重构神经网络模型及开关磁阻电机恒转矩控制*
2019-09-19党选举伍锡如张向文唐士杰
党选举,陈 童,姜 辉,伍锡如,张向文,唐士杰
(桂林电子科技大学 电子工程与自动化学院,广西 桂林 541004)
0 引言
具有结构简单坚固、转子无绕组及磁性材料、调速范围宽、高可靠性等优点的开关磁阻电机(Switched Reluctance Motor, SRM)广泛应用于数控机床液压系统、采煤采矿等传动控制领域[1]。但其独特的双凸极结构和严重的磁饱和使其具有强烈的非线性特性,在低速运行时产生较大的转矩脉动,限制了SRM的推广与应用,因此SRM的转矩脉动抑制研究具有重大意义。
SRM的转矩脉动抑制方法除了改进电机结构参数[2],主要通过优化各种控制策略降低转矩脉动。直接转矩控制[3](Direct Torque Control, DTC)和直接瞬时转矩控制[4](Direct Instantaneous Torque Control, DITC)采用滞环直接控制各相的瞬时转矩跟踪参考转矩,但需要复杂的开关规则,并且忽略了电流的控制,可能造成电流的不可控[5]。转矩分配函数(Torque Sharing Function, TSF)策略[6-8]为维持瞬时合成转矩不变,通过TSF将总转矩平滑划分为三相转矩,再通过转矩—电流模型计算对应的三相控制电流对SRM进行控制。得到准确的转矩-电流模型对减小转矩脉动具有重要意义。文献[9]对转矩表达式反向推导出电流表达式,但结构复杂,参数难以准确得到。文献[10]采用查表法,根据瞬时转矩和转子位置查询对应的控制电流,文献[11]用神经网络离线训练得到转矩—电流模型,但是以上方法无法在线计算控制电流,实时性差。
SRM的转矩—电流模型不准确则无法准确计算恒转矩所需的控制电流,不可避免地产生较大的转矩脉动。该文根据SRM转矩、转子位置、电流之间的关系,设计一种新神经网络激励函数,更准确地刻画SRM强非线性特性,构建准确的转矩-电流模型。该激励函数能够体现SRM电流的基本变化规律,结构更接近SRM的固有特性,训练后的神经网络模型能够准确逼近SRM转矩-电流模型,计算恒转矩对应的三相控制电流对SRM进行控制,抑制SRM的转矩脉动。
1 SRM转矩输出特性
忽略磁饱和效应以方便计算与分析,SRM的线性电感模型[9]可由式(1)表示:
(1)
式中,m为SRM相数,T为瞬时合成转矩,Tk为第k相转矩,ik为第k相电流,Lk(θ)为第k相绕组的电感,θ为转子位置。
电机正转矩限制下,由式(1)可推导出SRM相电流表达式:
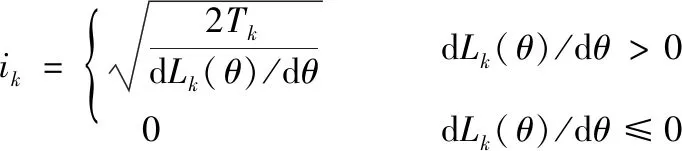
(2)
式(2)揭示了SRM转矩、转子位置、电流之间的关系,是设计重构神经网络模型的依据。
2 传统TSF转矩控制
传统TSF转矩控制如图1所示,速度误差经过PI控制器后得到参考转矩Tref。由于SRM需要周期性地换相,TSF对Tref进行分配得到参考相转矩,使SRM的瞬时合成转矩保持不变。参考相电流由转矩-电流模型根据参考相转矩与转子位置计算得到。

图1 传统TSF转矩控制系统框图
SRM换相时三相转矩应该满足下式:

(3)

文献[12]对比分析了常用的4种TSF:立方型、指数型、线性型、余弦型,其中立方型TSF具有较好的性能,其表达式如下:
fk(θ)=
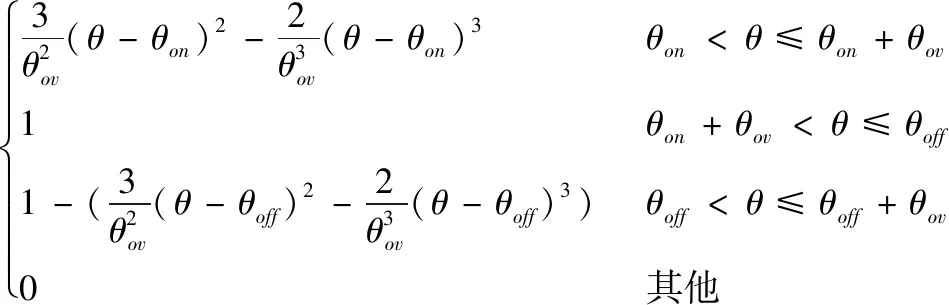
(4)
式中,θon为开通角,θoff为转矩开始减小时的关断角,θov为换相重叠角。
立方型TSF图像见图2。

图2 立方分配函数
SRM相邻两相TSF依次错开一个步距角θstep,θstep按下式定义:
θstep=360/(mNr)
(5)
式中,Nr为转子级数。
在开环的传统TSF转矩控制基础上,引入反馈和重构神经网络控制,其中隐含层激励函数根据式(2),即SRM电流基本变化规律设计。
3 神经网络模型构建与控制
具有良好自学习能力的神经网络常用于复杂非线性系统的控制及建模[13]。SRM控制器由重构神经网络模型和PD控制器组成,系统控制框图如图3所示。

图3 基于重构神经网络模型的SRM转矩控制系统框图
转子位置θ和参考转矩Tref经过预处理后作为重构神经网络的输入。由于SRM在一个转子周期τ内依次导通和截止,因此g(θ)先对θ进行预处理,将θ归算至[0,τ]:

(6)
式中,floor为向下取整函数,Nr为转子级数。
恒转矩下Tref为常值,因此令p(Tref)=1。
图3中两处分配模块均使用立方分配函数实现分配。p(Tref)分配模块的输出作为重构神经网络的输入,用于调节激励函数的形状,u分配模块对u进行分配后与重构神经网络的输出进行叠加得到各相的控制电流。虚线框内为重构神经网络模型,每个重构神经网络分别计算SRM对应相所需的控制电流,图中为A、B、C三相。转矩偏差ΔT经过PD控制器预处理后输出u作为重构神经网络的误差信号使其进行在线自学习。在控制初期或出现较大误差时,由于转矩环的反馈控制,系统能够保持稳定;重构神经网络模型通过一段时间自学习后得到SRM的转矩—电流模型,系统由反馈控制过渡到重构神经网络控制,主要由重构神经网络模型计算SRM恒转矩下的三相控制电流。
3.1 SRM运行特性曲线
SRM的相电流呈周期性,与转矩、转子位置有关,不同转矩下的相电流波形[14]如图4所示。
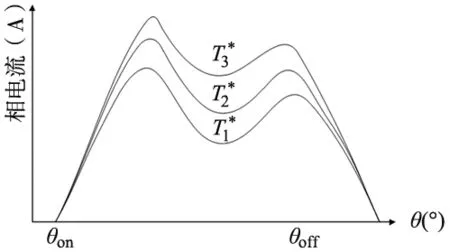
图4 相电流波形

3.2 重构神经网络模型
神经网络的隐含层层数、隐含层节点个数以及隐含层激励函数的选取决定了整个网络的性能。用于逼近SRM转矩-电流模型的重构神经网络采用2-8-1的三层前馈网络结构,如图5所示。
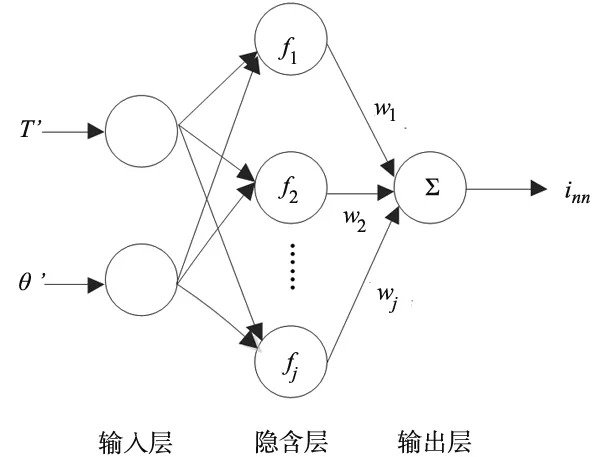
图5 重构神经网络结构
输入层X=[T′,θ′],隐含层激励函数F=[f1,f2,…,fj],隐含层与输出层的连接权值为W=[w1,w2,…,wj],网络输出为inn。隐含层节点数量根据文献[15]提出的优化公式确定:
(7)
式中,ni、nh、no分别为输入层节点数,隐含层节点数和输出层节点数,该文通过试凑取nh=8。
文献[16]提出根据输入信号的先验知识设计的隐元激励函数与sigmoid函数、径向基函数(Radial Basic Function, RBF)等通用激励函数相比,能够简化网络结构并提升网络性能,更有效率地解决问题。受该文启发,重构神经网络根据SRM转矩、转子位置、电流三者的关系以及电流的基本变化规律,即SRM的先验知识设计一种体现SRM特有非线性特性的隐含层激励函数:
(8)
式中,T′为Tref经由函数p与p(Tref)分配模块预处理后的输入,用于调节函数形状;b∈(0,1),决定了函数凹陷的深度,该文取b=0.2;K决定了函数凹陷的宽度,该文取3;c决定了函数的中心,与当前的导通相有关。
根据SRM三相周期性导通规则,该文令c遵循以下约束:

(9)
式中,c的取值应在当前导通相的θon与θoff之间,使激励函数凹陷的位置与当前导通相的电流凹陷处对应,取值范围较宽,该文令c1=10,c2=40,c3=70。
隐元激励函数的设计目的是为了能够描述SRM电流的基本变化规律,只要参数选取使得隐元激励函数fj符合SRM电流的变化规律即可,因此式(8)中的各参数选取较为自由。由于T′和θ′是θ的函数,为进一步论述激励函数与SRM电流基本变化规律的关系,图6绘制了fj与θ之间的映射关系。图中可以看出激励函数与转子位置的映射关系很好地描述了图4中电流与转子位置的关系。当转子转过不同的位置,与导通相对应的重构神经网络计算该相电流的控制量,其余网络则处于“抑制”状态。

图6 激励函数形状
图6中每一相的激励函数形状都与图4的电流波形相似,设计的新激励函数能够描述SRM电流的基本变化规律,神经网络结构与SRM的固有特性更加接近。
神经网络通过反馈误差法[17](Feedback Error Learning, FEL)进行在线学习,选取性能指标函数为:
(10)
式中,u(k)为转矩偏差经过PD控制器处理后的输出。
(11)
式中,η为学习速率,α为动量因子。
重构神经网络的隐元激励函数根据SRM电流变化规律设计,函数模拟了恒转矩下SRM的电流波形,在结构上与研究对象的特性更加相似,无需在参数学习中调节激励函数内的参数,降低了学习难度。
4 仿真验证及分析
在MATLAB/Simulink仿真环境下搭建SRM仿真模型对算法进行验证,SRM模型参数[19]见表1。

表1 SRM主要参数
引入转矩脉动系数[20]作为衡量指标,表达式如下:
(12)
式中,Tmax,Tmin和Tav分别为SRM稳态运行时的最大瞬时转矩,最小瞬时转矩和平均转矩。
4.1 恒定负载仿真测试
设定电机转速为300r/min,负载5N·m。稳态下基于线性电感模型的传统TSF转矩控制策略、基于 RBF 神经网络模型的控制策略和基于重构神经网络模型的控制策略的波形分别如图7~图9所示,各自的转矩脉动系数分别为23.49%、4.87%和1.75%。对比可知,基于线性电感模型的传统TSF转矩控制策略无法准确得到与参考转矩对应的控制电流,转速和转矩都有较大波动。基于 RBF 神经网络模型的控制策略在引入了转矩反馈和神经网络控制后,减小了转矩脉动,速度也能够保持稳定,但是由于激励函数选用一般的RBF,没有针对SRM的运行特性进行设计,准确构建转矩—电流模型的能力有限。基于重构神经网络模型控制策略的激励函数模拟了电流的变化趋势,函数形状能够体现SRM的数学模型,能够描述SRM电流的变化规律,有利于神经网络的学习,能更好地计算恒转矩下SRM的控制电流,抑制转矩脉动。
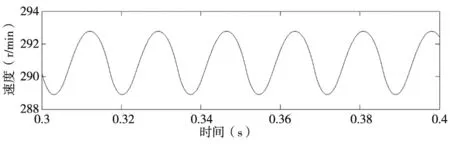
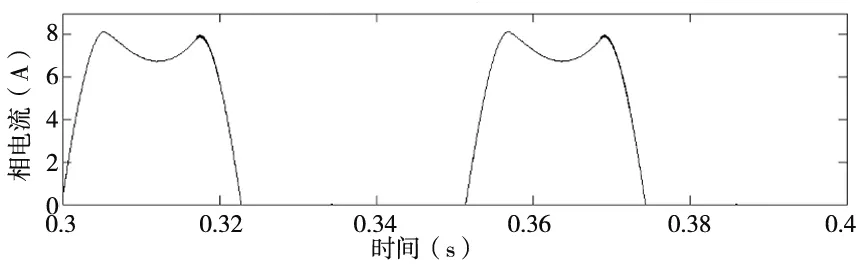
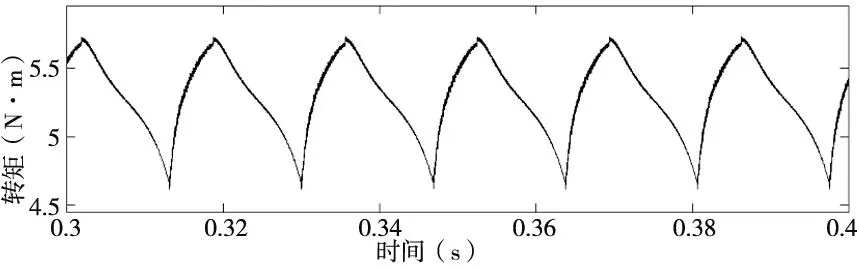
图7 基于线性电感模型的传统TSF控制策略的波形
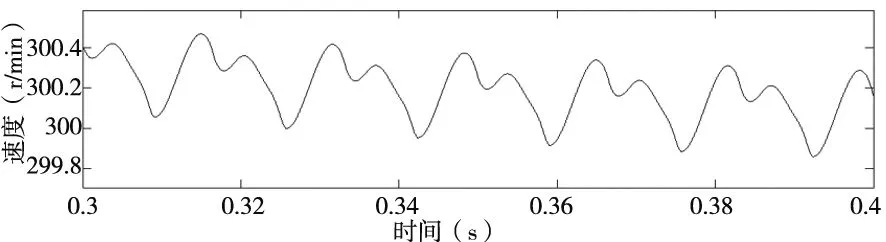

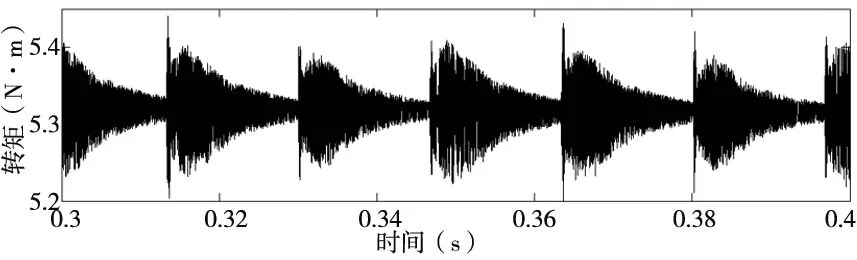
图8 基于RBF神经网络模型控制策略的转矩波形


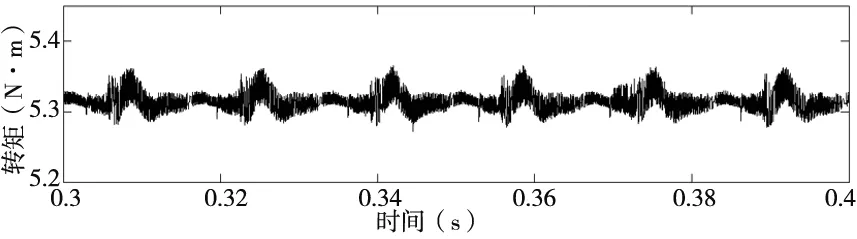
图9 基于重构神经网络模型控制策略的波形
表2和表3列出了不同转速下两种神经网络模型控制策略的转矩脉动系数。

表2 基于RBF神经网络模型的控制策略的转矩脉动系数

表3 基于重构神经网络模型的控制策略的转矩脉动系数
对比可知,重构神经网络模型在不同转速下的控制效果均优于RBF神经网络模型控制,转速为300r/min、500r/min、700r/min时转矩脉动系数分别降低了64.07%、62.33%、65.41%。
4.2 变负载仿真测试
图10和图11分别为基于RBF神经网络模型控制策略和基于重构神经网络模型控制策略的变负载仿真测试,0.2s时负载由3N·m增至5N·m,0.3s时降回至3N·m。由图可知,前者在负载突增和突降时达到稳态的时间为0.05s;后者在负载突增时系统能在0.05s内达到稳定,负载突降时在0.05s内达到稳定,瞬时转矩能够快速跟踪参考转矩,并且转矩脉动系数低于前者,表明所提出的方案能够对负载变化做出快速响应并保持较低的转矩脉动,具有良好的动态响应特性,适用于实际工况。
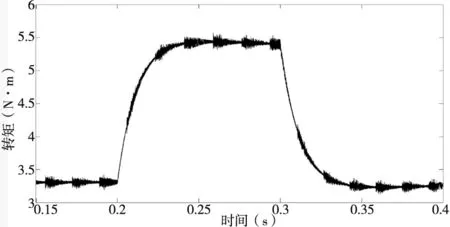
图10 基于RBF神经网络模型控制策略的波形

图11 基于重构神经网络模型控制策略的波形
5 结论
该文依据SRM转矩、转子位置和电流之间的关系设计能够描述SRM电流变化规律的新隐含层激励函数,体现了SRM电流的基本变化规律,重新构建了一种全新的神经网络模型对SRM进行控制。Matlab/Simulink仿真结果表明,在不同转速下,所提出的重构神经网络模型与通用神经网络模型相比,能更准确地计算恒转矩对应的SRM控制电流,抑制SRM的转矩脉动;且在负载突变时具有良好的动态响应,适用于实际工况,验证了该方案的有效性。