面向目标定位的多主动传感器优化布站
2019-09-17单甘霖段修生
俞 宙,单甘霖,段修生
(陆军工程大学石家庄校区,石家庄 050003)
0 引言
随着电磁干扰、反辐射导弹、超低空突防、隐身武器的快速发展,战术侦察系统面临着巨大的挑战和威胁[1]。战术侦察系统目前部署了不同频段、不同平台、不同体制的雷达、预警机和侦察车等传感器。通过对分布在不同位置的多部传感器优化布站,既可以保证探测和定位的连续性,又可以综合利用多传感器的资源,获得更详细而精确的目标信息,提升系统对隐身目标、小目标、低空目标和高速机动目标的及时准确定位和跟踪能力,从整体上达到布站最佳性能,见文献[2-10]。
本文在上述研究的基础上,描述了多传感器优化布站问题,提出了一种基于GDOP-CRLB 的目标定位精度衡量方法。 首先分析和推导了GDOP-CRLB 计算表达式,分析了传感器几何布站形式、传感器的数量、测量精度以及相对高度对传感器定位精度的影响,并且给出了提高定位精度的传感器布站策略。所提方法在多传感器布站方面具有普遍适用性和应用价值,最后通过仿真实验验证了所提方法的有效性。
1 多传感器优化布站问题描述
传感器优化布站是依据不同的条件(如数量、类型)和目的(定位精度、空域覆盖率、成本),通过优化计算获得最符合期望的定位效果。主要涉及两个方面:一是对传感器布站数目的优化;二是数目确定后,如把传感器放置在最合理的位置上。此外,还需要考虑实际应用中的作战需求、地理环境、成本造价等客观因素。主要包括优化布站的原则、传感器的配置以及阵地的选择[11]。
1.1 布站原则
战术侦察系统中传感器布站通常包括以下原则:1)责任区内实现最大探测范围;2)高、中、低仰角覆盖,远、中、近距离探测一体化;3)机动、屏蔽与防护一体化;4)频率与空间一体化。
1.2 传感器配置
为提高系统性能,合理配置传感器,提高“四抗”能力,本文提出以下配置要求:1)有源、无源传感器搭配;2)空中、地面传感器搭配;3)二坐标雷达、三坐标搭配;4)高精度、低精度传感器搭配。
1.3 布站阵地
布站阵地的选择主要考虑生存因素、环境因素和战术因素3 个方面。
1)生存因素。布站阵地应选择在己方防空火力的掩护范围内,且阵地距敌方前沿阵地不要太近,防止被敌方反辐射武器直接打击。
2)环境因素。布站阵地的选择应考虑气象、水文、电磁、地理环境等对于传感器侦察性能的影响、对侦察平台机动能力的影响。地势应平坦开阔,不能有过大遮蔽角,周边交通良好,方便机动转移。
3)战术因素。要保证阵地与布站中心通信正常、数据传输顺畅。同时与被保护目标保持适度距离。为避免电子干扰,与己方的电子对抗部队也要保持一定距离。
2 目标定位精度



由坐标系之间的转换关系得:


式中,J 为Fisher 信息矩阵:


则X 的极大似然估计为:


式中,C 为常数项。则式(5)可化简为:

对m(X)求导,得:

代入式(9),得:
又因为:
所以式(11)可以化简为:



同时引入(Geometrical Dilution Of Precision,GDOP)作为评价指标[12],来衡量定位精度。则GDOP-CRLB 定义为:

根据式(18)可以求出空间任意一点处GDOP 的极限值,且因为直接使用传感器原始量测数据的似然函数来计算GDOP,所以结果具有普遍性和通用性,既适用于主动传感器和被动传感器,也适用于混合传感器。下面进行仿真来分析传感器数量、几何布站形式、测量精度对GDOP-CRLB 极限值分布的影响。
3 仿真实验与结果分析
仿真1:数量对GDOP-CRLB 的影响
设某侦察系统中,主动传感器对距离的测量精度为σr=0.3 km,对方位角和高低角的测量精度分别为σθ=2°和σφ=3°。对2 部~4 部传感器进行直线形布站,布站情况如表1 所示,对空域200 km×200 km 进行探测,x 的坐标范围为[-100 km,100 km],y 的坐标范围为[-100 km,100 km]。分别计算目标在高度10 km 和1 km 处的GDOP,仿真如图1~图3 所示。

表1 仿真1 传感器布站情况
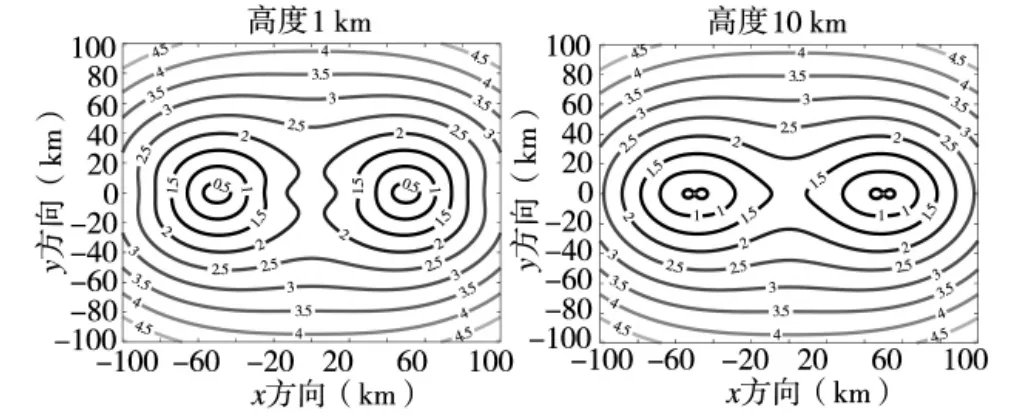
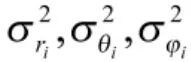
图1 2 站主动传感器直线形布站下不同高度的GDOP-CRLB 分布

图2 3 站主动传感器直线形布站下不同高度的GDOP-CRLB 分布
由仿真1 可知,随着传感器数量不断增加,系统定位精度也在不断提高;并且目标处于10 km 处的定位精度要高于目标处于1 km 处的定位精度,符合主动传感器难以探测超低空目标实际特性。
仿真2:布站几何对GDOP-CRLB 的影响

图3 4 站主动传感器直线形布站下不同高度的GDOP-CRLB 分布
对3 部~4 部传感器进行布站,布站情况如下页表2 所示,对空域200 km×200 km 进行探测。分别计算目标在高度10 km 和1 km 处的GDOP,仿真情况如表2 及下页图4~图7 所示。
由仿真2 可知,相同数量的传感器,不同的几何布站形式下定位精度不尽相同;当目标处于多传感器布站所形成的的几何多边形内时,定位精度较高,处于外部时,定位精度较低;目标处于两相邻传感器的基线上时,定位精度比较高。
仿真3:测量精度对GDOP-CRLB 的影响

表2 仿真2 传感器布站情况
以3 部主动传感器等边三角形布站为例,依次改变传感器的测距精度、测方位角精度以及测高低角精度,分别计算目标在高度10 km 和1 km 处的GDOP 分布,仿真情况如表3 及图8~图10 所示。

图4 3 站主动传感器直角三角形布站下不同高度的GDOP-CRLB 分布

图5 3 站主动传感器等边三角形布站下不同高度的GDOP-CRLB 分布

图6 4 站主动传感器正方形形布站下不同高度的GDOP-CRLB 分布

图7 4 站主动传感器菱形布站下不同高度的GDOP-CRLB 分布

表3 仿真3 传感器参数
图8 σr=0.4 km,σθ=2°和σφ=3°时不同高度的GDOP-CRLB 分布
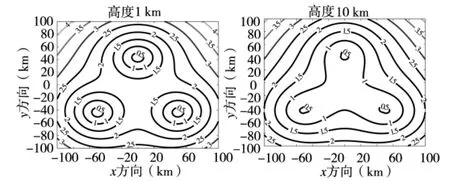
图9 σr=0.3 km,σθ=3°和σφ=3°时不同高度的GDOP-CRLB 分布
对比图5 和图8~图10 可知,定位精度受测量精度的影响较大,随着测距精度和测角精度的增大,GDOP-CRLB 的分布值增大,定位精度越差。

图10 σr=0.3 km,σθ=2°和σφ=4°时不同高度的GDOP-CRLB 分布
4 结论
本文针对多主动传感器优化布站问题,提出了一种基于GDOP-CRLB 的目标定位精度衡量方法,给出了GDOP-CRLB 计算表达式。通过理论分析和仿真实验可以看出,GDOP-CRLB 的分布值与传感器数量、几何布站形式、测量精度以及相对高度有关。同时给出以下优化布站策略,对于多传感器的优化布站应用具有参考意义。
1)传感器数量越多,定位精度越高,且目标处于优化布站所形成的几何多边形内部时的定位精度高于外部,处在多边形外部时,与传感器距离越远,定位精度越差。
2)通过调整布站形成的多边形顶点到几何中心的距离,有利于提高传感器系统的定位精度。
3)提高距离、方位角和俯仰角的测量精度,有利于提高侦察系统的定位精度。
因此,实际布站时,应该充分考虑目标探测空域和地理约束条件进行优化布站。