和加速度计测量的加速度信息需要通过数据处理才能提供给导航系统使用。在系统整机集成完成后,需要对系统误差和传感器误差参数进行标定,可通过实验室标定,从而获得陀螺加表零偏、比例因子、交叉耦合以及温度误差系数,在数据采集与处理程序中对上述系统误差进行补偿后得到惯性导航传感器测量数据。在完成载体姿态变化和速度变化信息测量和补偿之后,对外输出惯性测量信息。
4.2 导航接收机分系统设计
4.2.1 基准站接收机及天线
基准站接收机天线采用扼流圈天线,能够接收北斗/GPS卫星信号,生成高精度观测值,包括伪距测量值、载波相位观测值以及信号载噪比等,一方面可实现对测量信息的存储,为数据后处理提供数据;另一方面,可生成并播发差分修正信息,辅助组合导航接收机获得高精度导航结果。
4.2.2 流动站接收机
流动站接收机由组合导航接收机主机、主天线、从天线和数传设备组成。其中,组合导航接收机主机采用组合导航处理板+接收机核心板的实现方式。接收机核心板卡采用模块化设计,主要包括射频单元、基带信号处理单元、数据处理单元和电源转换单元等,实现GNSS信号接收、定位解算、RTK差分处理等功能。组合导航处理板主要实现电源转换、电平接口转换、数据预处理、捷联惯导解算、组合滤波、数据存储等辅助功能。组合导航接收机硬机组成如图3所示。

图3 组合导航接收机硬机组成
4.2.3 数传设备
数传设备采用移动4G数据传输模块实现基准站与组合导航接收机之间的双向通信。
4.3 组合导航数据处理软件设计
组合导航数据处理软件包括两部分功能:数据采集监控和数据后处理。数据采集监控部分主要用于实时采集高精度GNSS/INS组合定位测姿系统输出的数据、监控系统运行状态、对系统进行参数配置控制。数据后处理功能主要用于事后数据处理,包括GNSS事后差分定位、GNSS/INS事后组合滤波等。
数据采集监控模块由GNSS卫星仰角方位角信息显示模块、卫星原始观测信息显示模块、卫星多普勒信噪比信息显示模块、卫星伪距残余误差信息显示模块、陀螺、加速度计原始输出波形显示模块、GNSS以及惯导原始数据存储模块等组成。
高精度数据后处理模块由GPS/BDS多模RTK定位解算模块、GPS/BDS多模单点定位解算模块、GPS/BDS伪距差分以及DGNSS定位解算模块、纯惯性导航定位测姿解算模块、GNSS/INS前向滤波数据融合算法、GNSS/INS后向平滑数据融合算法、定位解算精度评估功能组成。
软件数据流如图4所示,实时测量过程中软件通过串口实时接收显示卫导和惯导的数据采集状态。数据采集结束后,软件能够对数据进行格式转换以及后处理,输出高精度的位置、速度、姿态信息。

图4 软件数据流结构
5 组合定位测姿系统测试
组合定位测姿系统研制完成后,采用高精度测试基准进行动态跑车试验验证系统精度。将组合定位测姿系统固定安装在测试车中,天线置于车顶,增加高精度的位置姿态测量系统基准,在初始位置经过较长时间测量,获得初始位置,完成系统初始化,然后开始进行动态测试,选取路线选择有高低起伏的路径,并进行环形路径测试,整个路径起始位置和结束位置形成闭合路径,可以更加直观地验证定位精度。组合定位测姿系统和高精度位置姿态测量系统采用同一个天线。组合定位测姿系统接收天线的射频信号和BD/GPS车载动态RTK数据处理分系统提供的观测信息,组合定位测姿系统正常定位,输出高精度导航信息。高精度位置姿态测量系统采集惯性导航信息、卫星导航信息,并与基准站接收机测量获得的观测信息统一在高精度数据处理软件中做数据融合处理,获得高精度基准信息。与深组合系统解算的位置、速度、姿态信息进行比较,评估其性能。车载动态测试环境如图5所示。
为了验证高精度组合测姿算法的正确性,进行了实际的跑车测试实验,跑车运行过程中搭载了高精度的激光惯导作为参考,两个惯导通过转接板进行牢固连接,保持姿态关系的相对稳定。跑车试验前架设基准站,跑车过程中同时保存基准站和流动站的原始数据用于事后处理。事后采用商业软件Applanix POSPac计算的组合导航结果作为参考基准,评估研制的GNSS/光纤惯组组合系统精度,通过计算误差得到位置、速度以及姿态误差,测试实物如图6所示,对误差进行了统计,统计结果如表2所示,均满足移动测绘车对位置、速度以及姿态信息的精度要求。
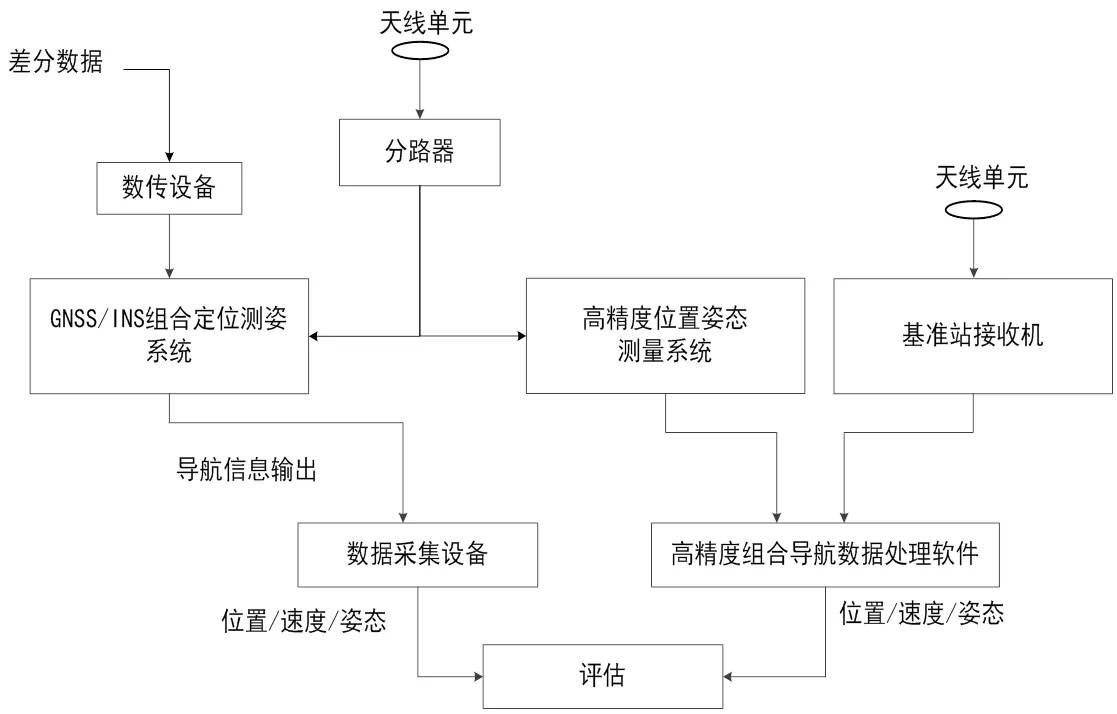
图5 车载动态测试环境

图6 测试实物图
表2 导航精度统计表
测试方法位置精度/m速度精度/(m/s)水平姿态/方位角/deg 实时导航过程(单点定位组合)1.440 30.0310.008/0.035 后处理0.040.0050.005/0.020
6 结束语
通过对GNSS/INS组合定位测姿系统的详细设计,实现了高精度定位测姿,经过跑车测试验证,系统精度可以满足测绘车移动测量系统使用需求。该方案可以在各类航空摄影测量系统、移动测量系统、无人驾驶汽车、无人机等位置姿态测量应用领域取得广泛应用。
[1]王新龙.SINS/GPS组合导航技术[M].北京:北京航空航天大学出版社,2014.
[2]汤勇刚,吴美平.载波相位时间差分/捷联惯导组合导航方法研究[M].北京:国防工业出版社,2016.
[3]马国驹,蔚保国,智奇楠.高精度组合导航及其测绘车应用技术[J].测绘科学,2015(12):144-148,152.
[4]王立兵,马国驹,贾瑞才.GNSS/INS高精度反向平滑滤波算法在移动测图中的应用[J].兵器装备工程学报,2019(3):112-115.
[5]李枭楠,智奇楠,刘鹏飞.基于载波相位测量的多天线GNSS/INS组合测姿方法[G]//中国卫星导航学术年会组委会会议论文集.上海:第八届中国卫星导航学术年会,2017:107-108.
TN96
A
10.15913/j.cnki.kjycx.2019.17.018
2095-6835(2019)17-0042-04
智奇楠(1983—),男,主要研究方向为组合导航技术。
〔编辑:张思楠〕
