前后轴独立驱动的增程式电动汽车整车控制策略
2019-09-17宋真玉
宋真玉,史 戈
(1.陕西工业职业技术学院汽车工程学院, 陕西 咸阳 712000; 2.西安电力高等专科学校, 陕西 西安 710032)
增程式电动汽车相比纯电动汽车,不仅降低了动力电池的成本,而且增大了续驶里程[1]。国内外汽车市场上的增程式电动汽车以单电机驱动为主,但汽车整备质量的增大会导致整车需求功率增大,使驱动电机尺寸增大,加大了布置的难度[2]。针对此问题,本文提出了一种前后轴独立驱动的增程式电动汽车驱动系统结构,从而减小了整车布置难度。
1 前后轴独立驱动增程式电动汽车结构分析
增程式电动汽车主要由驱动电机、动力电池和增程器APU(发动机和发电机)组成[3]。如图1所示,该增程式电动汽车在前后各有一个驱动电机和主减速器独立驱动前后轴,驱动电机需求由动力电池或APU供电。
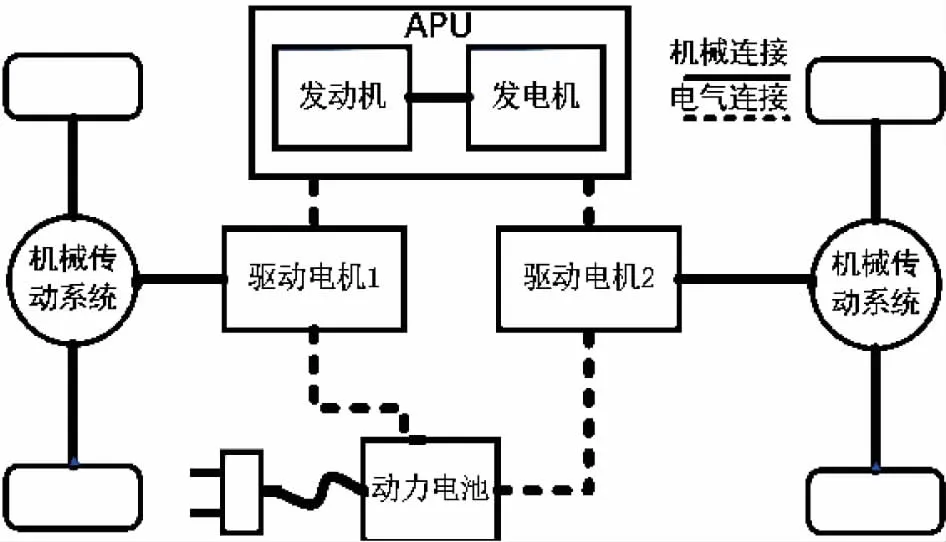
图1 前后轴独立驱动增程式电动汽车结构图
2 前后轴独立驱动增程式电动汽车整车控制策略分析
单电机驱动增程式电动汽车整车控制策略有恒温控制策略、功率跟随控制策略和恒温器-功率跟随控制策略3种。本文提出了前后轴独立驱动增程式电动汽车逻辑门限控制策略,合理控制双驱动电机和增程器,降低了能量消耗率。
本文把整车工作模式分为纯电驱动模式和增程模式两种。纯电驱动模式下整车需求功率由动力电池提供,增程模式下整车需求功率由增程器APU提供。
当整车需求功率小于60 kW且动力电池SOC大于30%时,整车需求功率由动力电池提供;当整车需求功率大于60 kW或动力电池SOC小于30%时,整车需求功率由APU提供。同时,当整车处于增程模式时,为避免发动机的频繁启动,动力电池SOC需达到80%时,整车工作模式才能切换至纯电驱动模式。整车切换逻辑如图2所示。
本文使用Simulink搭建整车控制策略模型,Cruise搭建动力学模型。通过Cruise可以计算整车加速踏板强度AP和制动踏板强度BP。在纯电驱动模式或增程模式下,根据加速踏板强度和制动踏板强度将整车工作模式分为驱动模式、制动模式和滑行模式3种[4]。当AP大于0时,整车处于驱动状态,BP大于0时整车处于制动状态,AP和BP同时大于0时整车处于滑行状态。
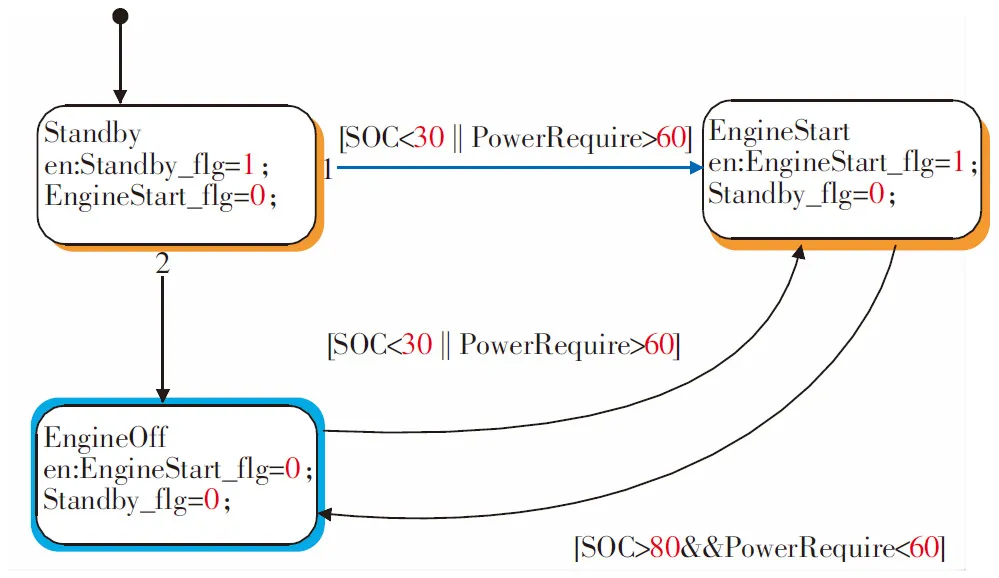
图2 纯电模式与增程模式切换逻辑
整车需求功率由加速踏板强度计算得出,通过加速踏板强度计算前后驱动电机需求功率,而整车需求功率即为前后驱动电机需求功率之和。整车需求功率preq计算公式如式(1)所示。其中Tmaxnr为后驱动电机转速nr对应的最大输出转矩。
(1)
整车制动力矩由需求制动压强和前后制动器参数计算得到,整车需求制动力矩计算公式如式(2)所示。其中:Mb为整车需求制动力矩;Abf、Abr为前后摩擦片面积;ηbf、ηbr为前后制动器效率;Pbf、Pbr为前后制动器制动压强;rbf、rbr为前后制动器有效摩擦半径;μbf、μbr为前后制动器摩擦系数;cbf、cbr为前后制动器制动因素。
Mb=2PbfAbfηbfμbfrbfcbf+2PbrAbrηbrμbrrbrcbr
(2)
2.1 纯电驱动模式
纯电驱动模式下整车需求功率由动力电池提供,发动机停止工作。纯电驱动模式下整车根据需求功率的不同整车可处于驱动模式、制动模式和滑行模式3种。为保证整车平稳行驶,本文采用前后轴驱动转矩相等的控制策略[5]。驱动模式下前电机负载强度为AP,因此后驱动电机负载强度pedelmr可由公式(3)计算得出:
(3)
式中:Tnf为前驱动电机输出转矩;Tmaxnr为后驱动电机在转速nr下的最大输出转矩;iof、ior为前后轴主减速器传动比。
制动时,根据SOC和V计算并分配驱动电机再生制动力矩和前后制动器制动力矩。当整车处于滑行模式时,根据动力电池SOC值决定是否回收滑行能量。纯电模式整车驱动模型如图3所示。
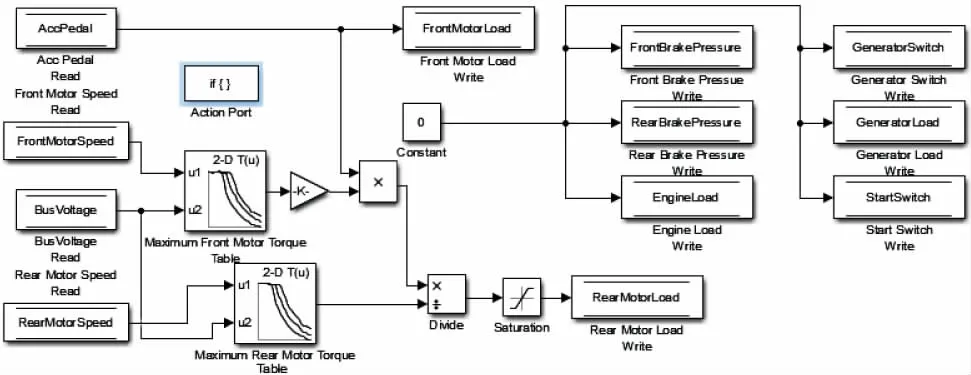
图3 纯电模式整车驱动模型
2.2 增程模式
增程模式指当动力电池SOC不足或整车需求功率较大时,发动机-发电机组启动为整车提供需求功率[6-7]。该模式下前后驱动电机的输出转矩计算方式和纯电驱动模式相同,而发动机根据整车需求功率的不同而工作在不同的工作点。增程模式整车驱动模型如图4所示。

图4 增程模式整车驱动模型
本文根据发动机输出功率的不同选取了3个不同发动机输出功率的工作点。3个工作点均根据发动机万有特性曲线图计算得出,分别取发动机输出功率为20、40、60 kW的工作点,3个工作点均处于发动机最有燃油经济性曲线上。控制策略可使发动机根据整车需求功率的不同在3个工作点之间切换,并沿着最优经济性曲线运转到目标工作点上。
为了避免制动模式下发动机频繁启动,滑行模式下电池SOC小于95%时发动机仍工作在上一个工作点为动力电池充电,则发动机的负载强度为
(4)
发电机的需求转矩为
(5)
发电机的负载强度为
(6)
式中:Tfuelmin为不同转速下发动机的最小燃油消耗点对应的转矩;Tmax为Tfuelmin对应的转速的最大输出转矩;ngen为发电机转速;Tmaxgen为发电机需求输出转矩Treqeng对应的发电机转速下所能输出的最大转矩。
3 整车模型与整车性能分析
3.1 整车模型
本文使用AVL-Cruise搭建整车模型,实现了对驱动电机、发动机、发电机以及车轮等模块的建模,而AVL-Cruise相比Matlab/Simulink在实现较为复杂的控制策略建模存在劣势;因此,本文使用Matlab/Simulink搭建了整车控制策略模型。
本文选用一款大型7座SUV作为仿真车辆,其整车基本参数如表1所示。

表1 整车基本参数
驱动电机、发电机、发动机、主减速器的主要参数如表2所示。

表2 动力系统参数
整车控制策略模型如图5所示。
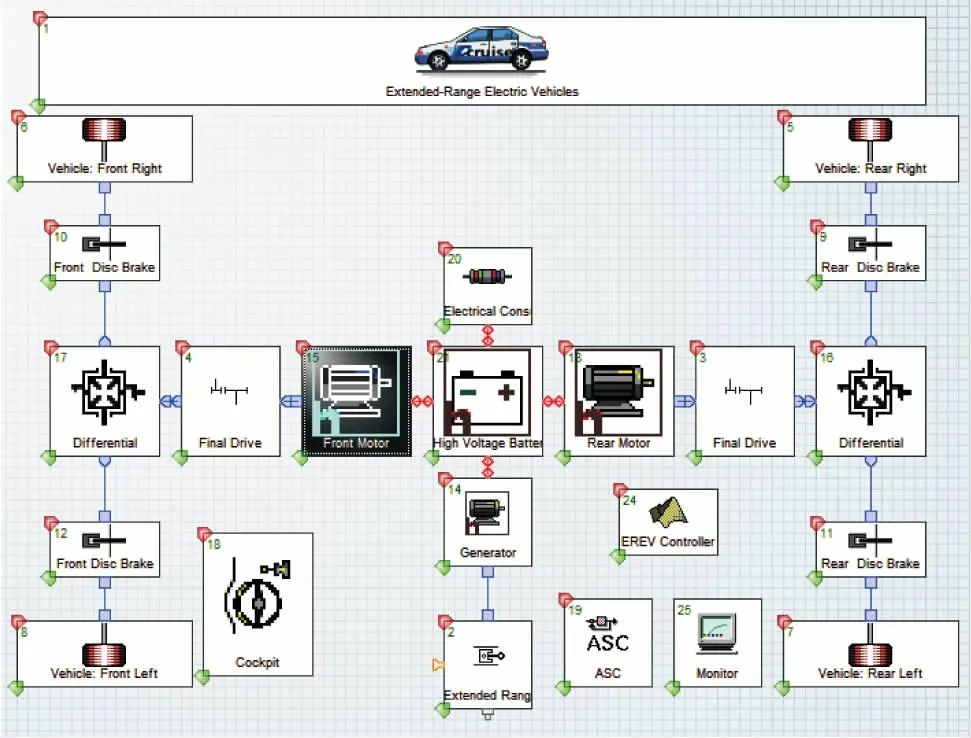
图5 前后驱动增程式电动汽车整车模型
3.2 整车性能仿真结果分析
该控制策略下NEDC工况车速跟随情况如图6所示,结果表明该控制策略下可实现良好的车速跟随效果。
整车从车速0全负荷加速至100 km/h所用的时间约为7.8 s,表明整车有较好的动力性能。该车的加速性能仿真结果如图7所示。
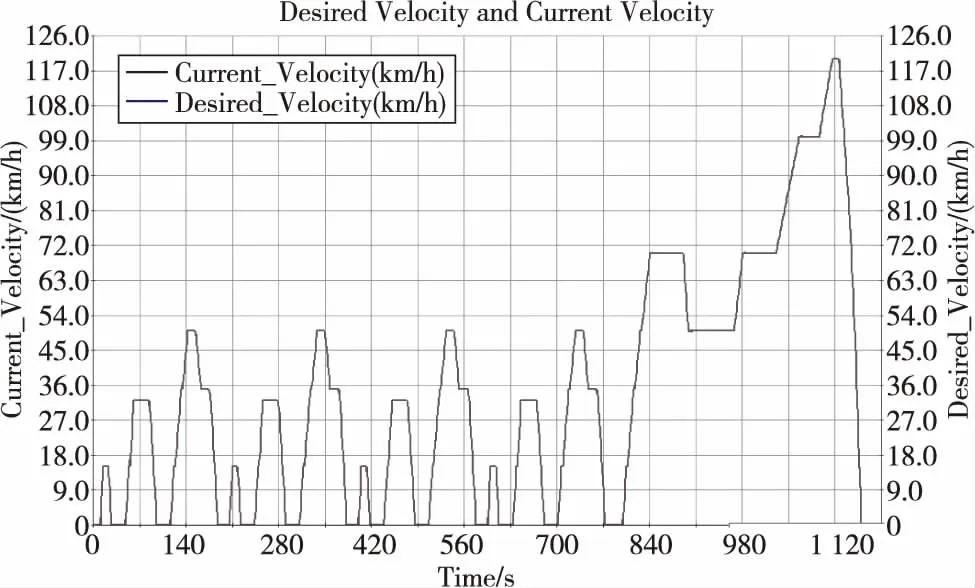
图6 NEDC工况当前车速与期望车速比较
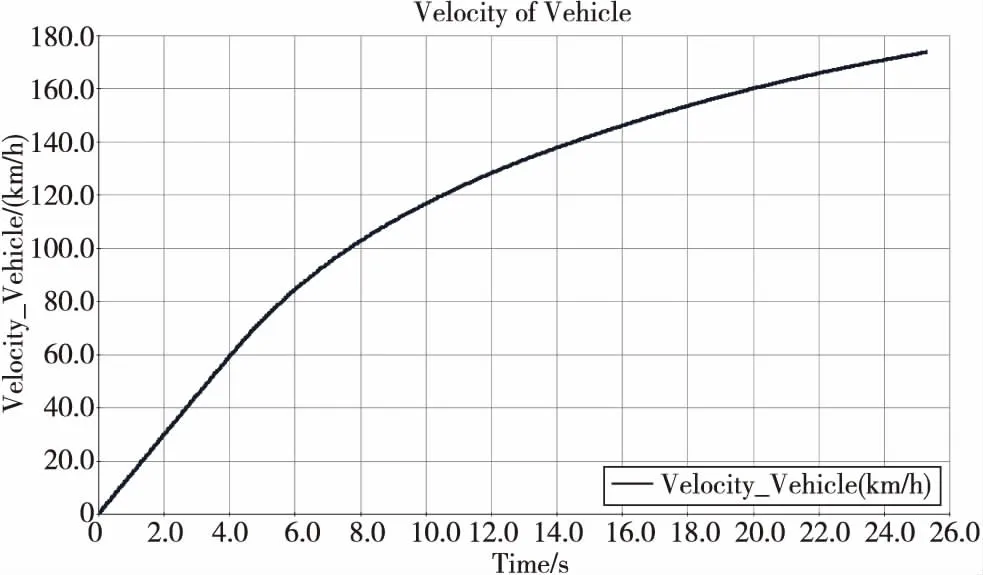
图7 整车加速性能仿真结果
仿真车辆的爬坡性能仿真结果如图8所示。该车以10 km/h速度能爬上的最大坡度约为42%,表明整车有较好的爬坡性能。

图8 整车爬坡性能仿真结果
图9为NEDC工况下当整车处于增程模式时的发动机输出扭矩和SOC变化图。由图可知:10 865~10 875 s期间发动机处于加速状态,整车需求功率持续增加,发动机输出功率由20 kW左右切换至40 kW附近;在10 900~10 910 s附近车辆处于减速状态,整车处于制动或滑行状态,发动机继续工作并维持之前的输出扭矩。结果表明该控制策略可实现避免发动机频繁启动,且发动机在不同的整车需求功率下均输出预设的功率。综上可知仿真结果符合增程模式控制策略。
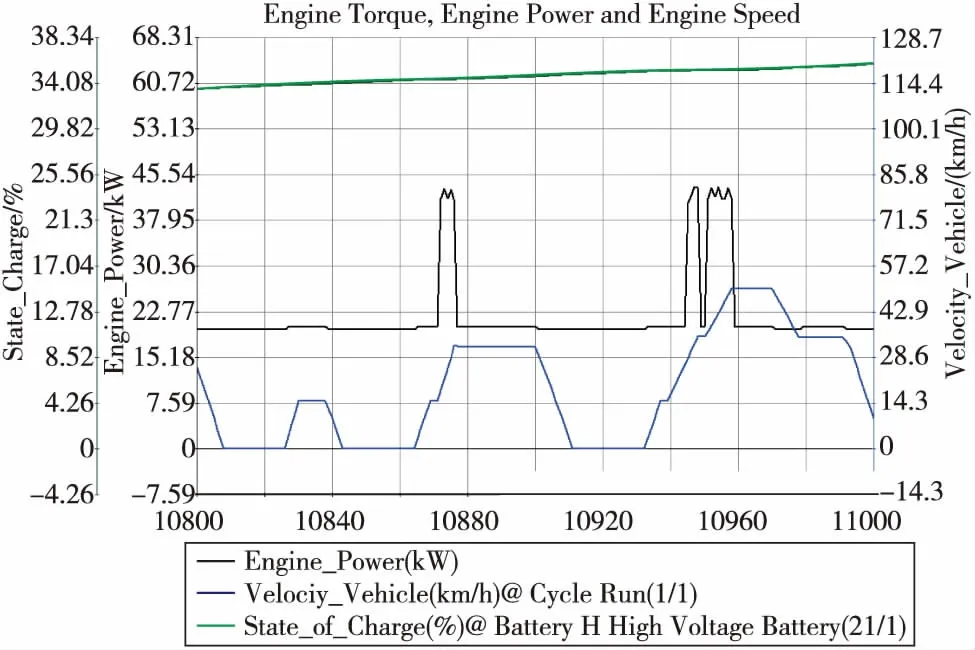
图9 NEDC工况发动机输出转矩
图10为NEDC工况下发动机工作点仿真结果。设置动力电池初始荷电状态仿真初始参数为29%,目的是使整车处于增程模式,发动机启动为整车提供需求功率。由图10可知,当整车处于增程模式时,发动机的工作点主 要集中在(0 r/min、0 Nm)、(1 900 r/min、90 Nm左右)这两个工作点。工作点(0 r/min、0 Nm)代表发动机未参与工作,此时整车处于静止状态;工作点(1900 r/min、90Nm左右)与控制策略预设的工作点相同,可知控制策略可实现较好的经济性能。

图10 NEDC工况发动机工作点分布图
4 结束语
本文提出了一种前后轴独立驱动的增程式电动汽车逻辑门限整车控制策略,并使用Matlab/Simulink和ACL-Cruise软件联合仿真前后轴独立驱动增程式电动汽车联合仿真模型。仿真结果表明该控制策略可以良好实现车速跟随,且在增程模式下发动机可以根据整车需求功率的不同而工作在不同的工作点上,实现了在保证整车动力性的前提下对燃油消耗率的良好控制。
