俄罗斯载人月球探测计划最新进展
2019-09-17苑艺何慧东北京空间科技信息研究所
苑艺 何慧东(北京空间科技信息研究所)
1 俄罗斯载人航天活动主要目标
俄罗斯载人航天领域近期和中期目标是根据《2030年前及未来俄罗斯航天发展准则》建立先进的载人航天综合系统,主要致力于解决两个基本问题。
1)完成“国际空间站”俄罗斯舱段的建造工作,并确保其能够得到高效利用,同时扩大低地球轨道的科学应用研究。
2)建设先进的载人运输系统和空间基础设施,确保在2030年左右实现绕月轨道以及月球的载人飞行。
2 低地球轨道载人航天活动
俄罗斯计划向“国际空间站”补充发射3个新舱段:科学号(Nauka)多功能实验舱(MLM,2020年)、码头号(Prichal)节点舱(UM,2021年)以及科学-动力舱(HEM,2022年)。通过扩大俄罗斯舱段的规模,在“国际空间站”舱内和舱外开展更加广泛的科学研究。同时,俄罗斯正与国际伙伴商讨将“国际空间站”延期运营到2028-2030年的可行性。

俄罗斯轨道站外形图
在“国际空间站”退役后,俄罗斯计划采取合适的解决方案,在新舱段的基础上建立俄罗斯轨道站(ROS)。
3 载人月球探测计划路线图
俄罗斯为实现月球计划,分阶段开展月球探测工作。
第一阶段:利用无人探测器进行月球探测,进行设备和技术的研发,利用“国际空间站”验证载人飞船,实现绕月飞行并建立有人照料绕月站。根据计划,2021年起,先后发射月球-25、26、27和28(Luna-25、26、27和28)无人探测器,开展月球研究,并为建立月球试验场和载人月球飞行做准备。
第二阶段:研制可以抵达月球表面的设备,利用有人照料绕月站将首批月球考察队送往月球,在月球表面建立和部署月球基地的首批组件。
第三阶段:建立和开发有人照料的月球基地,研制有人和无人两种模式结合的综合系统,开展月球研究和探索活动。
4 月球探测系统
月球轨道和月球表面基础设施
俄罗斯综合利用无人和有人两种方式开展月球探索和研究活动,相关设施均纳入月球轨道和月球表面基础设施,具体包括以下几个部分。
1)通信和导航卫星:为无人和有人月球探测活动提供通信和导航服务。

俄罗斯月球计划重要节点

月球轨道和月球表面基础设施图
2)自主探测器:载人登月前,对特定区域进行探测,同时深入开展月球研究。
3)绕月站:作为月球探测活动的中转站,为可重复使用装置,在绕月轨道与载人飞船和月球着陆上升器对接,解除进入月球表面的限制。绕月站可确保考察队在月球表面持续停留超过3天,同时可支持开发从月球飞向更远深空的技术。
4)月球着陆上升器:绕月站和月球表面之间的往返运输工具,实现人员、科学设备、样品的运输,确保人员在月球表面开展工作。
5)月球基地:包括基础舱、动力舱、实验舱等。基础舱可支持航天员在月球表面开展长期考察任务;动力舱为月球基地自主电站;实验舱配备相关科学设备,可开展科学实验和研究。同时,月球基地具备与月球车对接的能力,还能够支持出舱活动。
6)自动推进舱:即月球车,可协助航天员在月球表面移动,能够自主收集样本,航天员不需出舱即可开展相关活动。

有人照料绕月站

月球计划运输系统关键组成部分
月球探索的第一步可能是建立有人照料绕月站。目前,俄罗斯正在探讨在绕月轨道上建立有人照料平台的概念。俄罗斯计划以“国际空间站”俄罗斯部分舱段(节点舱和科学-动力舱)为基础,同时结合联邦号飞船的发动机装置,研制绕月站的基础舱段。
运输系统
为实现月球探测目标,同时兼顾低地球轨道载人航天任务需要,俄罗斯计划研制相关运输系统,包括超重型运载火箭、轨道间牵引器、联盟-5(Soyuz-5)中型运载火箭、新一代载人飞船——联邦号载人飞船等。为了在月球表面勘测,还需要研制月球着陆上升器。
(1)超重型运载火箭和轨道间牵引器
俄罗斯计划为载人月球探测任务研制超重型运载火箭,火箭200km圆轨道运载能力不低于88t。
同时,研制轨道间牵引器,KVTK型轨道间牵引器将提供飞离推力,DM型轨道间牵引器将用于确保助推加速。
(2)联盟-5运载火箭
联邦号飞船将在低地球轨道开展一系列试验任务,使用联盟-5中型运载火箭发射入轨。
联盟-5火箭采用两级串联构型,使用液氧/煤油推进剂。火箭一级采用RD-171MV发动机,该发动机是RD-171M的改进型,后者应用于“天顶”(Zenit)运载火箭,并通过多年的飞行证明了自身的高效性和可靠性;火箭二级采用RD-0124MS发动机,该发动机是在RD-0124的基础上进行改进的,后者应用于联盟-2.1b运载火箭。
为确保联邦号载人飞船发射和与“国际空间站”对接,俄罗斯计划在拜科努尔航天发射中心对“天顶”火箭的地面基础设施进行改造,使其可用于联盟-5火箭的发射。

联盟-5运载火箭技术参数
(3)联邦号载人飞船
俄罗斯联邦号飞船主要用于月球探测任务,并能够完成低地球轨道空间站的技术维护,能够自主开展空间实验和研究。飞船发射质量为20t,在短期向月飞行时,飞船可重复使用10次;在与绕月轨道站对接进行长期飞行时,飞船可重复使用不少于3次。联邦号飞船最多可搭载4人,可在轨自主飞行近30天,也可停靠在空间站上在轨驻留近1年的时间。
联邦号飞船头部以暴露的形式安装在运载火箭顶部,承担整流罩的功能;使用两级火箭紧急逃逸系统,保障乘组人员在整个入轨阶段的安全;采用了实用新型结构材料和热防护材料,改善飞船的性能(合金材料强度将增加1.2~1.5倍,热防护材料使用碳纤维材料和三层设计,材料密度是“联盟”飞船的1/3);依靠起落架系统实现垂直软着陆,保障飞船能够重复使用。飞船的通信、导航和定位通过卫星实时完成,“射线”(Luch)中继卫星以及控制回路能够以统一的数字格式对运行在地球轨道的载人飞船进行控制。
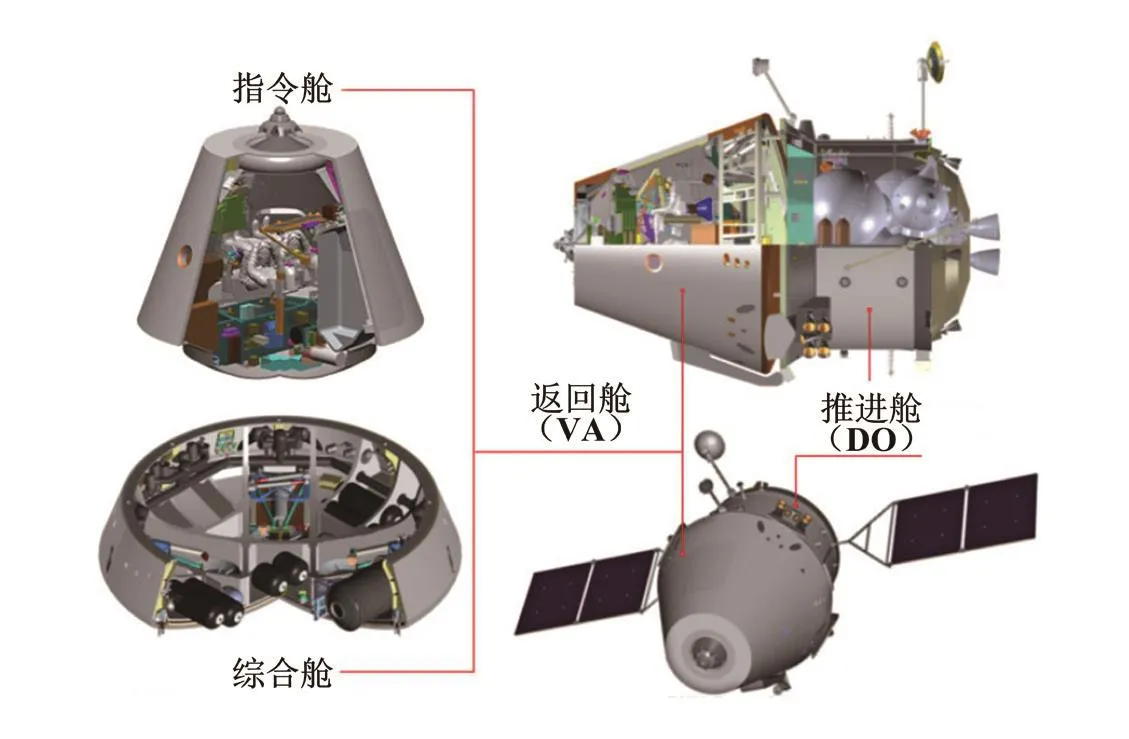
联邦号飞船结构示意图
联邦号飞船空间较大,在长期飞行中航天员可以完全伸直双腿并能在失重条件下全身站立,飞船舱内还配备了全新用复合材料制作的座椅,预计每个座椅可以节约15~20kg的质量。同时,飞船上能储备大量的食物和水,还配备舒适的卫生间和污水处理装置。
测控系统
联邦号飞船在飞往月球的过程中计划利用S频段和X频段实现大量控制指令、文件、遥测信息、电视信号、电话通信,以及导航参数实时变化信息的收发。
导航系统
飞行过程中,计划通过飞船自身导航装置和导航卫星共同解决导航问题。对于导航卫星建议分3个阶段开展相关工作:第一阶段,利用现有在轨卫星;第二阶段,对低地球轨道卫星进行升级改造;第三阶段,建立先进的绕月轨道导航卫星集群。
其他关键技术
机器人技术是俄罗斯发展的最具有前景的技术之一。目前,“国际空间站”俄罗斯舱段正在开发名为“货物起重臂”的机械操纵装置。作为多功能实验舱的一部分,“欧洲机械臂”(ERA)将被送入轨道。科学-动力舱将载有自动重新对接电子机械操纵装置。
俄罗斯目前开展的空间机器人技术有:“太空机器人”(Kosmorobot)项目,研制可用于在科学-动力舱外表面执行装配、维修及其他技术操作的自动装置;“可视机器人”(Teledroid)项目,研制可在“国际空间站”俄罗斯舱段外表面进行局部维修的仿真机器人;“测试员”(Tester)项目,研制可在载人飞船内和“国际空间站”俄罗斯舱段执行工作的自主机器人。

联邦号载人飞船的通信保障

太空机器人技术项目
此外,为确保提升质量和可靠性,同时降低火箭航天技术产品的研制成本,能源火箭航天集团计划引入数字化生产,可带来如下益处:工艺基准可为端到端产品开发提供统一的环境;能够以电子形式发布新产品的施工设计文件;利用3D技术建模;扩大计算机建模的应用,从而降低实际加工量。
5 结束语
现阶段,俄罗斯利用“国际空间站”开发飞往月球及更远深空的相关技术,同时,着手制定关于月球探索和研究的一系列国家专项规划,包括开发先进的航天运输系统,以及月球着陆上升和货运综合系统。
未来,俄罗斯载人月球探测活动需要就本国计划与国际合作计划进行深入研究,解决与国际伙伴共同开展月球探测活动所面临的诸多重要问题。
