基于STEAM理论的中学机器人课程教学研究设计*
2019-09-14丁方仪蔡孟秋陈曙光
丁方仪 蔡孟秋 陈曙光
一、研究背景
STEAM是科学(Science)、技术(Technology)、工程(Engineering)、艺术(Arts)和数学(Mathematics)的英文单词的首字母,是多学科交叉融合的领域。STEAM一词来源于美国,被称为美国的“素质教育”,可以提高学生的总体竞争力,缓解就业压力。STEAM教育理论的发表和研究符合时代的发展,在21世纪被提升为一项针对K12的国家教育战略,其目的在于创新人才的培养。STEAM教育不仅仅是多门学科的叠加,更代表着一种跨学科的整合教育模式。而机器人教育作为跨学科教育的领头羊,正逐渐走进中小学课堂。2017年,由国务院发布的《新一代人工智能发展规划》,更是将中小学人工智能教育的重要性提升到一个新的高度。各级教育相关部门、学校和社会各界学者,也以不同的形式支持并开展有关机器人教育的活动。在机器人的实际教学过程中,教育工作者结合各种内容进行教学,使学生加强机器人技术的学习,促进多学科的知识学习。同时,通过学生自己的动手操作,培养其创新意识和能力[1]。由此可见,机器人教育符合STEAM教育理念,是基于这一理念的教学实践和探索。
1.STEAM理论下的机器人教育
国内对机器人教育缺乏系统性研究,特别是在一线教学过程中,存在许多问题与疑惑。因此,在STEAM教育的视角下看机器人教育问题变得十分有意义。
2.核心特征
STEAM 教育具备的核心特征有:体验性、情境性、跨学科性、趣味性、技术增强性、艺术性、实证性、协作性、设计性等[2],都能体现在机器人教育中。机器人教育是素质教育的载体,涉及领域范围广,涉及科学、技术、工程、数学和艺术等。它打破了各个学科之间的壁垒,强调跨学科内容的整合。机器人课堂以学生的兴趣为基础开展活动,符合学生的认知规律和特点,游戏化的课堂相较于传统课堂更具有趣味性;在搭建机器人的过程中,学生不仅要动手,还要积极开动脑筋思考,使自己沉浸在整个学习过程中。学生在体验课堂的过程中自然而然地了解并接受知识;机器人课程把抽象、枯燥的理论转变为实际操作,使学生在真实情境下进行学习,解决实际问题;学生面对不同的问题进行分工与合作,在团队中互相启发,解决困难;机器人课堂环节包含设计作品,同时强调设计性与艺术性,将学习的结果外化,丰富学生的创造力。
我国《教育信息化“十三五”规划》明确指出:“积极探索信息技术的应用,特别是在跨学科学习(STEAM 教育)教育模式中,要培养学生的创新意识,提升学生的综合素养、促进学生的全面成长。”基于STEAM 教育理念开展中学机器人课程教学研究,能够给教师的教育研究提供一个新的视野,在“教师主导,学生主体”的支持下,充分拓展学生的知识广度,提升学生的综合素质,培养全面发展的人才。
一、基于项目的学习模式
基于项目的学习以学科的概念和原理为中心,其目的是生产成品并将产品推销给客户。它是一种新型的探究学习模型,可以利用各种资源在现实世界中进行实践活动,并及时有效地解决相互关联的一系列问题[3]。
基于项目的学习贯穿于机器人教育的整个过程。该项目由一个促使学生参加活动的实际问题驱动。 学生利用多学科的交叉知识,通过交流讨论和科学探究,利用多种认知工具和信息资源,完成一个或一系列的作品。 在这个项目完成的过程中,创设了一个具体的问题情境,不仅可以满足学生对机器人的学习兴趣,还能建构生成知识,产生记忆和知识迁移。该学习模式侧重于面向学生,强调学生的实践操作,从而提高其动手能力、设计能力、探究能力和团队合作能力,让学生“做中学”“玩中学”“错中学”。
二、基于STEAM 理论的机器人课程教学设计
1.教学目标是培养学生的综合素质
机器人教育的总体目标是培养学生的综合STEAM素养,特别注重提高学生的创新能力,其中包含问题解决、批判性思考以及概念理解能力。以学习者特征分析为依据,结合当前机器人教育重基础轻应用、重模仿轻实验的现实情况[1],剖析“五维一项”的教学目标,具体如下。
(1)知识与技能
在真实的问题情境中,通过对主题的探索,了解和掌握相关的跨学科知识,设计和制作工作模型,提升科学技能与专业素养。在动手实践的过程中,运用生活中所积累的经验解决问题,将自己的设计思路和创造灵感充分融入学生的作品和成果中。
(2)过程与方法
可以使用科学、工程、数学等方法探索实验的主题并完成项目。在合作与交流中发现问题,得出相应的规律和结论,解决问题,学习严谨的思维过程,掌握科学的操作方法和实际操作的基本流程。
(3)情感态度与价值观
体会到将知识学以致用带来的价值,激发学生的想象力和创造力,通过小组研究培养学生的沟通和合作技能。在机器人的创作中,增加艺术感的融入,提升学生的艺术审美。培养学生勇于探索的精神,培养严谨的科学价值观和耐心细致的学习态度。
2.教学内容为“STEAM+R”
我国中小学智能机器人的教学内容在融入STEAM理念后,可以分为两类:一类是机器人学科的相关知识,也是机器人课程的主要内容,包含了机器人基础知识、机器人硬件、机器人编程、机器人的简单应用等4个方面。另一方面是STEAM的相关内容,包含了机器人的社会应用问题。这两部分的内容相互渗透与融合,没有明确的分界线[4]。
具体到某一个机器人课堂(R),需要教学生灵活运用机械、电子、传感器等装置,根据课堂主题项目搭建简易机器人模型,通过图形编程,学生将分为几个合作小组,完成指定的活动任务,进行竞赛,使学生在活跃的课堂氛围中了解科学原理,掌握基本结构,利用网络等资源,完成机器人程序的编写,实现具体的功能,解决实际问题。
3.教学策略必须以学生为主体
基于STEAM理论的机器人教育强调将学生置于实际情境中进行科学探究,培养学生的发散思维和逻辑思维。科学探究型教学的基本导向是科学问题,而机器人可以为科学探究提供技术支持,是科学问题研究数据的来源,是科学探究的工具[4]。基于建构主义理论,在教师或课程理念提出之前,先触发学生的思想,让学生充分交流构思与想法,形成思维碰撞与辩论;相互合作,尊重个人和分工;在时间充裕的情况下引导其反思自己,深入分析,全面思考;当学生提出新观点和新思维时,给予充分的肯定和鼓励,并且教学生将自己的想法进行实现与运用;并用新的经验重新组织学生的学习思路;利用新的思想,结合过去生活中的经验,加入学生的兴趣设计课程。
4.教学评价的多元化
强调使用更开放和个性化的评估形式,将每个学习者视为一个自主的人。 周围环境的变化同时也影响着学生的学习行为,因此在评估的时候不能只根据直观的学习结果,轻易做出判断和定论。在STEAM教育的评估概念中,一定要对学习者的真实学习活动进行描述,并且随时记录下教学活动中的突发情况,以便做出更为准确和全面的评估。要综合考虑学生个人的价值观,以及复杂的环境对个人评估的影响。
整合到STEAM教育理念中的机器人教学评估应注重评估的多样性,并且可以使用多种评估工具。例如量规、研究日记、课堂试卷、课后作业、口头点评等。评价必须形成一个全面而系统的评估体系,贯穿整个教学过程。除了过程性评价和总结性评价,还应关注发展性评价,其中学生的科学精神、创新能力和合作能力应是重点考核指标[5]。
三、以乐高EV3为例的中学机器人教育课程简介
1.机器人硬件简介
本研究使用教学机器人—LEGO Mindstorms EV3(如图1所示),LEGO Mindstorms是可编程主机、电动机、传感器和LEGO Technic零件(齿轮、轴、梁、螺栓)的集合。早在1986年,丹麦乐高公司和美国麻省理工学院(MIT)合作,开展了一项名为“可编程式积木(Programmable Brick)”的研究活动,从此,LEGO Mindstorms EV3应运而生。

图1 LEGO Mindstorms EV3硬件
2.机器人软件简介
LEGO Mindstorms EV3软件是一款专业的乐高 EV3编程软件,该软件的操作界面(如图2所示)为可视化模块,功能十分强大,可以对各种机器人动作进行设计编写。该软件包含的EV3机器人编程工具覆盖面广,内置的程序模块内容丰富,功能强大。总共包括五类编程模块:动作模块、数据流模块、传感器模块、数据运算模块和高级模块。
图2 LEGO Mindstorms EV3软件界面
通过使用乐高智能积木和数字软件,处于中学阶段的学生可以探索科学、编程和工程。该课程有助于培养审辩式思维技能,提高创造力,以及探索现实生活中的 STEAM 主题。
3.机器人课程内容
LEGO Mindstorms EV3机器人致力于机器人课程的研发,为教师带去丰富的教学支持。乐高机器人解决了大部分人不懂电子电路、数字逻辑、机械力学等专业知识也能学习机器人制作的难题,简单易上手,特别适合中小学生接触学习。采用乐高机器人教育方案,学生用户可以直接跳过大量繁杂的专业知识,只要自己有清晰的逻辑脉络,就不愁搭建不出自己的机器人[6]。
四、基于STEAM理 论的EV3机器人教学活动设计案例
机器人课程教学并不是单纯讲授编程方法,而是将STEAM教育中的相关科目进行有机整合,与实际生活相联系,引导学生自主地开展跨学科探究活动。本课程按照学习内容及难度分为基础I、基础II、进阶三个部分,每部分各18次课,每次课1小时30分钟(2课时),共36课时。教学的基本内容侧重于机器人的相关知识和基本原理,在这一基础上,允许学生通过模拟某些现实生活场景体验机器人在现实生活中的重要作用。整体课程从现实出发,引导学生通过设计机器人并完成相关的竞赛任务解决问题。
下面以基础II中的一项任务“机器人餐厅I”(第 11次课)为教学案例加以说明,具体课程内容及课时分配见表1。“机器人餐厅I”项目为EV3基础II模块的内容,共2课时。

表1 EV3基础II课程教学大纲(案例部分)

表1 (续)
本项任务主要引导学生发挥想象力,使用EV3套件对机器人送餐车进行改造,使之更加美观。通过程序设计与操作实践,根据自行设定的应用情境,让机器人送餐车完成巡线送餐任务,让学生体验将知识运用于生活的乐趣。
课程主题:机器人餐厅I
课程课时:2课时
教学目标:
知识与技能:认识颜色传感器,会正确使用颜色传感器测量光电值;综合运用分支结构、循环结构等嵌套程序实现巡线车功能。综合运用跨学科知识,融入学生的项目设计中。
过程与方法:通过分析机器人送餐的目标需求,设计一套送餐问题的解决方案,采用项目式学习法,通过小组分工合作的形式,共同参与项目的各个环节。交流构思及想法,在机器人程序的编写及调试过程中逐渐实现。
情感态度与价值观:培养学生的科学意识、分析问题的全面性、自主学习能力;养成良好的探究思维、求真务实的态度、科学操作的习惯;提高综合应用能力、动手能力、创新能力;更好地用自己的能力服务他人,为社会带来效益。
教学重点:颜色传感器的综合应用。
教学难点:使用单光电巡线指挥机器人行动。
任务设计:完成基础小车单光电巡线项目。
教学准备:学生考勤表、各组任务完成记录表、机器人餐厅送餐路线(用黑色胶带)、EV3机器人套件(含颜色传感器)。
教学流程设计:
【导入】
教师有个好朋友是位厨师,最近他开了一家餐厅,虽然餐厅很小,只有两张桌子(如图3所示),但是因为厨师的厨艺很棒,所以每次都坐满了顾客。厨师一个人忙不过来,能不能帮他想个办法呢?
现在很多餐厅里都使用机器人当服务员,为顾客提供点单和上菜等服务,今天一起给厨师的餐厅做一个机器人服务生吧。

图3 机器人送餐路线
【建构】
任务分析:怎样实现机器人的自由行进?—设计带有轮子的车型机器人。
怎样让车子走规定的路线?—利用EV3主机中的PortView程序块测量车轮的旋转度数。
有没有比测量度数更便捷、更智能的方法?—使用传感器进行测量。
步骤1:认识颜色传感器
现实生活中,蚂蚁会沿着地上放有糖的线路行走;警犬和搜救犬会追寻气味搜寻目标;地铁和火车沿着既定的轨道行驶。而机器人汽车的基本功能,就是根据自身需要,通过自动分析及数据处理,沿着指定的路线前进。
今天将要设计一个装有颜色传感器(如图4所示)的机器人,将颜色传感器设定为反射光强度模式,就可以实现沿着黑线行驶。

图4 颜色传感器
颜色传感器有几种使用模式?—3种模式:颜色模式、反射光线强度模式、环境光强度模式。
颜色传感器可以测量感应几种不同的颜色?—7种颜色:黑、蓝、绿、黄、红、白、棕。此外还有一种无颜色感应。
步骤2:搭建模型
分组设计并搭建车型服务机器人(如图5所示)在餐厅工作,要注意车轮的安装距离,保持车身行进过程中的平衡性。

图5 车型服务机器人模型
注意思考颜色传感器的安装方向和它与地面的距离,多远的距离才是检测颜色的最佳距离?—3厘米左右(如图6所示)。

图6 颜色传感器的安装
步骤3:单光电巡线原理
根据巡线示意图(如图7所示),可以分析出机器人沿线走时做了两个动作:“看到”黑线转向白色区域和“看到”白色区域转向黑线。可以用新的模块完成巡线任务。

图7 巡线示意图
步骤4:运用流程控制模块中的“切换”模块,可以实现程序在多种情况中的选择。切换模块涵盖了多种程序的序列,不同的序列代表了不同的情况(如图8所示),由机器自动选择。

图8 序列切换情况
步骤5:如何使机器人准确判断黑线和白色地面?方法:测量地面的反射光强度。
将颜色传感器连接主机的端口,进入程序块Port-View菜单(如图9所示)中,找到颜色传感器所连接的端口,程序块屏幕会显示当前颜色传感器反射光模式的数值。

图9 EV3主机Port View菜单
步骤6:测量
测量黑线反射光强度、白色场地反射光强度,并记录下来。
步骤7:编程
在切换模块中选择颜色传感器→比较→反射光强度(如图10所示)。

图10 切换模块
判断条件的阈值,应该如何填写呢?
一般情况下为测量出的黑色反射光值和白色反射光值的平均值(如图11所示)。

图11 阈值设定
根据巡线小车的两种不同状态:感测到黑线,往白色区域偏转;感测到白色,往黑线偏转;“服务员”程序应该如何编辑,有几种方式?
方法1:如颜色传感器检测到反射光值>50的区域,往右无限制转弯;如颜色传感器检测到反射光值<50的区域,往左无限制转弯(如图12所示)。

图12 不使用切换模块
方法2:如果颜色传感器检测到反射光值<50则无限制右转,否则无限制左转(如图13所示)。
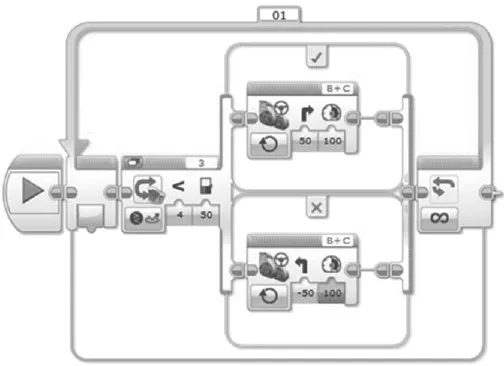
图13 使用切换模块
思考:为防止菜品洒落,程序可以怎样调整?——降低转向值和功率。
注意:颜色传感器摆放的初始位置(位于黑线的某一侧),要跟自己的程序对应起来。
【延续】
步骤1:上台展示并总结
单光电的特点:能完成基础巡线,但是速度慢,摆动幅度较大。
步骤2:师生评价和小组互评
步骤3:拓展任务
成功走完直线,尝试走一走曲线吧!需要注意什么呢?
五、结语
科技推动教育,知识改变命运。随着智能教育机器人的不断更新换代,中小学生有了更多机会接触和学习机器人的相关技术和知识。在中小学的信息技术课堂以及社团活动中,越来越多地出现了机器人和编程的身影。本研究中所提及的丹麦乐高机器人(LEGO Mindstorms EV3),既是针对中小学生开发的学习型教育机器人代表,也是机器人行业与产品中的领头羊。针对这一产品所开发的校本课程,对于国内的中小学智能机器人教育的持续发展具有重大意义[7]。该课程的教学内容涉猎广泛,综合了多学科知识,趣味性高,实践性强。同时,课程结合了最新、最前沿的科学成果,将STEAM教育中提倡的素质教育也涵盖其中,值得大范围应用与推广。