环抛机直驱电机转台系统设计*
2019-09-18金洙吉朱祥龙康仁科李俊卿
马 进,金洙吉,朱祥龙,康仁科,李俊卿
(大连理工大学 精密与特种加工教育部重点实验室,辽宁 大连 116024)
0 引言
环形抛光机是实现光电子基片化学机械抛光的重要设备。环形抛光过程实质上是工件与抛光盘对研的过程,所以抛光盘的运动精度将直接影响工件的加工效果。目前环抛机主要使用高速伺服电机带动齿轮副等传动机构进行数控转台的驱动[1],但由于大型环形抛光机抛光盘总重可达1t,伺服电机负载极大,此结构会产生数控转台轴向跳动和振动问题,增大了系统响应时间,影响加工效果。
近年来,随着电机技术的不断发展,以直驱电机直接带动相关机构实现主轴运动的机械结构越来越多。直驱电机可在低转速的条件下提供大扭矩,避免复杂机械传动装置带来的轴向跳动与振动问题,具有较为广阔的应用前景。本文提出了应用于环抛机的直驱电机转台控制系统,在LabVIEW环境下基于工控机和运动控制卡控制,使用电流环、速度环和位置环形成三闭环控制系统实现直驱电机转台的低速平稳旋转。系统响应速度快,速度波动范围小。
1 系统整体结构
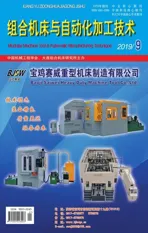
环抛机直驱电机转台系统机械结构图如图1所示,系统主要由直驱电机、液体静压转台、转轴、理石工作台和抛光盘组成。电机座固定在理石工作台上,直驱电机定子部分固定在电机座上,转子部分连接液压转台转子部分实现主轴的旋转运动。系统选用Kollmorgen的KBM无框直驱电机,最大连续静止转矩达672Nm;选用hyprostatik的静压转台,最大转速为120rpm。
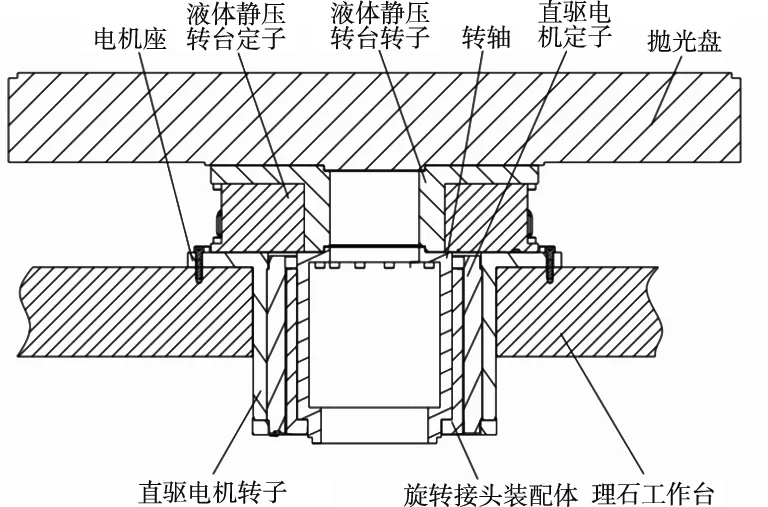
图1 环抛机直驱电机转台机械结构图
环抛机直驱电机转台系统基于研华运动控制卡搭建,整体框架图如图2所示。系统主要由主电源、工业控制计算机、运动控制卡、伺服驱动器、主轴直驱电机、液压工作站、圆光栅和数据采集卡组成。上位机向下位机输出“脉冲-方向”信号,由下位机控制直驱电机带动液压转台实现低速平稳旋转,直驱电机反馈信号由伺服驱动器A±、B±和零位±接口传入至伺服驱动器中实现位置环反馈。液压转台由液压工作站供给液压油,液位及报警信号由数据采集卡采集并反馈至上位机中,实现液压转台的安全监控。
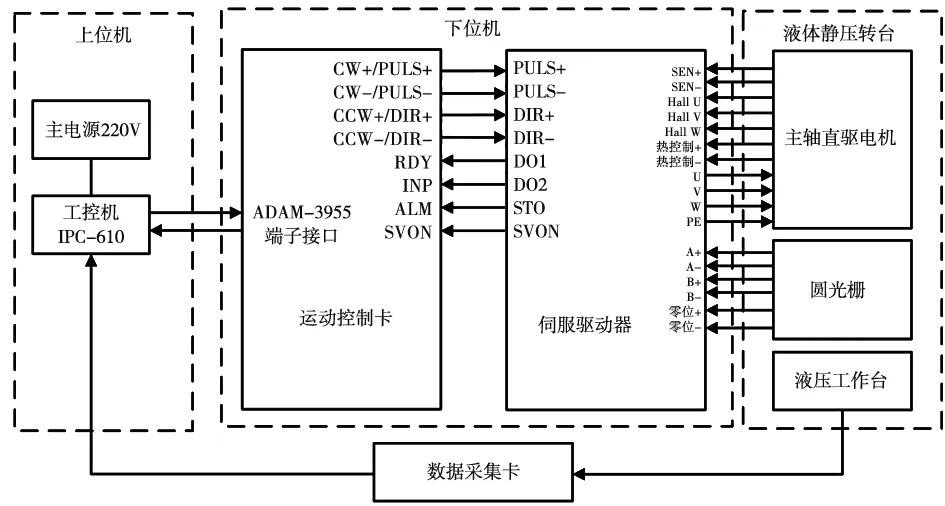
图2 环抛机直驱电机转台控制系统整体框架图
2 控制系统设计
2.1 软件设计

图4 环抛机直驱电机转台控制系统三闭环控制示意图
环抛机直驱电机转台系统控制软件是在LabVIEW环境下基于研华API通用运动架构(API,Application Programming Interface,应用程序编程接口)和LabVIEW子VI编写的。LabVIEW是美国国家仪器公司研发的一个基于图形编程语言(G语言)的开发环境,提供了其他语言环境具备的经典信号处理函数和自主研制的现代高级信号分析工具[2]。研华API通用运动架构是研华为统一所有运动设备的用户接口搭建的编程平台,对具有的运动功能和用户接口作了全方位定义,使用户能以相同方式操作设备。研华API通用运动架构示意图如图3所示,整个运动架构由应用层、整合层和设备驱动层构成,在LabVIEW环境下,设备驱动层中实现特定功能的所有API函数都可从整合层中的接口函数库ADVMOT.ALL中获取,接口函数库再调用特定PCI数据卡的动态链接库所需的头文件,从而在应用层中实现相关功能。
图3 研华API通用运动架构示意图
控制系统的软件控制流程为:开启设备→开启该设备的特定轴→配置该轴实例→开始运动→完成运动后关闭特定轴→关闭设备。通过调用API函数U32 Acm_DevOpen 和U32 Acm_AxSetSvOn 分别完成运动控制卡和伺服驱动器的初始化,配置LabVIEW的数据采集平台DAQNavi Assistant 的数据采集端口实现数据采集卡的初始化和液压工作站等其他辅助设备的开启及关闭。在运动过程中,伺服驱动器计算电流环和速度环增益并进行快速调速控制,完成运动后通过调用API函数U32 Acm_DevClose关闭轴和其他设备。
2.2 直驱电机控制系统设计
无框直驱电机本质上是永磁同步电机(Permanent Magnet Synchronous Motor,PMSM),其数学模型可简化为一组变系数微分方程[3]。本文的环抛机直驱电机转台控制系统采用矢量控制技术中的三闭环控制策略,总体控制示意图如图4所示。系统从内至外分别为电流环、速度环和位置环,电流环的输出信号输入给速度环,速度环的输出信号输入给位置环。电流环的主要作用是保证电流跟踪性能并抑制内部干扰,速度环的主要作用是加强系统抗负载扰动的性能,位置环的主要作用是确保系统位置的动静态追踪能力[4]。按照三环控制系统“先内环后外环”的控制原则,依次设计电流环、速度环和位置环,可提高控制系统的稳定性[5]。本文采用的直驱电机相关参数如表1所示。
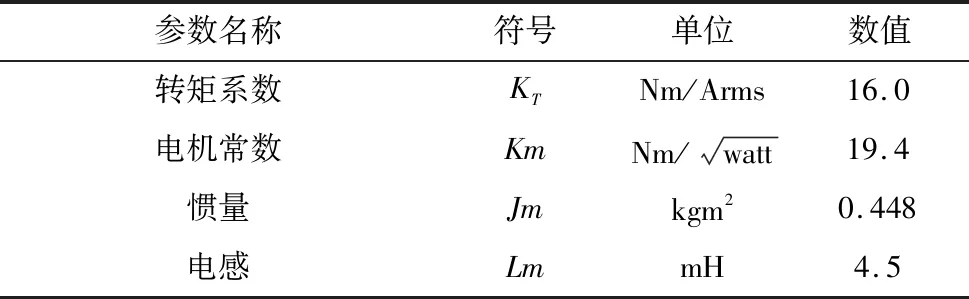
表1 直驱电机相关参数表

续表
2.2.1 电流环控制系统设计


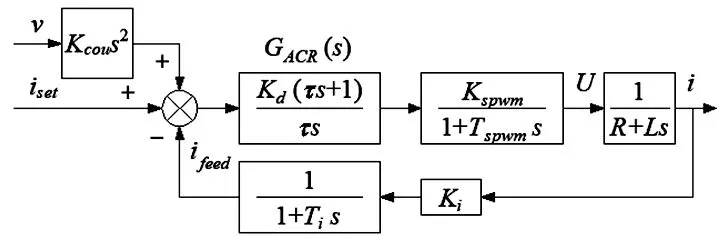
图5 环抛机直驱电机转台控制系统电流环
2.2.2 速度环控制系统设计
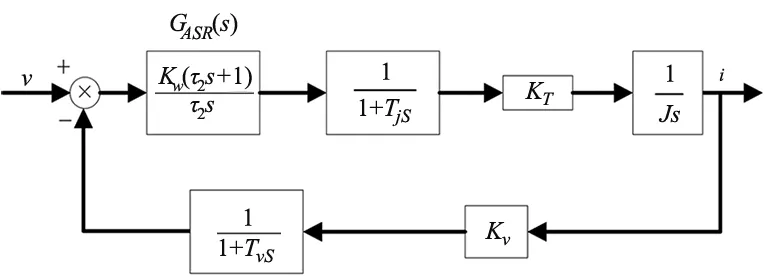
图6 环抛机直驱电机转台控制系统速度环
2.2.3 位置环控制系统设计

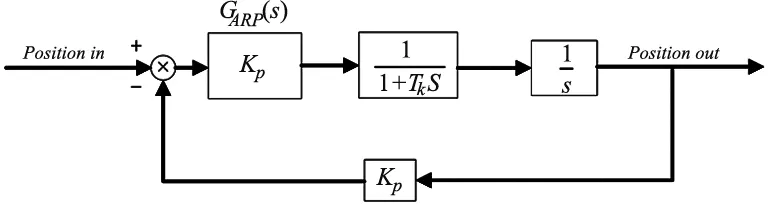
图7 环抛机直驱电机转台控制系统位置环
3 仿真验证
根据上述相关理论参数,使用Matlab中的simulink工具箱进行三环控制系统仿真,结果如图8~图10所示,仿真部分参数如表2所示。由仿真结果可知,电流环不存在超调情况,调节时间为0.28s,可使系统快速响应;速度环有22.35%的超调量,但调节时间为1.22s,速度波动量为0.876%,可见速度环有较大抗干扰能力,在系统稳定运行的过程中速度波动量小于1%,满足实际加工要求;位置环是三环控制系统的最外环,超调量仅为1.261%,调节时间为2.52s,可较大程度上减小位置环的稳态误差,保持三环控制系统的稳定运行。

图8 电流环阶跃响应曲线
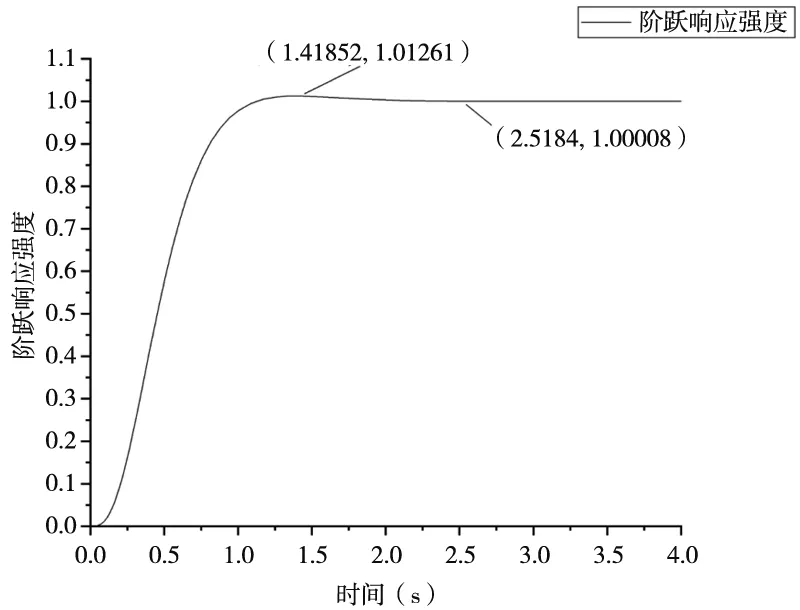
图9 速度环阶跃响应曲线
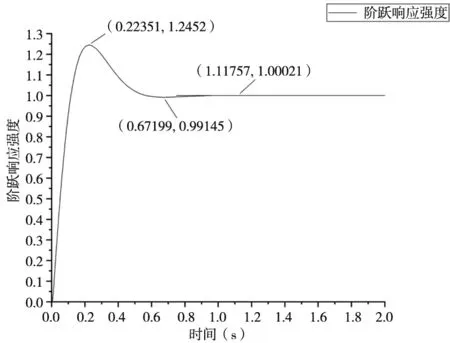
图10 位置环阶跃响应曲线

项目超调量/%调节时间/s波动量/%电流环00.280.087速度环22.351.120.876位置环1.2612.520.008
4 结论
本文针对光电子基片超精密抛光加工对环形抛光机提出的抛光盘低速稳定运转要求,设计了环抛机直驱电机转台系统。硬件上采用无框直驱电机直接驱动液体静压转台旋转、圆光栅反馈转速、运动控制卡进行闭环控制的设计方案,软件上基于LabVIEW程序环境和研华API通用运动架构设计人机交互系统,按照三环由内而外的控制系统设计思想逐步设计电流环-速度环-位置环三环控制系统并推导各环传递函数模型。使用Matlab仿真软件中的Simulink工具箱对所设计的三环控制系统进行仿真,结果表明,控制系统电流环调节时间为0.28s,具备快速响应的特性;速度环的速度波动量为0.876%,可较好满足抛光盘低速稳定运转的实际加工要求;位置环超调量为0.63%,可保证环抛机直驱电机转台控制系统的稳定运行,为电子基片的超精密抛光加工提供有力条件。