基于公理化映射的机床上下料机器人结构设计*
2019-09-18徐开元何玉安蔡智勇
徐开元,何玉安,蔡智勇
(上海第二工业大学 智能制造工程系,上海 201209)
0 引言
数控机床的自动上下料功能对于提高机床生产效率、加工质量,降低生产成本具有重要作用,上下料机器人是实现智能制造的直接体现。桁架式数控机床上下料机器人占地面积小,结构与控制原理简单,结构可靠性高,易于操作,故得到了广泛应用。目前,已有很多研究成果。
王成龙[1]研究了大桁架机械手的技术要求,确定具有二自由度的大桁架机械手作为最优的设计方案。亚晓丹[2]完成了桁架式机床上下料机器人分析与改进设计。朱金权[3]研究一种桁架机器人的结构形式、特点、设备组成与传动系统,获得了系统化的桁架机器人设计方法。边弘晔[4]对机床上下料专用机器人的机械结构进行了受力分析与优化,使机器人的结构性能得到改善。
Ramadian[5]研究了数控铣床高精度装卸机器人的结构建模、仿真与控制问题。Chung H[6]研究了工业机器人柔性制造单元的编程与仿真系统开发的问题,为工业机器人在数控机床上的使用提供了一种方法。Xiong[7]提出了一种利用冗余自由度,将五轴数控机床的轨迹转换为6轴工业机器人运动轨迹的位姿优化方法,设计出一种刚度校核算法,通过仿真,验证了机器人刚度性能的提高。郭斌[8]提出一类薄板零件冲床上下料机械手的物理模型,分析了机械手的负载传递问题。朱福康[9]对悬臂形式的直角坐标机器人,进行刚度强度分析,得到了应力应变更小的优化结果。
已有数控机床装卸机器人研究成果具有良好的应用价值与学术意义,但是系统化的提出机器人机械结构设计流程的研究还不充分。本文基于机器人的技术指标需求,提出一种系统化的机器人机械结构设计方法,并以实例建立了一个三自由度桁架式直角坐标机器人的设计方案,用以完成机床的上下料作业。最后,对机器人的各个部件进行了详细设计。
1 工业机器人设计流程
本文提出一种系统化的工业机器人的设计方法,如图1所示。具体步骤如下:
Step1:确定机器人的技术指标 根据作业任务的性质,确定机器人的运动自由度与作业空间;根据工件的重量,确定机器人的有效载荷。
Step2:机器人功能树建立 根据作业任务,确定目标机器人的功能,并分解出相应的子功能。
Step3:确定机器人的组成结构 利用公理化设计方法,结合机器人的技术指标,将机器人的功能及子功能分别映射出相应的机器人结构部件。

图1 工业机器人机械结构的系统化设计流程
Step4:完成机器人部件的详细设计 首先根据机器人的自由度与运动轨迹的特点,确定机器人的布局形式。其次,完成机器人零部件的详细设计,包括支撑部件、驱动部件、传动部件、执行机构等。最后,完成机器人各零部件 的强度校核。
2 桁架式上下料机器人的结构设计实例
基于第1节的机器人系统化设计流程,针对某类数控卧式机床的上下料机器人进行设计。机器人的设计初衷是满足生产工艺的需要,本文研究的工艺问题是数控卧式机床的自动上下料,其中数控机床是并排放置,成一字形布局。
2.1 机器人技术指标
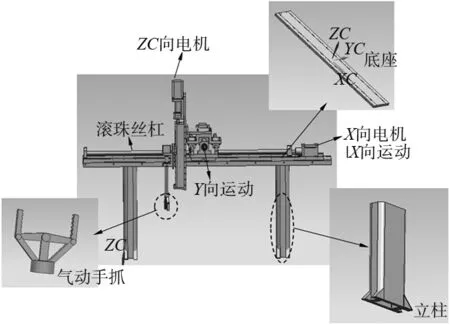
图3 三坐标直角机器人的CAD模型
(1)自由度。3自由度能够较好满足机床上下料的任务需求,所以本文机器人采用3个自由度设计方案,分别是机器人在机床之间沿x轴的移动自由度、机器人的手臂沿y轴的上下移动以及沿z轴的直线移动;
(2)精度。根据行业标准,设定上下料机器人的重复定位精度为0.2mm;
(3)有效载荷。设定机器人的装卸对象为20kg的工件,机器人的有效载荷=工件重量+末端执行器的自重,自重大约为6kg,因此机器人的手部负载为26kg;
(4)作业空间。机器人的作业空间是根据机床在车间中的布局与机床的尺寸来设计的。某车间实例中,并排呈一字型的两台机床,其间距为4000mm,机器人在机床y方向的单向移动距离为1000mm。机床工作台上方垂直空间为350mm,故设定手抓z向垂直抓取距离为500mm。
2.2 机器人的功能树建立
机床上下料机器人的总功能是装卸工件,将总功能逐级分解,建立上下料桁架机器人的功能模型,如图2中的功能域所示。
功能分解的依据是:根据步骤1中机器人的自由度,可以确定机器人具备三个方向的移动功能,同时根据机器人的工作内容,机器人还应具备抓取工件、稳定支撑、与机床通信等功能。
2.3 映射出组成结构
上下料机器人是一种开链式的结构,基于机器人的功能域,按照一一对应原则,映射出机器人的机械结构,如图2的结构域所示,图中箭头代表映射。例如,“移动功能”对应“运动系统”,“X向移动”对应着“X向移动机构”,“X向传动”对应着“X向滚珠丝杠”,“Y向驱动”对应着“Y向驱动电机”,“引导移动”和“支撑机体”分别对应着“导轨结构”、“立柱与底座”。
机器人的运动原理是:X向移动平台载着Y向机械臂沿X轴实现机床间的移动,Y向机械臂带动Z向机械臂沿Y轴移动,Z向机械臂实现机械手抓的Z向垂直抓取移动。

图2 上下料机器人的工艺域—结构域映射模型
2.4 组成部件的详细设计
根据第一节中的Step4的内容,对桁架式上下料工业机器人及其各组成结构进行详细设计。在完成机器人各个部件初步设计的基础上,将各部件组装出上下料机器人的装配模型,如图3所示。本车间实例中,机床呈一字形布局,故机器人的整体框架呈直线形状。
部件的详细设计共包含5个部分,分别是立柱、底座、滚珠丝杠、末端机械手与滚动导轨。除此之外,滚动导轨很适合用于要求移动部件运动平稳、灵敏,以及实现精密定位的场合。
(1)立柱
立柱是矗立在数控机床之间,支撑机器人轨道,使其能够在数控机床上方空间中移动的支撑结构。本文采用截面为矩形,方柱体中空的立柱结构。采用45号钢材,硬度可以达到 HRC55,这种结构节省材料,且刚度强。利用三角形稳定性原理,立柱底端焊接有4个三脚架来支撑,三脚架与地面用地脚螺栓连接。对直角坐标机器人在工作状态时起到一个非常稳固的支撑作用。
(2)底座
底座是固定在立柱顶端,对工业机器人的3个运动起支撑导引作用。机器人的作业空间决定了机器人移动机构的尺寸,底座X向的长度是4000mm,这是根据机器人工作空间来确定的。底座上面有两列孔,用于安装导轨。此外,面上制有螺纹孔,同理用于连接X向运动的电机和轴承座,它是X向运动的关键支撑部分。
(3)X向滚珠丝杠
桁架式机器人横跨在并排的两台数控机床之间,由X向滚珠丝杠作为机器人的传动部件。相比Z、Y向滚珠丝杠,X向滚珠丝杠是传动距离最远、刚度强度要求最高的丝杠。因此,本节将对它的结构进行设计。
根据某工程应用手册中丝杠的精度标准,本文采用C10级精度作为X向滚珠丝杠的精度标准,以保证0.2mm的重复定位精度。
根据X方向的工作空间,设计出行程4000mm的定制滚珠丝杠与丝杠副。该滚珠丝杠的最大驱动力300N,丝杠材料为45号钢,σs=355MPa;梯形螺纹β=15°。
根据电机额定转速和X向的最大速度,计算丝杠导程。X向运动选择松下MDMA152电机,电机最高转速为4000rpm。电机与滚珠丝杆直连,传动比为1。设定X向最大运动速度50mm/s,即3000mm/min。则丝杠最小导程为:
Ph=Vmax/i·nmax=3000/1×4000≈0.75mm/r
(1)
在实例中,取丝杠导程为1mm。通过公式(2),计算滚珠丝杠的中径d2。
(2)
公式(2)中,F为最大驱动力(N),[P]为允许使用的压强数值(MPa);d2为滚珠丝杆的中径数值,单位为mm;当ζ作为梯形螺纹的时候ζ=0.8;可以计算得到d2≥3.46mm。根据标准的梯形螺纹,螺纹的公称直径d=20mm,中径d2=19mm。
(4)末端机械手
机器人的末端执行器是连接操作机腕部的直接用于作业的机构。工业机器人的手腕,有用于连接各种末端执行器的机械接口,按照作业内容的不同机器人选用不同的手抓或工具装在其上,可以完成对应的作业任务,使得机器人具备良好的柔性。
机械手爪夹持力26kg,采用气动驱动方式,其设计模型如图3所示。通过气缸的充放气驱动机械手抓中间连杆的伸缩,从而带动手指的夹紧与松开。
3 结论
本文建立了一套工业机器人机械结构的系统化设计流程,第一步根据机器人的技术指标确定机器人的功能模型,进一步通过公理化映射理论构建出桁架式机床上下料直角坐标机器人的机械结构组成,最后完成关键机械部件的结构设计。所设计机器人能够完成上下料工作任务,具有良好的运动可行性。本文提出的系统化设计方法具有一定的普适性,也适用于其他工作类型的机器人的设计。根据工作需要,确定机器人的技术指标,依据技术指标完成机器人的设计研发,这是我国先进制造水平不断提升的体现,也表明了本文工业机器人设计思想的先进性。