嵌入式力量器械辅助控制系统的设计与研究
2019-09-12孙祥瑞娄莉
孙祥瑞 娄莉

摘 要:随着健身人群的增加,安全事故频频发生。本文为了改善这一现状,基于ARM Cortex-M4内核的STM32F407开发板,针对传统力量健身器械设计了力量辅助控制系统,以提升当下力量健身训练的训练效果,减少健身者在身边无人时存在的安全隐患。该系统主要由2部分组成:第一部分是由编码器来对器械运动状态进行识别与检测;第二部分是伺服电机驱动器的设计与实现。本嵌入式力量辅助系统实现了传统力量健身器械的功能提升,在训练者使用本器械时,能够提供实时的运动状态和进度反馈,若检测到训练者失力或力竭,则电机工作产生辅助力量帮助训练者完成训练,提升了训练的高效性和安全性。
关键词:嵌入式技术;伺服电机;驱动器;STM32文章编号:2095-2163(2019)04-0198-04 中圖分类号:TP273 文献标志码:A
0 引 言
目前,国内健身房中力量型健身器材普遍存在安全性不高、初学者用户体验差、智能化缺乏等问题[1]。本文将先进的伺服电机控制技术应用在力量健身器械中[2],降低了初学者在使用力量器械时受伤的概率,提高史密斯架的安全性,提升训练者使用史密斯架的训练效果,改变传统的无交互式训练[3-5]。引领健身器材向更智能化的方向发展是目前健身器材行业需要解决的一个重要技术问题。
本文设计的力量辅助控制系统,在训练者使用力量健身器械时,可将自己的相关训练意图输入到系统中,系统会给出相应的推荐训练方案,为用户提供合适的帮助力量,使其安全、高效地完成每组动作。
1 嵌入式力量辅助控制系统硬件
1.1 系统硬件构成
整个力量控制辅助系统采用正点原子的STM32F407为核心控制器, μC/OS II为操作系统的控制方案。这套控制系统硬件主要包括以下几个部分:开发板、伺服电机、伺服驱动器、编码器等。工作时,交流电提供给电机驱动模块,电机驱动模块控制伺服电机进行工作,伺服电机在工作的同时,其编码器将电流、速度、位置所检测到的信息发送到开发板中,开发板通过信号处理将功率进行变换使其发送给电机驱动模块,电机驱动器模块根据开发板发来的功率大小控制伺服电机,整个系统为实时闭环系统。
系统的中心控制包括了CPU核心、晶振、复位电路等功能模块。CPU模块负责处理编码器传送回的数据,再根据程序发出相应的指令。晶振电路则负责给系统提供时钟信号。用于异常模式回复的复位电路和负责系统监控工作的看门狗系统。这些系统的组合就是该控制系统的中心控制模块。系统框图如图1所示。
中心控制模块用于处理各个引脚所接收到的数据,经过开发板中的程序处理后发出执行各个功能的信号。信号的输入和输出部分包括杠杆运动状态分析模块和电机扭矩控制模块。其中杠杆运动状态分析模块是通过编码器检测到杠杆的运行方向、速度以及位置后,并把这些数据进行模拟信号到数字信号的转化,然后发送给CPU进行分析。电机扭矩控制模块则是将CPU分析出来的杠杆运行状态按照程序设计的比例将控制信号传送回私服电机控制端,进而控制电机的扭矩大小,给用户一个合适的辅助力量。
1.2 位置、速度传感器的选择
在本系统中,杠杆运动的位置和速度是分析杠杆运动状态的2个重要参数,因此有必要选择一款稳定性优良、精度高的位置、速度传感器,而且该系统可能未来会使用在各种类型的力量器械上,要考虑到器械操作杆的运动行程长短不一,因此需要较强的适应性。综合多方面考虑,选择2 500 p/r(pulse per circule)(分辨率10 000)的三通道增量式编码器。由于其是与传动轴直接进行连接,所以该传感器不仅可以满足操作杆的位置、速度的获取,并且采样速度快、精度高、误差小,可以分辨0.036°的角度差。
1.3 增量型编码器的相关设计
该三通道增量式编码器有3个通道:A、B、Z。A、B相是编码器内部的两对光电耦合器,其输出的两组脉冲序列相位相差90°。而正转和反转时两路脉冲的超前、滞后关系刚好相反[6-7]。如图2所示,正转时,B相的脉冲在上升沿时,A相脉冲为高电平;反之,当反转时,则A相脉冲为低电平。A、B相用来采集脉冲个数(旋转角度),并且判断电机运行的正反方向。而第三个通道Z有一个透光段,每转动一圈,输出一个脉冲,该脉冲成为Z相零位脉冲,用作系统清零信号,坐标的原点,以减少测量的累积误差。
1.4 伺服电机、驱动器的选择与功能设计
驱动器选择力川LCDA4-075B2,电机使用750 W的力川07L02-90M02430[8]。
电机接线设计如图3所示。
由于电机的力矩需要随着情况实时的改变,而速度和位置是不固定的,主要由用户的运动状态来决定,因此在驱动器的硬件设计部分主要采用转矩模式的设计方式,先将伺服驱动器的CN3上的44针中需要用到的各个相关参数进行初始化,然后,通过上位机发出的模拟信号来对电机进行实时的控制。伺服驱动器的工作模式为转矩控制,其接线如图4所示,转矩模式的功能配置见表1。
2 嵌入式力量辅助控制系统软件
2.1 软件体系结构
本系统采用面向对象的思想来设计规划软件体系结构,将开发板对应的各个硬件体系用互不干扰的程序模块进行设计,这样设计提高了系统的鲁棒性,各模块之间通过单独的编写和封装,每个模块之间通过约定好的输入输出方式来进行通信。各子模块通过芯片中烧写的程序来进行相互调用。采用面向对象的方法可以让后期更新的复杂度降低,添加新模块而不会影响到其它已有的模块。嵌入式微处理器软件体系结构如图5所示。
2.2 软件模块的设计与实现
2.2.1 软件流程设计
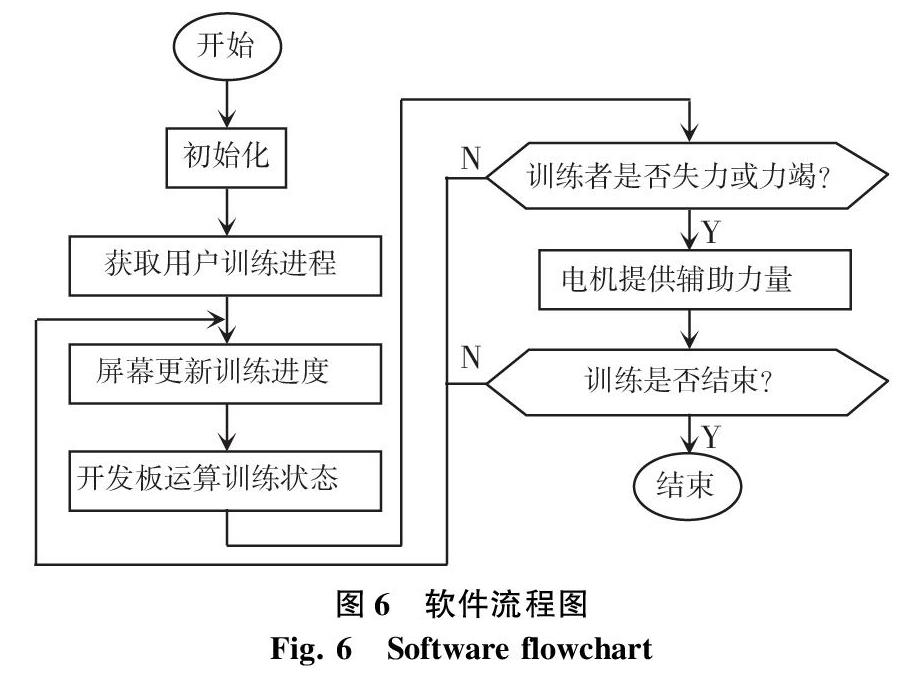
当用户开始训练时,系统将根据用户的个人信息进行系统初始化,并由用户触发开始训练。在训练过程中,开发板实时监测用户的训练情况,将训练组、次数、训练时间、当前状态等信息反馈在屏幕中。当传感器检测到用户力竭时,电机介入工作,帮助用户完成当下动作。用户结束训练后,系统待机工作流程如图6所示。
2.2.2 交互界面
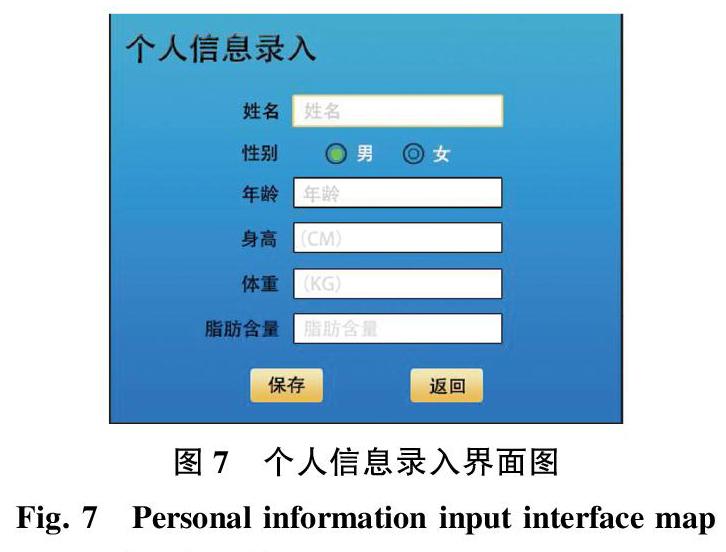
嵌入式系统的图形用户界面,需要可靠性强、移植性高、占用资源尽可能少、方便配置等特点,最终选择EMWIN为本系统的图形设计软件。EMWIN可应用于多任务环境中,同时使用实时操作系统与EMWIN。本文使用ARM Cortex-M4内核的STM32平台,通过基于STM32平台μC/OS-II上EMWIN的移植,在此基础上开发了基于EMWIN的图形用户界面,针对不同的训练者,给出相应的训练计划,交互界面如图7所示。
2.2.3 进程实时監控
传统无交互式的健身模式下,用户往往需要自己记录锻炼进度(组、次数)。为了改变这一现状,本文添加了对用户运动状态的采集,实时地将训练者当前运动状态展现在屏幕上,这样使训练者注意力更加集中在当下的训练上,不会分心去计算记录当前的进度位置。
要实现这一功能,首先要对用户的运动轨迹进行监控,每检测到杆子完成一次完整的行程,当前组数的次数增加1,当检测到杆子在起始位置停止运动后5 s,则当前组数结束。在每组结束后紧跟着一个定时器,来记录休息时长,组数增加1。将其录入在开发版当中的数据通过UART串口发送到显示屏上,用户可以通过显示屏来获取到自己的实时运动数据,进而达到提高健身专注度和效率的作用。训练进度实时状态显示如图8所示。
2.2.4 力量辅助
在检测到用户处于力竭状态时,电机需要产生合适的力量去帮助训练者完成当前动作,而训练者需要的力量大小是实时变化的。辅助力量的大小主要取决于用户当前速度和应有速度的差值,本系统则采用力矩线性增长的方式来对训练者的力量需求和电机实际发力大小作平衡匹配。当用户速度开始低于正常速度,则电机工作,产生0.05N的力并持续增长,直到用户的锻炼速度恢复到了正常值。
3 结束语
本文利用ARM Cortex-M4内核的STM32F407开发板,通过嵌入式工控技术设计了力量辅助控制系统。该系统实现了力量器械对运行状态的识别,判断健身者训练过程中的力量变化,在需要帮助时提供合适的力量辅助,并且实时显示当前健身进度,减少健身时安全隐患,给健身者带来了更高效、更安全的健身体验。
参考文献
[1] 刘洋. 智能化健身器械的研究与应用设计[D]. 合肥:中国科学技术大学, 2015.
[2]魏松. 基于交流伺服的健身器材负载控制系统研究[D]. 济南:山东建筑大学, 2015.
[3]YANG Wenlei, JANG Tingbiao. Hardware design of digital AC servo system based on DSP2812[C]//2010 International Conference on Intelligent Computing and Integrated Systems. Guilin, China:IEEE, 2010:337-340.
[4]纪科辉. 低速交流电机伺服系统的研究与实现[D]. 杭州:浙江大学, 2013.
[5]LIM J E, CHOI O, NA H S, et al. Design of intelligent fitness guide system in context aware exercise environment[D]//Future Generation Communication and Networking (FGCN 2007).Jeju, South Korea:IEEE,2007:1-4.
[6]REZAEE A. Determining PID controller coefficients for the moving motor of a welder robot using fuzzy logic[J]. Automatic Control and Computer Sciences,2017,51(2):124-132 .
[7]荆建立, 王艳春, 朱永庆. 无刷直流电机模糊参数自适应PID控制[J]. 控制工程, 2018, 25(5):915-919.
[8]覃海涛. 交流伺服系统自调整技术研究[D]. 武汉:华中科技大学博士学位论文,2011.
