基于背景感知相关滤波的无人机目标跟踪算法
2019-09-12苏婷婷郝禹哲顾佳欣
苏婷婷 郝禹哲 顾佳欣

摘 要:四旋翼无人机可广泛适用于各种地形中,完成目标物的实时捕捉、动态跟踪等任务,商用前景非常可观。本文针对无人机目标跟踪问题,设计了一种基于背景感知相关滤波的目标跟踪系统。背景感知相关滤波算法与现有文献中的目标跟踪算法相比,其优势在于提取深度特征与空间约束相结合,目标跟踪拥有更高的实时性与准确性。实验结果表明,本文设计的无人机目标跟踪算法能够有效地识别与跟踪预设目标,本系统具有一定的应用价值。
关键词:四旋翼无人机;目标跟踪;相关滤波;背景感知相关滤波
文章编号:2095-2163(2019)04-0192-03 中图分类号:TN2 文献标志码:A
0 引 言
相较于大型飞行器,四旋翼无人机可应用于众多复杂地形中实现垂直起落、悬停等任务,是完成目标实时捕捉动态跟踪的硬件支撑平台。
在无人机目标跟踪领域,一些有效的目标跟踪算法相继被提出。均值漂移(Mean shift)算法[1],通过对特征样本点的分析,对图像进行平滑和分割处理,反复迭代找到与目标最接近的位置,但此算法不适用于在复杂环境中变化的运动物体,目标大小形状改变也会对跟踪结果造成很大影响。基于卡尔曼滤波的目标跟踪算法[2],是通过线性系统的优化最小方差预测目标物体的运动状态,但此算法精度仍需改良。基于粒子滤波的目标跟踪算法[3],通过大量粒子的采样与重新扩散,近似得到运动目标的状态,但此算法计算量大,不适用于实际环境中的目标跟踪。在实际应用中,通常使用多种算法相结合以提高目标跟踪的实时性与准确性。
在前人的基础上,本文设计了一种基于背景感知相关滤波(Background-aware correlation filters,BACF)算法[4]的无人机目标跟踪系统。该系统可对于处在复杂背景下运动目标的HOG特征(方向梯度直方图)进行检测与提取,利用改进的相关滤波算法实现在一定区域内自动识别指定目标,一旦识别到指定目标,无人机将会自动锁定该目标,对其进行自主跟踪。
1 基于背景感知相关滤波的无人机目标跟踪
1.1 背景感知相关滤波算法
在目标跟踪过程中,目标通常不是静止的,其运动轨迹的不规则性加大了实时目标检测跟踪的难度。本文在对移动目标进行识别时,采用传统的相关滤波算法,通过加空间约束的方式去除训练相关滤波所存在的边界效应,并基于HOG特征提取,实现在复杂背景下对目标物体的实时跟踪。
传统的相关滤波算法[5]通过已经跟踪的若干帧中目标的位置,提取出对目标有较好鉴别力的特征,训练出一个滤波器模板,对于新帧中可能出现的目标区域,提取出该区域特征,与滤波器模板作相关处理。根据相关值得到在新帧中目标的预测位置,并以该位置为中心提取出特征,反过来进一步训练滤波器模型,并反复上述步骤进行后续的目标跟踪训练。
由于传统的相关滤波算法是基于模板的相关性匹配方法,目标背景并不是随时间改变的,对于快速运动目标的实时检测的效果并不能取得满意的性能,且目标检测的实时性不高。为了解决上述问题,确保算法能够在实际环境中对目标物体较好地识别与实时检测,本文将HOG特征提取与空间约束算法进行有机结合。通过有效地模拟目标物体的背景随时间变化的模板,利用空间约束的相关滤波算法解决边界效应,提取多通道HOG特征进行目标检测与跟踪。
在滤波器求解过程中,利用相互独立的多特征通道,去除训练相关滤波存在的边界效应,再通过ADMM(交替方向乘子法),把一个大优化问题分成可分布式同时求解的多个子问题,通过对子问题的迭代可以快速得到滤波器的近似最优解,最终实现对于目标物体的实时检测跟踪。
1.2 无人机目标跟踪设计
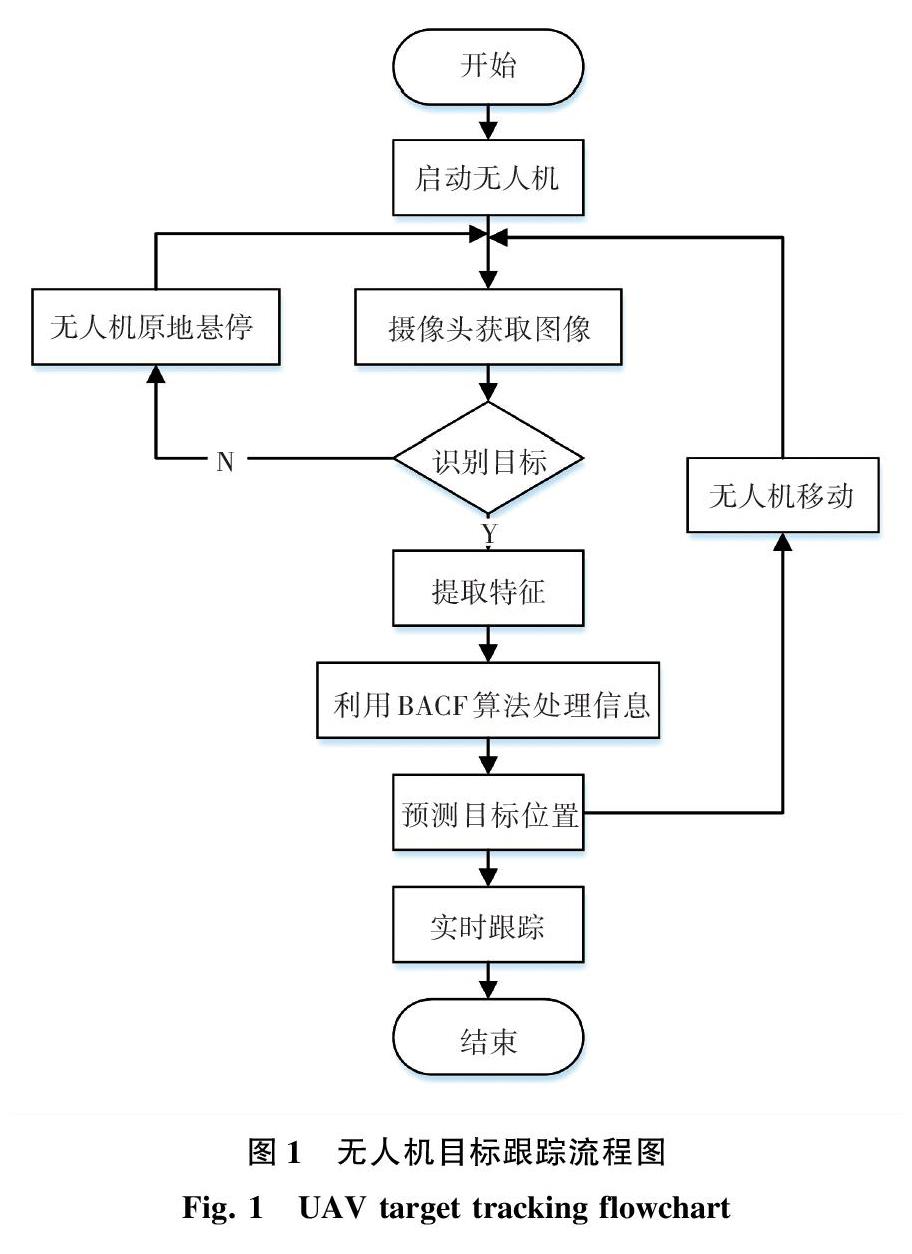
目标跟踪流程如图1所示。本文所设计的无人机目标跟踪系统在进行实时跟踪的主要流程如下:首先启动无人机,通过无人机所搭载的摄像头获取图像,当无人機未捕捉到预设目标物体时,将维持原地悬停状态,并返回重新捕捉目标物体。当发现目标物体,无人机将信息传递给地面站,通过提取目标物体的特征,利用BACF算法处理信息,得到预测目标物体位置,无人机移动,重新获取图像,如此反复,最终实现对目标物体的实时检测与跟踪。
2 实验结果与分析
为了评估本文提出的基于背景感知相关滤波的无人机目标跟踪算法的有效性,搭建了一个四旋翼无人机硬件仿真平台,选用红色遥控小车作为目标物体,根据上述的背景感知相关滤波算法,利用Keil软件环境进行编程仿真。系统仿真结果如图2所示。当遥控小车按照一定轨迹运动时,无人机能够较好地识别与跟踪小车,且系统的实时性也较好,能够满足一些场景应用。但仿真过程中发现,当小车受到遮挡或者光照较暗时,本文提出的算法的性能仍然需要进一步改善。
3 结束语
本文设计了一种基于背景感知相关滤波算法的无人机目标跟踪系统,该系统可对于处在复杂背景下的运动目标的HOG特征(方向梯度直方图)进行检测与提取。利用改进的相关滤波算法实现在一定区域内自动识别指定目标,进而进行目标跟踪。本文算法对于无遮挡目标和正常光线下的目标能够较好地识别与跟踪,且具有一定实时性。未来人们将对目标被遮挡和光线较暗环境下的无人机目标跟踪问题进行深入研究。
参考文献
[1]田莘. 基于MeanShift算法的目标跟踪问题研究[D]. 西安:西安科技大学,2010.
[2]RIDDER C, MUNKELT O, KIRCHNER H. Adaptive background estimation and foreground detection using Kalman-filtering[C]//Proceedings of International Conference on Recent Advances in Mechatronics. Istanbul, Turkey:ICAM, 1995, 193-199.
[3]王法胜,鲁明羽,赵清杰,等. 粒子滤波算法[J]. 计算机学报,2014,37(8):1679-1694.
[4]GALOOGAHI H K, FAGG A, LUCEY S. Learning background-aware correlation filters for visual tracking[C]//IEEE International Conference on Computer Vision. Venice, Italy:IEEE, 2017:1144-1152.
[5]张红颖,胡文博. 多特征融合的尺度自适应相关滤波跟踪算法[J]. 系统工程与电子技术, 2019,41(5):951-957.
