基于SeaWiFS对月观测数据的月球辐照度模型分析*
2019-09-18曾祥钊唐伶俐
曾祥钊,唐伶俐
(1 中国科学院光电研究院 中国科学院定量遥感信息技术重点实验室, 北京 100094; 2 中国科学院大学,北京 100049)
自从20世纪70年代第一颗陆地卫星成功发射以来,国外空间大国一直致力于在轨辐射定标的研究,发展了星上定标、场地替代定标、交叉定标等方法,形成以星上定标为主,多种定标手段交叉使用的发展态势。然而,星上定标器容易受到太空污染及电子器件退化等问题的干扰而导致性能衰退;场地替代定标受尺度效应和大气干扰的影响,定标精度受限[1-2];交叉定标受参考卫星定标精度的影响,并且对观测条件要求苛刻,多作为验证手段[2]。
月球作为宇宙中长期稳定存在的自然天体,没有大气和液体的流动侵蚀,其表面稳定性非常高,用它来做定标源有望避免复杂的大气干扰,因此21世纪初,国际上出现新的星上定标手段——月球定标,并引起国际空间研究机构的广泛关注。为满足可见光遥感载荷在轨辐射定标需求,需准确获取月球反射特性,但由于月球表面的反射率无法直接测量,因而需要基于地基或天基对月观测数据构建太阳反射谱段的月球辐射模型,且模型的精度直接决定着月球定标的精度。目前,国际上已建立以ROLO[3]和MT2009[4]为代表的月球辐照度模型,并应用于传感器在轨辐射特性的长期监视。为进一步提高月球定标的精度,全球空基交叉定标系统(global space-based inter-calibration system, GSICS)和全球对地观测委员会(Committee on Earth Observation Satellites, CEOS)下属的红外与可见光传感器专业技术组(Infrared Visible and Optical Sensors, IVOS)联合成立月球定标工作组,旨在通过成员间共享月球影像数据(GSICS lunar observation dataset, GLOD),在ROLO模型的基础上,构建更精准的月球辐照度模型(GSICS implementation of the ROLO model, GIRO)作为月球定标的参考标准[5]。国家卫星气象中心开展地基对月观测以验证ROLO月球辐照度模型,并基于地基对月观测数据对ROLO和MT2009月球辐照度模型进行比较和分析[6]。然而由于地基观测受大气干扰,大气纠正误差会直接影响测量数据的精准性。因此,本文基于SeaWiFS天基对月观测数据对ROLO和MT2009月球辐照度模型进行分析和验证,为进一步优化月球辐照度模型提供借鉴。
1 月球辐照度的影响因子
构建月球辐照度模型需要考虑多种因素的影响,由于观测几何决定实际观测到的月面,月表反射率分布和月表地形起伏(统称月表非均匀性)决定月面反射特性,因此对月观测几何和月表非均匀性是影响月球辐照度的主要因素。其中,对月观测几何包括月球相角、太阳入射方向和卫星观测方向;月表非均匀性受月壤的矿物成分、物理结构以及月表地形的影响。令月表面元C的二项反射率分布函数为r(θi,φi;θr,φr),其中(θi,φi)和(θr,φr)分别为面元C的入射方向和反射方向的球面坐标表示。令太阳光照射到月表时的辐照度为F,对于面元C,其接收到的辐照度为Fcosθi。对位于(θr,φr)方向的观察者,面元C反射的辐照度为r(θi,φi;θr,φr)FcosθidS/d2,其中d为地月平均距离。假设黄道平面和白道平面共面,地球绕太阳、月球绕地球公转的轨道偏心率为0,不考虑月面的地形起伏,观测几何如图1所示。
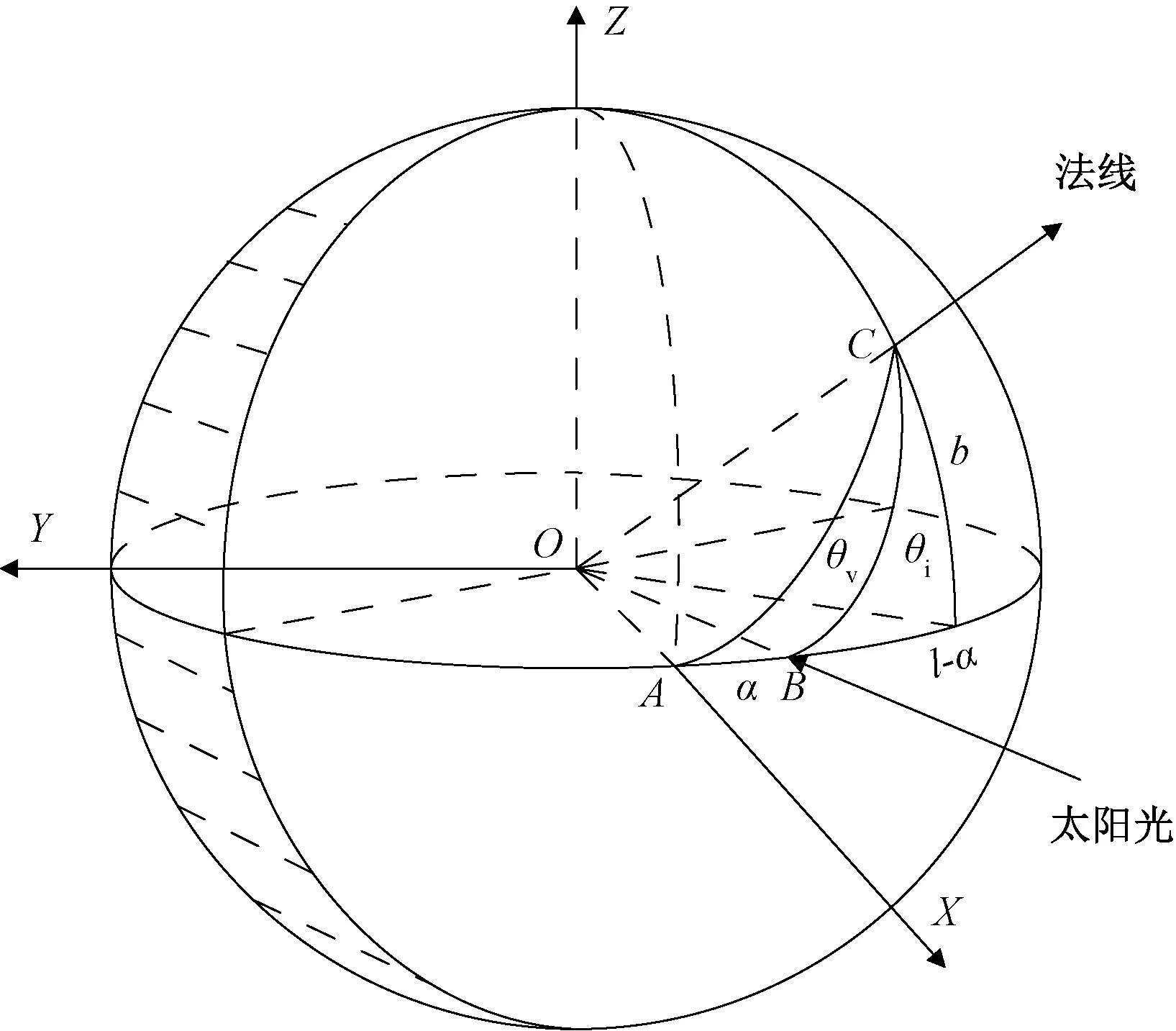
图1 对月观测几何Fig.1 Observation geometry
(1)
式中:R为月球半径。令r(θi,φi;θr,φr)为常数γ,剔除阴影面后计算辐照度,并对辐照度归一化,得到不同月相下描述月球辐照度变化率的月相函数,如下
(2)
(3)
其中式(2)对应α>0,即月亏阶段;式(3)对应α<0,即月盈阶段。由式(2)和式(3),可以绘制出理想条件下归一化辐照度随月球相角的变化,如图2所示。
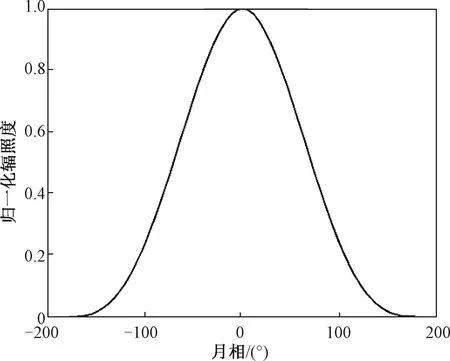
图2 理想月面的月相函数Fig.2 Lunar phase function under ideal condition
由图2可知,在上述理想条件下,月相函数在月盈和月亏阶段是完全对称的,并且仅与月球相角相关。在不同月相下模拟理想的月球圆盘,模拟结果如图3所示。第1行月球影像对应月盈阶段,月球相角由左向右分别为0°、-45°、-90°和-135°;第2行月球影像对应月亏阶段,月球相角由左向右分别为0°、45°、90°和135°。由图3可知,随着月球相角绝对值的增加,月球的阴影面积逐渐增加,辐照度逐渐降低。
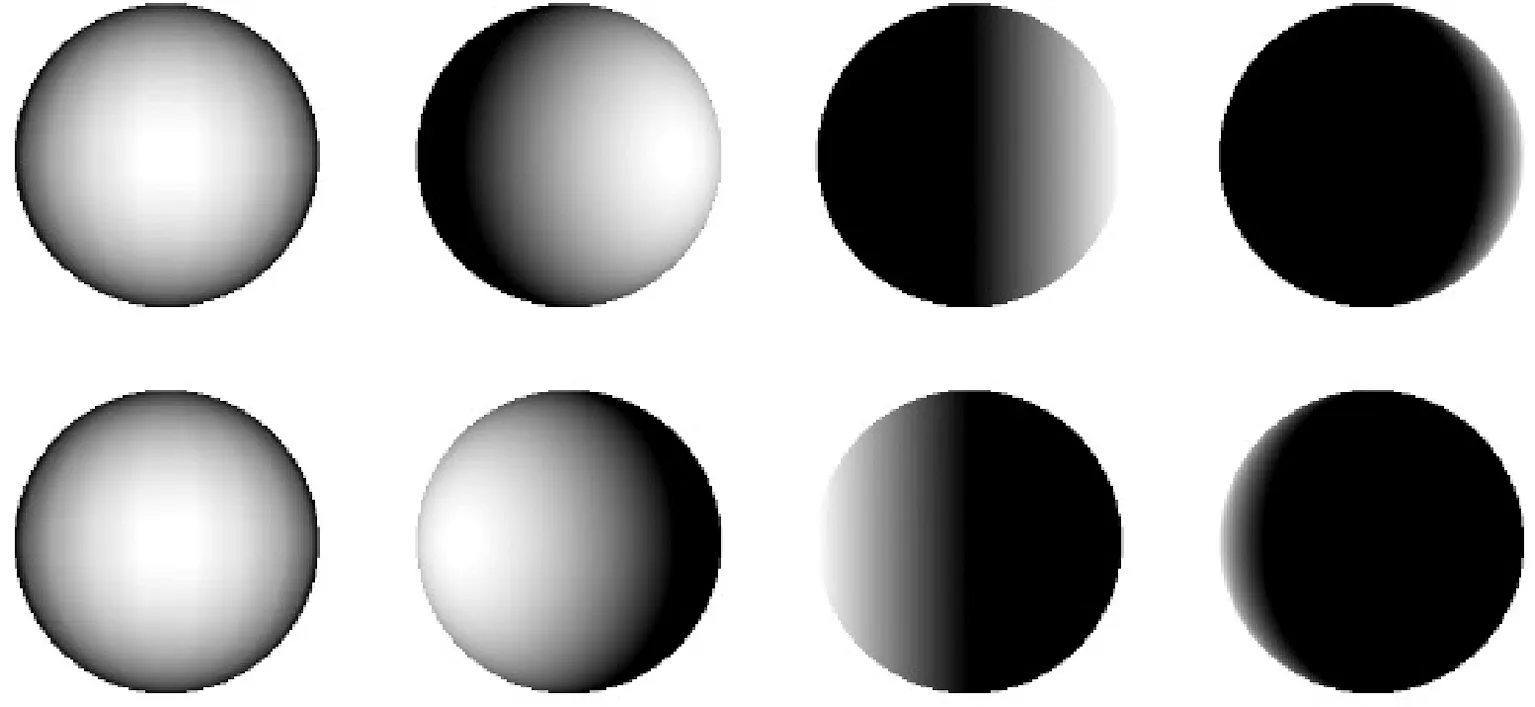
图3 理想月面随月球相角的变化Fig.3 Lunar surface change with the lunar phase angle under ideal condition
然而,上述推导做了很多简化。首先,由于月壤矿物成分和物理结构的不同,不同区域的反射率也不同。用双向反射率(r)模型描述月面上任意一个面元Ci的反射特性,设Ci的双向反射率为rCi。按照反射率性质可以对月表进行分类,分类结果可表示为{LS1,LS2, …,LSi,…,LSn},令每一类的双向反射率为ri,因此属于LSi类的月表面元可以如下表示
{Ci∈LSi|min(|rCi-ri|)}.
(4)
仍然假设月表的反射特性服从朗伯反射,将式(4)得到的分类结果代入式(1)可知,辐照度不仅与月球相角相关,还与入射方向和观测方向相关。其次,月面存在高低不平的地形起伏,面元的法向量并不是面元到球心的连线,改变式(1)中的θi和θr,对最终积分的结果产生影响。并且,由于地形间的相互遮挡和光波的干涉效应,当太阳入射方向和卫星观测方向的夹角小于5°时辐照度会出现明显的非线性陡增,将此现象称作反冲效应[4]。最后,虽然从直观的视觉效果上,在地球上看到的月面是相同的,然而实际上月球并不是始终以相同的月面朝向地球,会在经度方向有±7.75°的偏移,纬度方向有±6.68°的偏移,使不同月相周期内相同月球相角下观测到的月球辐照度值存在细微的差异。因此,考虑月面反射率分布和月表地形起伏后,月球辐照度与太阳入射方向、观测方向和月球相角这3个变量相关。
2 SeaWiFS天基对月观测数据处理
SeaWiFS传感器是SeaStar卫星上唯一的载荷,它于1997年9月18日开始在轨运行,2010年11月11日停止数据收集任务,服役长达13年。其轨道高度为705 km,轨道倾角为98.2°,是太阳同步轨道卫星。SeaWiFS传感器是专为进行海洋光学遥感而发射的,适合暗目标的观测。其定标稳定性好(< 0.13%),定标精度高(1%~2%)[7]。在13年服役期间,SeaWiFS传感器在7°、27°以及40°~55°高相角附近对月球进行成像,月球相角覆盖范围广,因此选择SeaWiFS对月观测数据对现有月球辐照度模型进行分析。由于SeaWiFS对月观测数据的处理需要考虑观测距离和过采样效应等因素的影响,这些影响因子与对月观测几何密切相关,因此本节首先介绍对月观测几何的计算。
2.1 对月观测几何的计算
论文参考DE421星历表,获得月球、太阳在地球J2000.0坐标系下的坐标值,进而计算卫星的对月观测几何。DE421星历表是由美国喷气推进实验室(Jet Propulsion Laboratory, JPL)发布用以描述太阳系主要天体位置、速度、加速度的模型,给出1600—2200年太阳、大行星和月亮的位置速度,以及地球章动和月球天平动的数据[8]。根据观测时间由DE421星历表得出月球和太阳在地球J2000.0坐标系下的坐标值。由此坐标值可以计算出地月向量和日月向量,进而得出地月距离、日月距离、月球相角、太阳入射方向和卫星观测方向,部分计算结果如表1所示。
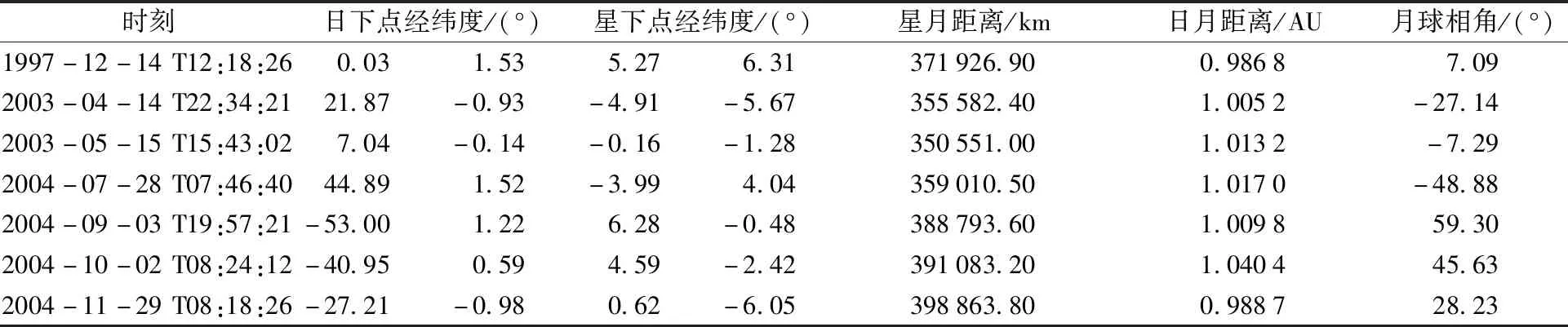
表1 SeaWiFS对月观测几何计算结果Table 1 Partial results of SeaWiFS lunar observations
2.2 SeaWiFS月球影像辐照度提取
在提取月球辐照度时,以每条扫描线为单位,设定最大辐亮度的5%为阈值,所有高于此阈值的像素点都为月球,采用下式计算月球辐照度:
(5)
式中:Ω为单个像素点对应的立体角,Li为单个像素点对应的辐亮度,I为月球辐照度。
由于辐照度与观测距离相关,利用式(6)和式(7)对月球辐照度进行日-月-地距离修正,将观测得到的月球辐照度修正到标准距离上[9]:
(6)
(7)
式中:DS-M和DV-M分别为日地距离和星月距离;Dnorm为地月平均距离,为384 400 km;1AU为地日平均距离,为149 600 000 km;Ik为距离纠正后的辐照度。
此外,由于卫星的扫描速度低于SeaWiFS传感器的采样速度,导致SeaWiFS月球影像会在垂直方向上出现拉伸现象,即过采样效应,从而使得提取的月球辐照度高于实际值。本文采用式(8)计算过采样纠正系数以对提取的辐照度值进行过采样纠正[10]:
(8)
式中:Ynorm为平均星月距离上对应的月球影像在行方向的尺寸;Yelon是实际的月球影像在行方向的尺寸,经过采样纠正后的月球辐照度I′如下
(9)
2.3 月相函数
由于SeaWiFS对月观测数据的月相角分布范围广,本文采用多项式对SeaWiFS对月观测数据进行拟合。其中,月亏阶段采用4阶多项式建模,月盈阶段采用3阶多项式建模,分别如下所示:
lwaning=p5x5+p4x4+p3x3+p2x2+p1,
(10)
lwaxing=p4x4+p3x3+p2x2+p1.
(11)
式中:x代表月球相角,lwaning为月亏阶段的归一化辐照度,lwaxing为月盈阶段的归一化辐照度,p1、p2、p3、p4和p5为拟合系数(见表2)。

表2 由SeaWiFS对月观测数据获取的月相函数Table 2 The lunar phase function derived from the SeaWiFS data
以SeaWiFS传感器865 nm波段为例,对月盈、月亏及理想月面的月相函数进行比较,结果如图4所示。

图4 月相函数对比Fig.4 Comparison among lunar phase functions
由图4可看出,基于SeaWiFS对月观测数据构建的月相函数在月盈阶段的辐照度高于月亏阶段,这个趋势也可以在另外7个波段上观察到,这与8个波段下的月表非均匀性相关;此外,与基于SeaWiFS对月观测实测数据构建的月相函数相比,理想月面的归一化辐照度明显更高,曲线的斜率变化也更平缓,在20°月相角时辐照度为峰值时(0°月相角)的95%,在50°月相角时仅下降到峰值时辐照度的70%。而基于SeaWiFS对月观测数据构建的月相函数随着月球相角的增加,其归一化辐照度下降速度更快,在20°月相角时辐照度就已经下降到峰值时的48%,当达到50°月相角时,辐照度为峰值时的30%,说明月球辐照度随月球相角变化明显,并且月相角在0°~20°时尤为明显。由于当月相角为180°时,太阳光照射到月球的背面,此时月球辐照度为0,因此,在50°月相角变化到180°时,月球辐照度仅下降30%。
3 月球辐照度模型分析
月球辐照度模型以不同的对月观测几何为输入,模拟出不同波段的月球辐照度或反照率。目前月球辐照度模型的构建思路都是以大量的实测数据拟合经验解析函数,例如ROLO和MT2009月球辐照度模型。
3.1 ROLO模型
美国地质调查局的Kieffer和Stone[3]利用地基自动月球观测台在1997—2003年期间进行地基月球观测,获得构建月球辐照度模型长时间序列对月观测数据,并在综合考虑月相、地形分布、反冲效应和天平动4个影响因子的基础上,利用地基对月观测数据对解析模型进行3次拟合,提出月球反照率的解析表达式,即ROLO模型:
(12)
式中:g代表月球相角,θ和φ分别代表观察者在月球坐标系下的纬度和经度,Φ代表太阳在月球坐标系下的经度;ai多项式代表月球有效反照率随月球相角变化的函数,bi多项式代表月表不同地形反射特性的校正项,ci多项式代表考虑天平动影响实际观测的月表,di多项式代表在5°相角内陡增的反冲效应,最后一项三角函数项代表与月表地形分布相关的拟合残差。
ROLO模型32个波段的平均拟合残差低于1%,绝对不确定度约为5%~10%,波段范围为0.35~2.45 μm[3]。利用ROLO模型计算得到月球辐照度公式
(13)
式中:ΩM为月球的立体角,Ek为波段k的太阳辐照度,Ik为波段k的月亮辐照度。
ROLO月球辐照度模型是目前影响因子考虑最全面的模型,因此本文利用ROLO模型分别对月球相角、地形分布、反冲效应和天平动对辐照度的影响进行敏感性分析,模拟2000年1月1日至2000年12月31日的对月观测几何,并利用式(12)和式(13)计算月球相角、地形分布、反冲效应和天平动对ROLO模型32个波段下模拟的月球辐照度的影响,分析结果如表3所示。
由表3可知,月球相角对辐照度的影响最大,为57.91%~72.09%,地形分布、反冲效应和天平动对辐照度的影响依次降低,分别为2.13%~6.22%、1.53%~4.70%和0.76%~0.78%。在第2节中介绍过,理想情况下,月球辐照度仅与月球相角相关,由表3可知,月表地形分布是提高月球辐照度模型精度的关键。由于月球的反冲效应在5°月球相角下出现[4],因此对辐照度的影响有限。由表3可知,辐照度对反冲效应的敏感性与波长没有关系,说明ROLO模型只考虑了阴影遮挡引起的反冲效应,对相干背向散射导致的反冲效应并没有考虑,这与Buratti等[11]对反冲效应的解释一致。天平动对辐照度的影响很小,仅为0.76%~0.78%,因此可以考虑将地形分布和天平动这两个影响因子合并,统称为与月表非均匀性相关的影响因子。利用ROLO模型模拟SeaWiFS传感器对月观测辐照度,如图5所示。
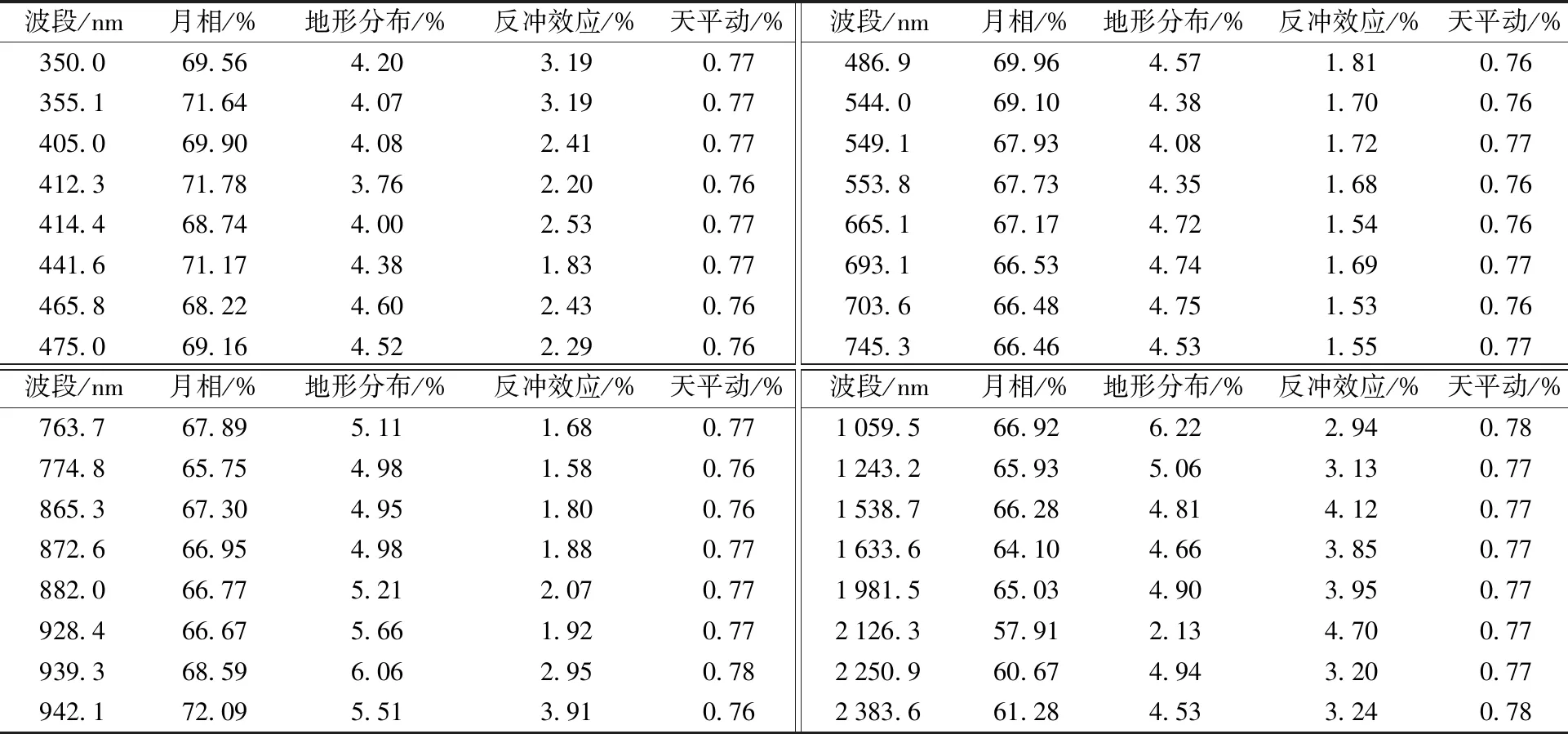
表3 ROLO模型的敏感性分析Table 3 Sensitive analysis of ROLO model

图5 ROLO模型月球辐照度模拟值Fig.5 Lunar irradiance simulated using ROLO
将模拟值与本文提取的SeaWiFS月球辐照度观测值进行比较,分别计算得到SeaWiFS传感器8个波段上所有月相条件下二者的相对偏差和方差,如表4所示。从表中可以看出ROLO模型在可见光和近红外谱段与SeaWiFS对月观测辐照度实测值的相对偏差在(-1.16%±2.94%)~(10.44%±3.71%)之间。由相对偏差和方差计算结果可知,ROLO模型在412、443和865 nm这3个波段下与SeaWiFS对月观测数据的一致性最好,而在510、555和765 nm这3个波段与SeaWiFS对月观测数据的一致性较差。

表4 ROLO模型同SeaWiFS月球数据的比较Table 4 Comparison between ROLO and SeaWiFS lunar observations
3.2 MT2009模型
为了利用可见光红外成像辐射仪(visible infrared imaging radiometer,VIIRS)传感器的昼夜波段(day/night band,DNB)开展夜间遥感应用,美国大气合作研究所的Miller和美国科学应用国际公司的Turner于2009年提出一种半经验高光谱月球辐照度模型(MT2009)[4],其波段范围在0.20~2.80 μm。MT2009月球辐照度模型参考过去数十年天文学家及宇航员测量的对月观测数据,构建了月球反照率的经验模型,如下
(14)
式中:A0(λ)为不同波长λ下的几何反照率,表示月球相角为0°时实际月球圆盘反射的辐照度与相同观测几何下朗伯特性的月球圆盘反射的辐照度的比值,它是基于多种数据源[12-14]得到的一个经验表达式;ci为经验系数。
将太阳辐射作为入射辐照度,对其进行距离修正,利用月球反照率模型,计算出月球的出射辐照度
(15)
式中:Ωm代表在地月距离为Rme时全月面圆盘对应的立体角;Lm代表月球反射的辐亮度;E0为太阳常数;Rsm为日月距离,代表地日平均距离;rm为月球圆盘半径;rd为地球平均半径。f(θp,λ)为月相函数,其经验表达式为
f(θp,λ)=10-0.4[a(θp)-b(θp)λ].
(16)
式中:波长λ的单位为μm;a和b为月球亮度随波长和相角变化的拟合系数,由实测数据获得[15]。
MT2009模型只考虑了观测相角对辐照度的影响,没有考虑月表地形起伏和天平动的影响,导致其在月盈和月亏阶段的辐照度相角曲线是对称的,与实际情况不符。另外,由于对反冲效应的解释存在争议,MT2009模型没有考虑反冲效应的影响[4]。利用MT2009模型模拟SeaWiFS传感器对月观测辐照度,如图6所示。
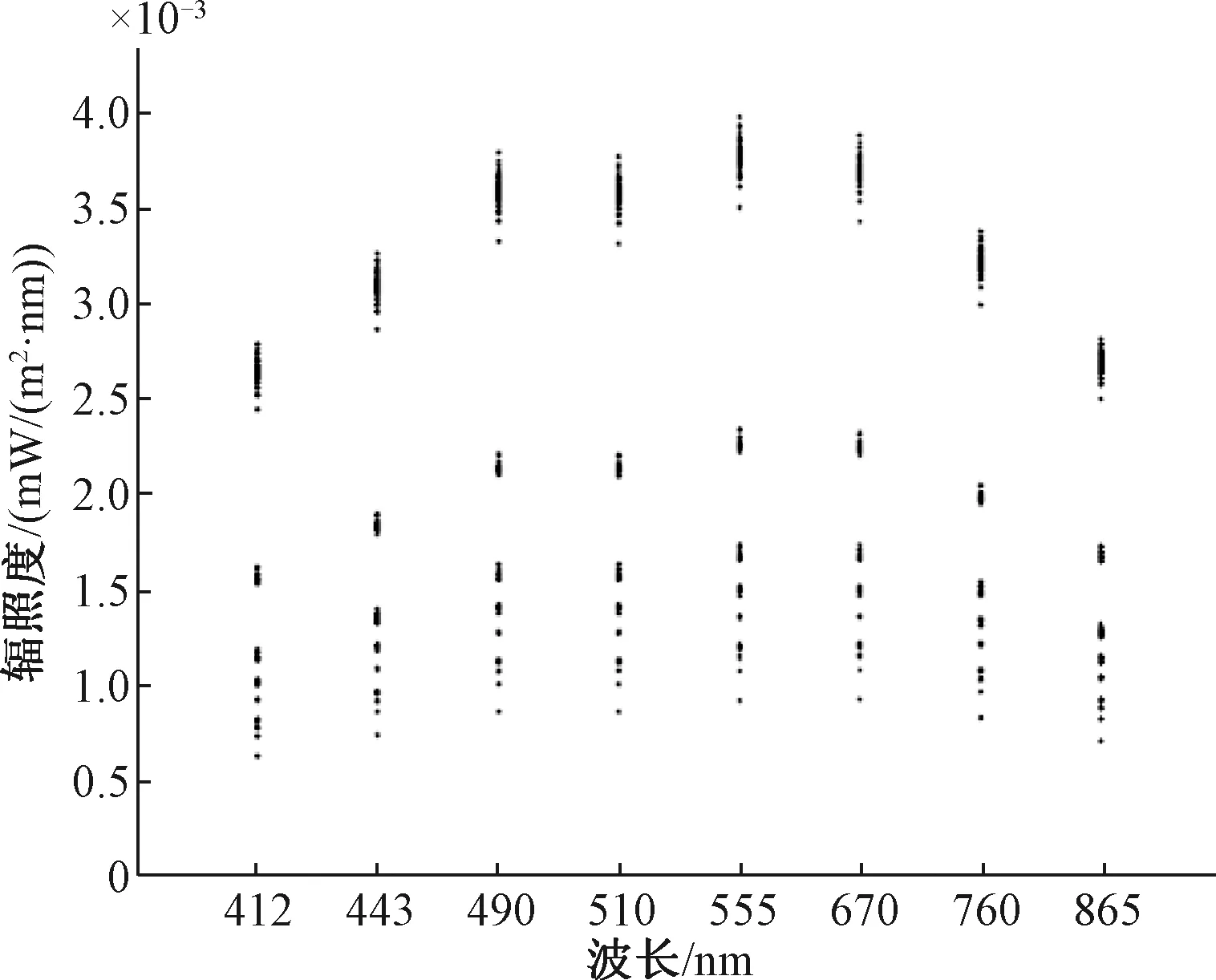
图6 MT2009模型月球辐照度模拟值Fig.6 Lunar irradiance simulated using MT2009
将模拟值与本文提取的SeaWiFS月球辐照度观测值进行比较,分别计算得到SeaWiFS传感器8个波段上所有月相条件下二者的相对偏差和方差,如表5所示。

表5 MT2009模型同SeaWiFS月球数据的比较Table 5 Comparison between MT2009 and SeaWiFS lunar observations
由表5可以看出MT2009模型在可见光和近红外谱段同SeaWiFS对月观测辐照度的平均相对偏差在(-1.94%±2.64%)~(9.83%±3.37%)之间。由相对偏差和方差计算结果可知,MT2009模型在412、443和865 nm这3个波段下与SeaWiFS对月观测数据的一致性最好,而在555、670和765 nm这3个波段与SeaWiFS对月观测数据的一致性较差。与表4相比,MT2009月球辐照度模型同SeaWiFS月球辐照度实测值的相对偏差略小于ROLO模型。
4 结论
本文以月球定标这一新的定标手段为目标,对月球辐照度的影响因子和现有的月球辐照度模型进行分析,以期为今后月球辐照度模型的优化提供借鉴。在理想条件下分析辐照度随月球相角的变化,结果显示月盈和月亏阶段的月相函数是完全对称的,并且辐照度仅受月球相角影响。而基于SeaWiFS传感器8个波段对月观测数据构建的月相函数表明月盈阶段的辐照度总是大于月亏阶段,这与8个波段下的月表非均匀性相关。另外,基于SeaWiFS对月观测数据的月相函数随月球相角变化明显,在0°~20°月球相角下,辐照度下降到峰值时的48%,而相同相角范围内,理想情况下以朗伯体建模的月表辐照度仅下降到峰值时的95%,说明构建月相函数时需要选择一阶导数较大的解析式。ROLO模型的敏感性分析结果显示月球相角是影响月球辐照度的主要因素,月球辐照度对月球相角的敏感性在57.91%%~72.09%;其次是月表地形分布,它是提高月球辐照度模型精度的关键,月球辐照度对地形分布的敏感性在2.13%~6.22%;天平动对月球辐照度的影响很小,月球辐照度对天平动的敏感性在0.76%~0.78%,因此可以考虑将月表地形分布和天平动合并,统称为与月表非均匀性相关的影响因子。SeaWiFS传感器的对月观测辐照度同ROLO模型的相对偏差在(-1.16%±2.94%)~(10.44%±3.71%)之间,同MT2009模型的相对偏差在(-1.94%±2.64%)~(9.83%±3.37%)之间,比较结果显示两种模型的性能差异不大。由于两种模型都采用地基观测数据源作为模型构建的依据,因此大气影响是模型主要不确定性的来源,今后可以考虑采用天基对月观测数据优化现有月球辐照度模型。
感谢马灵玲老师、高彩霞老师和邱实老师对本文的指导,感谢Gene Eplee提供SeaWiFS对月观测数据并对SeaWiFS数据的处理工作给予有效的指导,感谢Steven Miller提供MT2009模型。