基于交叉耦合结构的同步控制器设计*
2019-09-19盛贤君王立凡
盛贤君,王立凡
(大连理工大学 电气工程学院,辽宁 大连 116024)
0 引言
在加工制造业,尤其是数控机床(CNC)加工中,多轴伺服系统的高精度同步控制始终是一个研究热点[1-2]。在多轴控制系统的设计过程中,主要考虑对机床到位精度产生影响的两类关键因素。第一种是系统控制模型的参数摄动、不完全建模、负载变化及随机扰动对控制精度的影响[3-4];另一种是在高精度位置控制过程中,不得不考虑的非线性摩擦力的影响[5]。针对第一类因素,文献[6-7]提出了滑模变结构控制(SMC)来提升系统的鲁棒性,这类滑模变结构控制包含趋近运动和滑模面运动两个阶段。然而传统的SMC存在趋近速度和系统抖振幅度的权衡问题,且跟踪误差不能够在有限时间内收敛到零[8]。文献[9-10]提出了终端滑模控制(TSMC)策略,实现跟踪误差的有限时间收敛。针对第二类因素,文献[5, 11]根据达尔摩擦力模型设计了摩擦力补偿器,但建模过程需要大量的离线实验数据进行参数辨识。文献[12]根据局部摩擦力模型提出了一种有效地在低速下实现补偿的控制器,但这种方法仍需要对模型的参数进行离线辨识。自适应的模糊系统理论上可以以任意精度逼近实际系统,因此可以用于存在建模困难的摩擦力补偿器的设计当中。同时,交叉耦合控制结构从提出后被广泛应用于改善系统的同步性能[13-14]。
本文介绍了终端滑模面的设计过程并给出滑模控制输出表达式,简要阐述了模糊系统的组成及从精确量输入到最终输出的模糊工作原理并说明了自适应模糊控制的设计特点。提出一种基于交叉耦合结构的终端滑模-自适应模糊同步控制器,以提高系统跟踪精度和同步精度。根据现有双轴参数在Matlab/Simulink仿真平台上搭建模型,通过仿真实验对比传统PID控制方法与本文控制方法在持续扰动下的控制效果。
1 跟踪控制器设计
1.1 终端滑模控制器
滑模变结构控制具有较好的鲁棒性,响应迅速、对系统参数的摄动不敏感且抗扰动能力强。其控制设计难点之一是设计滑模面。根据系统状态相对滑模面的位置有目的地改变控制输出,迫使系统状态一步步趋近滑模面并最终稳定。普通的滑模控制,在系统达到滑动模态后,跟踪误差会渐近收敛,通过对滑模面参数的设计可以调整渐近收敛的速度,但由数学证明可知该类变结构控制方法无法在有限时间内使系统状态收敛到零。通过将非线性函数引入滑动超平面的设计,构造出的终端滑模面,可以使得系统状态在有限时间内收敛到零,且收敛时间可以根据需要进行调整。
假设n阶非线性系统为:
y(n)=f(y(n-1),…,y′,y,t)+Δf(y(n-1),…,y′,y,t)+
b(y(n-1),…,y′,y,t)u+d(t)
(1)
式中,y∈Rm为输出;u∈Rm为控制输入;f∈Rm和b∈Rm×m为已知系统状态函数;Δf和d分别为系统未建模部分和外部扰动。
令x1=y,x2=y′,…,xn=y(n-1),则系统可表示为如下形式:
(2)
其中,X=[x1x2…xn]T。
未建模部分Δf(X,t)和外部扰动d(t)满足:
|Δf(X,t)|≤F(X,t),|d(t)|≤D(t)
其中,F(X,t)和D(t)均大等于零。
设滑模面方程为:
σ(X,t)=CE-W(t)
(3)
式中,C=[C1C2…Cn]中的元素均为正常数。W(t)=CP(t),P(t)=[p(t)p′(t) …p(n-1)(t)]T。
p(t)满足以下三条假设:
(1)p(t):R+→R,p(t)∈Cn[0,∞),p′,…p(n)∈L∞;
(2)对于常数T>0,p(t)在[0,T]时间段内有上界,且p(0)=e(0),p′(0)=e′(0),…,p(n)(0)=e(n)(0);
(3)p(t)在[0,∞)上n阶可微。
选取函数p(t)为:

(4)
式中,参数ajl可以由三条假设求得,T为设置的收敛时间。
最终,终端滑模控制输出为:

(5)
本文设计的终端滑模控制器的稳定性可以通过构造合适的李雅普诺夫函数进行证明。由于本文侧重于这种控制器的应用,故不在此对稳定性进行过多讨论。
1.2 自适应模糊控制器
为了克服非线性摩擦力对单轴跟踪精度影响,需要设计一种在线摩擦力补偿控制器。然而,由于机床结构、所使用的润滑油型号以及高低速运行工况等因素,使精确的非线性摩擦力模型得难以得到。故此,选择带有自适应算法的模糊控制器来进行摩擦力补偿。
模糊逻辑系统主要由模糊产生器、模糊规则库、模糊推理机和模糊消除器组成。模糊规则库由 “如果…则…”形式的若干条模糊规则构成。多输入多输出系统的模糊规则可表示为:


U=U1×U2×…×Un,Ui∈R
V=V1×V2×…×Vn,VJ∈R
首先,通过模糊产生器将采样数据映射到模糊子集U。接着,根据模糊规则库当中的规则,由模糊推理机将模糊子集U映射到模糊子集V上。然后,通过模糊消除器所定义的解模糊方式将模糊子集V映射到实际输出。采用中心平均法的模糊控制器的输出为:

(6)

(7)
(8)
其中,ξ(x)=(ξ1(x),…,ξM(x))T为模糊基函数向量。自适应模糊系统理论上可以以任意精度逼近实际系统,本文将其作为运动控制中的摩擦力补偿器。
2 交叉耦合同步控制器设计
尽管通过对单伺服轴的跟踪控制器设计可以使得其较好地跟踪参考输入,但并不能直接保证多轴间的同步误差在允许范围内。各伺服轴所带负载不同、外部随机扰动和未建模部分的影响,使得各轴的零状态冲击响应不尽相同,导致在相同参考输入情况下存在同步误差。并行控制和主从控制结构都无法做到在所有伺服轴间分享误差信息,而多轴耦合的控制结构可以通过误差信号的耦合,很好地将受扰动轴的扰动和系统传递函数等信息分享给其他参与同步运动的伺服轴,使得各伺服轴能够均衡参考控制量,提升同步程度。对于双轴而言,交叉耦合结构具有良好的同步控制效果。其结构如图1所示。
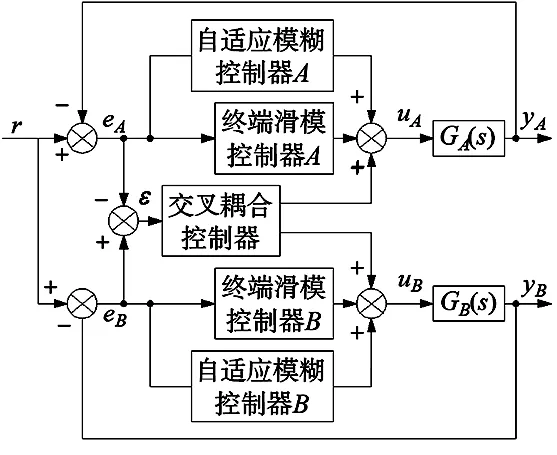
图1 基于交叉耦合的终端滑模-自适应 模糊同步控制结构框图
轴A和轴B的跟踪误差定义为:
eA=pAd-pAa
(9)
eB=pBd-pBa
(10)
定义同步误差εsyn为A、B两轴实际位置之差:
εsyn=pAa-pBa
(11)
当平行轴做镜像运动时pAd=pBd,将式(9)和式(10)带入式(11)可将同步误差表示为跟踪误差的函数:
εsyn=-eA+eB
(12)
为了得到较好的同步性能,采用PD控制器。值得注意的是,在参数试错过程中发现,由于交叉耦合控制结构在信息共享的同时也给改变了原系统的稳定性能。因此在同步控制器参数选取不当的情况下可能使得系统同步误差发散。
3 仿真与分析
使用Matlab/Simulink进行两轴同步控制算法仿真实验。根据实物实验平台A、B两个轴的零状态冲击响应数据,通过系统辨识得到从驱动器到滚珠丝杠副的状态方程分别为:
yA=xA1
(13)
yB=xB1
(14)
为了考察本文所设计的控制器的动态性能,选择幅值为1,角频率为π的正弦函数作为参考输入。图2和图3分别为在采用PID控制器和本文提出的终端滑模-自适应模糊控制器的情况下A、B轴的跟踪误差曲线。

图2 A轴在两种控制方式下的跟踪误差

图3 B轴在两种控制方式下的跟踪误差
可以看出,不同于PID控制器的响应曲线,本文控制方法A、B轴在5s之前均有一个自适应调整过程。当系统稳定跟踪后,相比传统PID控制,本文设计的控制方法至少将跟踪误差减小了83.20%,即使在系统初始阶段,新的控制方法也能更好地控制系统的跟踪误差。
对A轴施加幅值为3,角频率为2π的持续扰动,对B轴施加幅值为2,角频率为3/2·π的持续扰动。对比两种控制方法在并行控制和交叉耦合情况下,跟踪上述参考正弦信号的同步误差,如图4和图5所示。
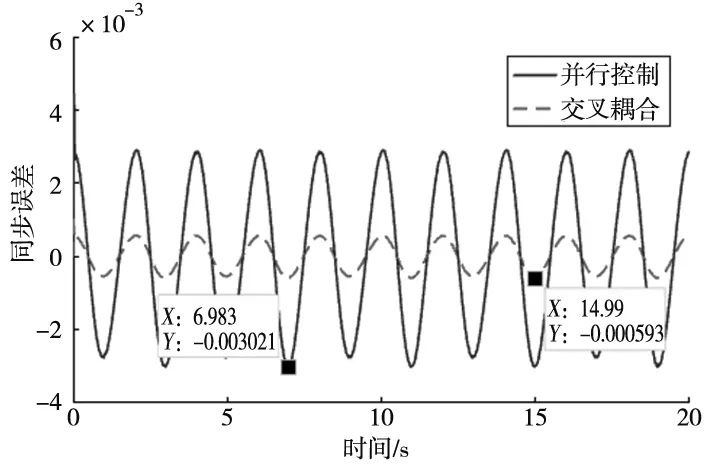
图4 PID控制下跟踪正弦信号的同步误差对比
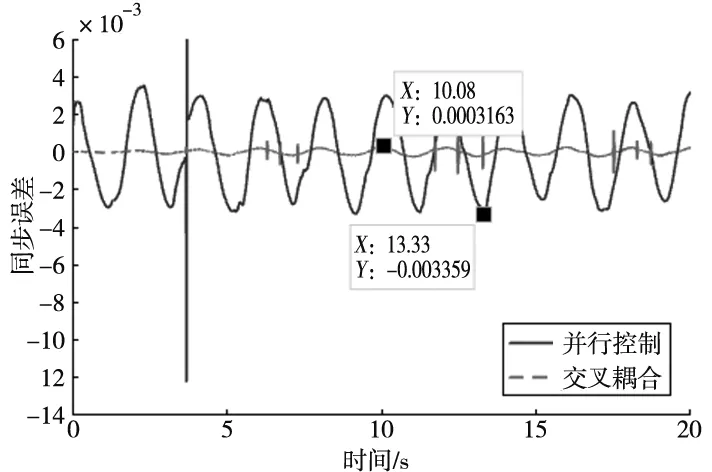
图5 终端滑模-自适应模糊控制下跟踪正弦信号的同步误差对比
可以看出,两种控制方法在并行控制下同步误差相差无几,这是因为同一种控制方法下对单轴的跟踪控制能力相似,所以两轴间响应之差也基本相同。不难看出交叉耦合控制结构确实能够提高同步精度,相比PID控制,终端滑模-自适应模糊控制方法将同步误差在减小了约43.36%,但受到某些扰动时误差曲线存在较多毛刺,这一点仍然值得优化。
4 结论
本文基于现代控制算法设计了终端滑模-模糊自适应跟踪控制器以提高单轴抗扰动能力和动态响应性能。采用交叉耦合的控制结构以提高镜像运动的两轴间同步精度。利用Matlab/Simulink仿真平台,模拟了在持续扰动下两轴跟踪正弦信号的同步运行过程,通过对比传统PID控制器的响应曲线,跟踪误差减小了至少83.20%,同步误差在减小了约43.36%,证明了所提出的控制方法能够更好地抑制扰动,提高伺服轴的信号跟踪能力并减小同步误差。