基于“吉林一号”视频卫星的天基空间目标观测研究
2019-09-15解延浩马驰钟兴杨旭孟德利曲直
解延浩,马驰,钟兴,杨旭,孟德利,曲直
(1.长光卫星技术有限公司,长春 130000;2.国家天文台,北京 100020;3.中国科学院长春光机所,长春 130000)
1 引言
近年来,随着电子、通信、光学、卫星制造和运载等技术的不断发展与遥感通信和空间试验需求的快速增长,在轨卫星的数量呈现井喷态势,尤其是1000km以下的近地轨道已日益拥挤。例如,美国“鸽群”星座在轨数量已达140多颗,仅2017年2月15日一次发射就入轨88颗(该次发射为一箭104星)。另外美国SpaceX公司于2019年5月15日发射60颗StarLink卫星入轨,并计划建立12000颗卫星的庞大近地轨道星座。近地轨道在轨卫星与计划入轨卫星数目的激增令卫星碰撞规避预警和在轨状态监控面临空前压力,急需更多更有效、灵活的监测手段。
传统的地基在轨目标监测虽然技术成熟性能可靠,但往往覆盖范围有限、灵活性差且受到地理和天气等诸多限制,相比之下天基空间目标观测有着不受地理和大气影响、探测范围广且机动灵活等优点。而其中视频卫星凭借其优良的对动态目标的捕捉能力和低亮度目标识别能力,被视为空间目标观测的首选。
目前以美国为代表的发达国家在天基空间目标检测与天基导弹预警方面已钻研多年,形成了红外/可见光结合、军用/民用互补的态势,在提升系统性能的同时大大降低了系统脆弱性[1]。其中当属美国的空间监视和跟踪系统 (SSTS)系统,配备了宽视场扫描型短波红外传感器 (捕获用)和窄视场面阵多波段传感器 (跟踪用),具有极强的区域覆盖与目标捕获能力,目前主要用于导弹预警拦截[2,3]。目前国内利用视频卫星对空间目标进行持续观测的案例仍十分稀少,研究多局限于资源分配算法[4,5]、专用光学载荷研究[6]和基于空间成像信息的目标定轨技术[7]等方面,对工程实践中面临的窗口搜索、任务执行和数据处理鲜有著述,实践积累薄弱。
“吉林一号”星座中包含6颗在轨视频卫星,轨道为535km太阳同步轨道,分两个轨道面,降交点地方时分别为12∶00与10∶00。作为目前国内少有的高分辨率、高机动能力、多任务模式遥感卫星,除满足对地成像需求外,其软硬件性能完全可以胜任对空间目标成像任务。近期,针对用户对空间目标交汇成像的需求和凭借可见光成像数据对空间目标定轨的需求,尝试利用“吉林一号”视频卫星进行了多次对惯性空间目标成像,不仅验证了“吉林一号”视频卫星用于天基观测的可行性,更进一步探索了以下关键问题——首先是空间目标交汇预测与视频星成像窗口搜索,并在此基础上分析了“吉林一号”视频星座对典型低轨目标的覆盖能力;其次,探索多种成像方式,包括定点拍摄、追踪拍摄与多点组合拍摄,分析了各模式的图像特点、轨道容错特点与适用场景等;另外,研究了事后任务分析与基于多帧图像的点目标提取。以上问题的基本解决标志着“吉林一号”视频卫星已具有较完整的对空间目标观测成像能力,可以为空间碰撞预警、态势感知和空间环境研究提供支持。
2 窗口搜索与星座覆盖分析
2.1 窗口搜索与任务规划
对于空间目标成像任务窗口搜索与规划,首先需要有在未来一段时间内,遥感卫星、目标卫星、地球、太阳的相对位置关系与相对运动状态。因此在专用软件中使用了HPOP模型和最新精轨瞬根外推轨道,可以确保轨道递推5日内位置误差小于1km。利用递推得到的卫星和目标的J2000系下位置速度,可以计算在未来一段时间内卫星与目标的相对关系:
设t时刻卫星位置速度为Vsat(t)、Rsat(t),目标位置速度为Vtar(t)、Rtar(t),则在J2000系下卫星指向目标向量为:

目标相对卫星线速度为:

目标相对卫星速度可分为法向分量与切向分量,其中切向分量为:

则可以求出目标在卫星视场中相对卫星的角速度:

另外,若任务要求成像背景为地球,则需要保证地球不遮挡卫星视线:
由当前J2000位置坐标可以计算当前卫星视角下的地球张角:

由上文中所得卫星指向目标向量Rsat2tar(t)结合卫星指向地心向量-Rsat(t),可得卫星在拍摄时镜头光轴方向与地心方向夹角:

另外由J2000坐标系和黄道坐标系的相对关系可以得到当时的太阳矢量方向Rsun,由同样的方法可以计算得到当前卫星/目标位于地影区还是阳照区,且可以求出当前卫星成像的太阳光照角和星上传感器的光照角,为窗口选取提供依据。
综上,卫星在对空间目标成像时需要满足的距离约束、目标相对角速度约束、地球视线遮挡约束、太阳光照约束等条件都可以实时计算出来,并依此进行判断当前时刻是否为任务窗口。
确定任务窗口后,即可确定卫星成像时的姿态指向。假设卫星体坐标系定义为:相机光轴方向为Z轴,俯仰轴为Y轴,侧摆轴为X轴,且相机视场为长边平行Y轴的长方形。
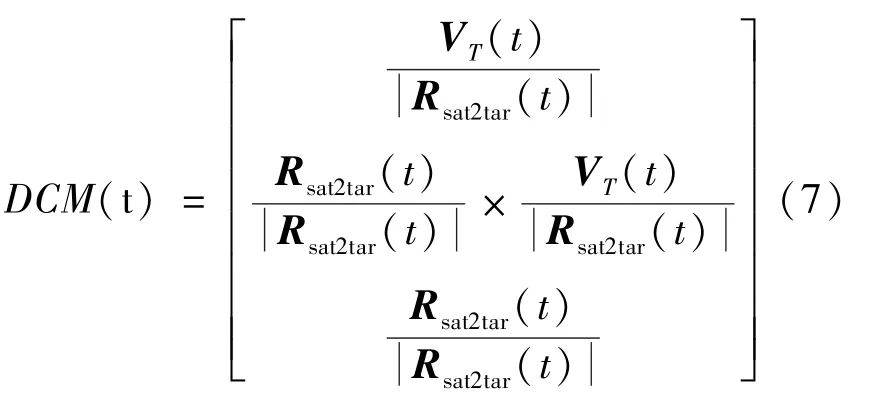
在成像中心时刻,一般要求卫星正好拍到目标,则令此时Z轴指向目标,为增大目标垂直速度方向轨道递推误差容错,令X轴指向目标相对卫星运动线速度方向,则可得到此时用方向余弦阵表示的卫星姿态:
由此即可得到任务的时间与卫星当时姿态,但窗口时长通常远大于单个任务时长,因此实际窗口的选取需要考虑距离、光照、相对角速度等诸多变量的取舍。
若采用惯性空间定点成像,则用此姿态、时间规划任务即可,另外曝光参数可使用外置或根据成像条件自动设置相应的数值。若采用追踪模式,则还应该选取合适的追踪角速度,通常取此时相对角速度再加0.05°/s,以免位置递推地推误差导致全程拍不上。而后再用机动角速度结合任务时长、机动时长回推得到初始期望姿态。
2.2 “吉林一号”星座覆盖能力分析
“吉林一号”视频卫星采用双相机构型,每个相机视场约为0.5×1.2°,角分辨率为0.3"最大识别星等为11等,成像期间姿态机动角速度最大为1°/s。由以上参数结合空间目标可见光识别的任务需求,设置窗口搜索束条件为:
(1)最大成像距离2000km
(2)最大相对角速度4°/s
(3)成像背景为深空背景 (因为需要获取恒星点)
(4)最大太阳光照角 (即相机光轴与太阳光方向夹角)小于90°
为研究“吉林一号”视频卫星对近地轨道目标的覆盖能力,建立典型目标轨道进行分析:目标一为700km高度11∶00太阳同步轨道,其目标内目标轨道系下受光照方位分布,窗口内太阳光照角统计如图1、图2所示;目标二为700km高度45°倾角圆轨道,其目标轨道系下受光照方位分布,窗口内太阳光照角统计,目标轨道系下被拍摄方位分布如图4~图6所示。目标三为700km高度0°倾角圆轨道,其目标轨道系下受光照方位分布,窗口内太阳光照角统计,目标轨道系下被拍摄方位分布如图7~图9所示。分析视频星座6颗卫星对这三个目标30日覆盖情况如下 (仿真步长5s,以下数据点均为成像窗口内数据):
(1)目标一
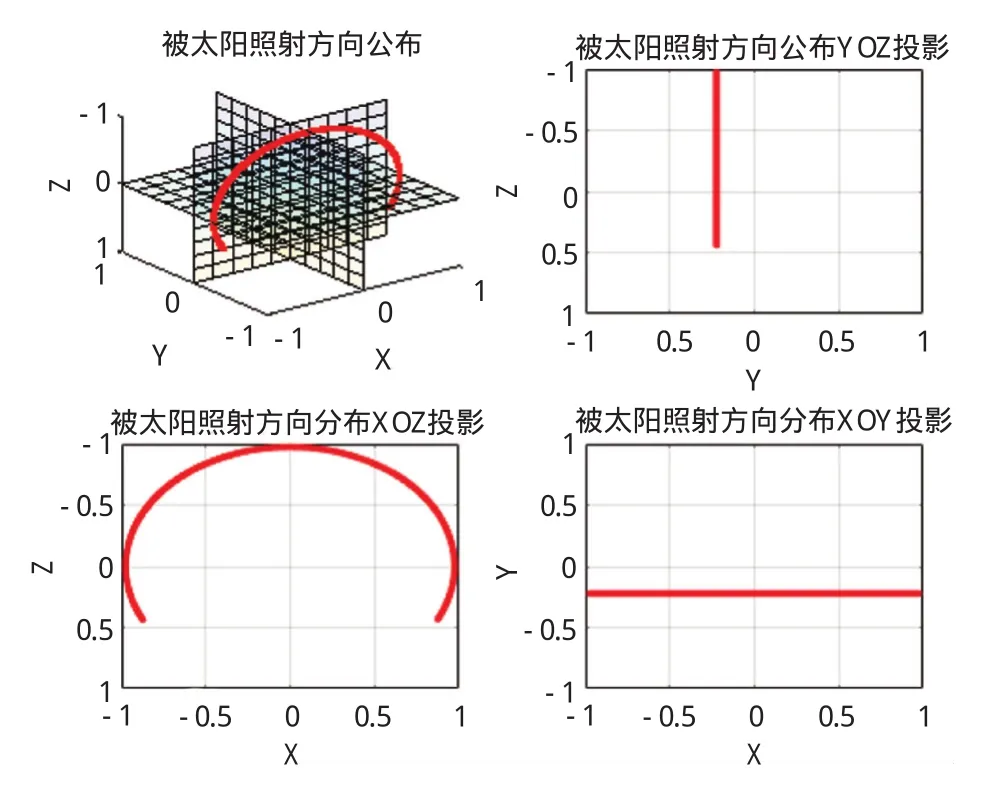
图1 目标轨道系下受光照方位分布Fig.1 Illuminated azimuth distribution in target orbit system
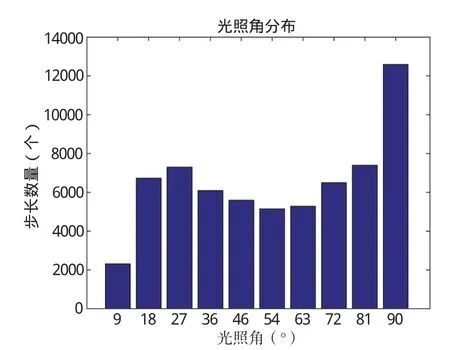
图2 窗口内太阳光照角统计Fig.2 Statistics of solar illumination angle within window
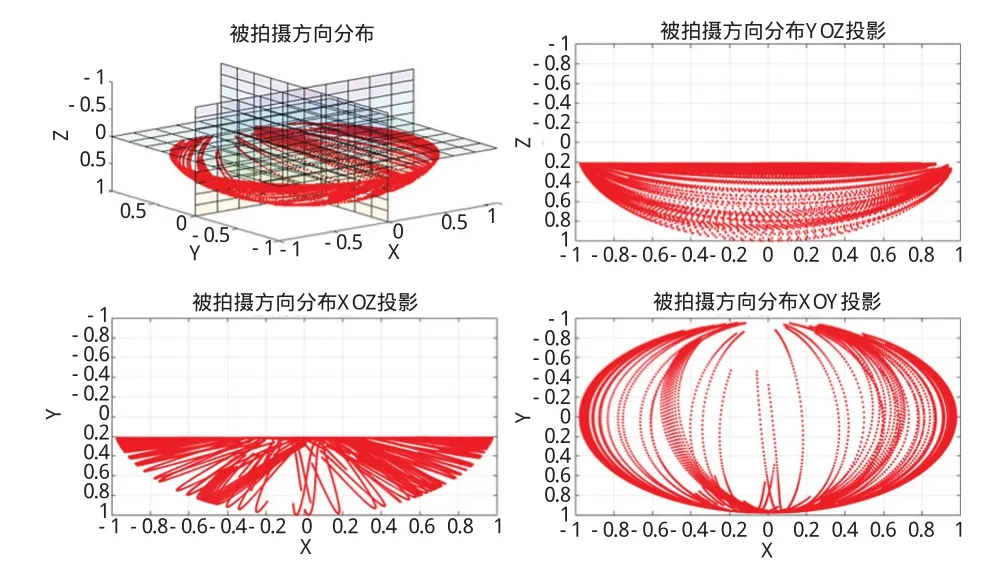
图3 目标轨道系下被拍摄方位分布Fig.3 Photographed azimuth distribution in target orbit system
目标一30日内成像窗口295次,有效步长64918个。由图3可见视频星对于类似轨道 (低轨太阳同步)目标覆盖性较佳,窗口时间较长,说明卫星在轨交汇时相对运动较小。
(2)目标二:
目标二30日内成像窗口463次,有效步长10721个。由图4可见由于其轨道面变化,光照位置覆盖范围较大。而从图6中可见视频星对于轨道面夹角较大的目标覆盖性特点为窗口数量多,窗口时间较短,且更集中于目标轨道系的水平面内。这是因为轨道高度接近而轨道面夹角较大,交汇过程中视频星从目标正上/下方经过时往往出现相对角速度峰值,超过窗口判定阈值,因此目标下方几乎没有成像窗口。

图6 目标轨道系下被拍摄方位分布Fig.6 Photographed azimuth distribution in target orbit system
(3)目标三
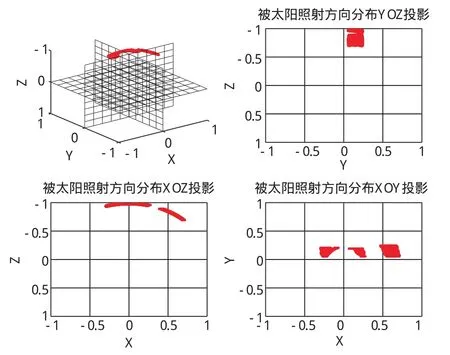
图7 目标轨道系下受光照方位分布Fig.7 Illuminated azimuth distribution in target orbit system
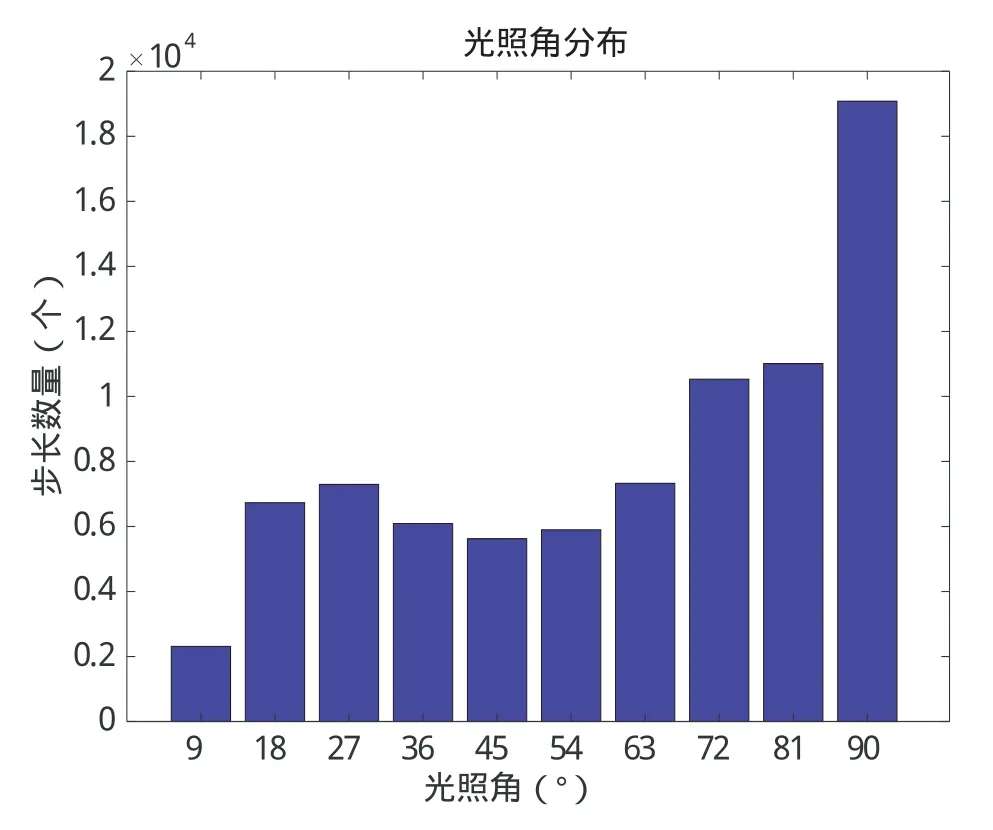
图8 窗口内太阳光照角统计Fig.8 Statistics of solar illumination angle within window

图9 目标轨道系下被拍摄方位分布Fig.9 Photographed azimuth distribution in target orbit system
目标三30日内成像窗口269次,有效步长6257个。零倾角轨道目标覆盖与地倾角目标类似,但窗口数量更少,长度更短,这是因为其与视频星轨道夹角已接近90°,交汇瞬间相对角速度最大,可以视作星座对空间目标成像的最不利情况。

表1 交汇时间统计Tab.1 Intersection time statistics
由上述仿真结果可见,“吉林一号”视频星座对典型近地高、中、低倾角的轨道目标均具有较好的覆盖能力——每个目标每月均至少有超过200次成像机会,且平均交汇时间均在100s以上,且对目标的成像角度和光照覆盖范围较广。在空间目标特性建模和轨道分析方面均具有巨大应用潜力。同时也注意到,对于轨道面夹角较大的交汇情况,由于交会期间相对角速度太大,往往难以观测,因此提高针对高动态目标的成像与追踪能力,是发展天基空间目标近距离成像的重要方向。
3 成像模式探索
“吉林一号”视频卫是一款基于对地高分辨率高机动性遥感成像需求设计的遥感卫星,在设计之初考虑到对空间目标成像和在轨试验的需求,已预留了惯性空间成像的工作模式。发射入轨后经过大量任务实践,进一步探索出多种成像模式,以适应不同需求:
(1)惯性空间固定单点成像——即视频星相对J2000坐标系静止,等待目标经过视频焦面的拍摄方式。目标在视场中会近似匀速直线穿过,且方向与背景一般不相同。该模式适用于相对视频星视场运动角速度较快的目标 (目前取1.2°/s以上),无法追踪所以采用固定拍摄,且可以突出恒星背景,但目标存在拖影,且对递推位置的垂直速度方向位置精度要求较高。以目标沿视场短边经过为例,考虑双相机视场约为2×0.5°,则垂直相对速度方向目标相对方向误差最大允许值应为1°,即对应目标和视频星轨道位置递推误差和应小于。
(2)惯性空间固定多点组合成像——即多个静止拍摄点的组合任务,每个任务点都令目标经过视场,单次任务结束后立即进行姿态机动对准下一次的位置,在每一次任务中视频星都静止不动。该模式可以充分利用交汇窗口,增加对同一目标一次成像的观测次数与时间/空间跨度,且保留恒星背景。
(3)惯性空间单点匀速追踪成像——令目标在任务时间中点时刻正好经过视频星视场正中,且视频星与此时目标的角速度相同,最终目标会在视场中作抛物运动,恒星背景不明显。该模式对轨道递推的速度方向位置精度要求较高,适用于相对角速度不快且不要求背景恒星的任务。
(4)惯性空间推扫——即由曝光要求计算推扫行时,并确定相应的姿态角速度,卫星沿Y轴相对惯性系匀速转动拍摄目标,且此模式仅能拍到一帧图像,该模式适用于线阵曝光卫星的惯性空间成像。
实际成像图例:

图10 惯性空间稳定模式拍摄的国际空间站Fig.10 International space station photographed by inertial space stabilization mode

图11 惯性空间追踪模式拍摄的某遥感卫星Fig.11 A remote sensing satellite photographed by inertial space tracing mode
4 任务结果分析
相比起常规的对地成像,惯性空间成像任务往往存在背景多变、光照条件复杂、目标较小、背景与目标运动过快等问题,难以对任务成败和质量进行快速分析。对此可采取事后姿轨数据数据分析和相邻帧图像对比两种方式判断任务成败和目标识别提取:
4.1 事后姿轨数据数据分析
在成像任务完成后,随图像数据同时传回的还有成像期间的卫星姿态、轨道等数据,这些数据是最能准确描述卫星执行成像任务期间状态的。另外对于目标,在事后通常也可以得到任务时间点附近的更准确的定轨数据,因此完全可以复现任务过程,以分析任务的执行情况。具体步骤是:
首先,从任务数据中提取任务期间卫星的时间、姿态、位置、速度等信息。另外要得到目标离任务点最近的定轨数据,利用轨道分析工具递推出任务期间目标的位置与速度。之后利用几何换算,计算出目标在每一帧成像期间相对卫星的位置速度。最终结合相机载荷相对于卫星本体的安装矩阵,即可得到成像期间目标在相机视场中的经过轨迹。
如图12为某次任务里,视频卫星双相机视场中目标的移动轨迹,左侧为相机一,右侧为相机二。
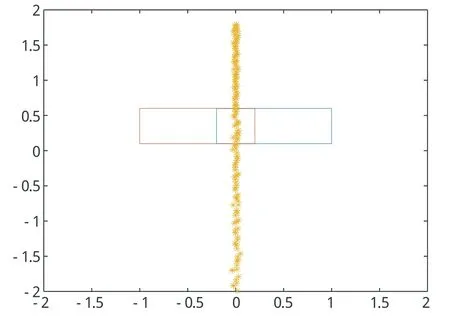
图12 计算分析任务期间目标在卫星视场中的轨迹Fig.12 Computation and analysis of trajectory of target in satellite field of view during mission
由此通过姿轨数据的分析,可以基本确定目标是否被拍摄到,并初步确认拍摄帧数等情况。
4.2 图像判读分析
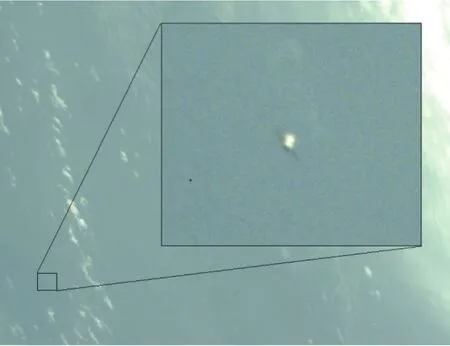
图13 海面背景的“天宫二号”空间站Fig.13 Tiangong-2 space station under sea background
通过姿轨数据的分析,可以基本确定目标是否被拍摄到,但由于惯性空间任务中目标往往并不明显,即便从拍摄角度任务已成功,但识别上仍有难度,如图13。可见图中目标极其微小,且与背景十分类似,依靠单帧图像难以识别。对此类目标,通常采用对比背景移动方向的方式识别——即目标与背景的移动方向、速度通常不会相同,只需通过稳像算法或图形比对,找到与背景运动特征明显不同的点,即可基本确认为目标,如图14、图15。

图14 冰原背景的某卫星图像帧1Fig.14 Image frame 1 of a satellite under ice sheet background
显然,背景是自上而下运动的,而目标点则是向8点钟方向移动,因此可以确定该点不是背景的一部分。再结合姿轨数据的分析结果,若移动方向、速度与分析结果匹配,则可以基本确定目标。

图15 冰原背景的某卫星图像帧2Fig.15 Image frame 2 of a satellite under ice sheet background
对于背景是深空的目标,若成像期间星体姿态相对与惯性空间静止,则背景的恒星点同样应该基本保持不动,或呈现相同的运动轨迹。明显与恒星点运动特征不同的往往就是目标,如图16。

图16 多帧图像叠加后的某卫星惯性空间稳定成像 (含恒星点)Fig.16 Inertial space stabilization image of a satellite(including star points)by multi-frame image superimposition
此图为同一次任务相邻6帧图像直接堆叠,任务期间视频星相对惯性空间静止。可见在这6帧图像中所有恒星点均基本保持不动,仅向2点钟方向有微小位移。而图中目标则向6点钟方向有明显运动,因此可以判断该物体不是恒星点。进一步计算目标在帧之间的移动的像元数,结合帧周期,即可计算目标相对视频星移动的角速度。若与姿轨数据的分析结果吻合,即可以进一步确定拍摄成功。
5 结束语
本文针对利用对地遥感卫星进行空间目标成像实践中遇到的窗口覆盖分析与规划困难、成像模式有限和目标识别障碍,利用“吉林一号”视频系列卫星进行了大量在轨试验,基本实现了窗口搜索与规划程序化、成像模式多样化与目标识别简单化,并分析了该星座对典型低轨目标的覆盖能力。不仅为今后的天基空间目标监测提供了经验参考,更证明了“吉林一号”视频系列卫星具有任务模式多样、卫星性能优良、目标覆盖能力较好的特点,可以为空间目标监测、态势感知和碎片碰撞预警等需求提供有力支持。