基于MATLAB的ABB IRB1600 机器人运动学仿真
2019-09-12王沐雨吴国新
王沐雨,黄 民,吴国新
(北京信息科技大学,北京 100192)
0 引言
随着工业技术的发展,单纯的手工劳动早已不能满足现代社会的基本需求,工业机器人应运而生,大大提高了生产效率,是智能化社会发展的重要一步。瑞典的ABB 公司有巨大的影响力,是目前世界上工业机器人四大巨头之一。
在工业机器人依旧昂贵的市场背景下,盲目安装可能会导致人力物力的浪费。随着计算机智能设备的发展,计算机虚拟仿真模拟技术也愈渐成熟。研究人员通过在计算机上建立工业机器人的仿真模型,使其具有与真实机器人类似的物理功能。例如MATLAB中的Robotics Toolbox(机器人工具箱),它包括了种类众多的功能函数,可以对工业机器人进行运动学仿真,这大大减少了资源浪费。
1 ABB IRB1600 机器人基本结构
ABB IRB1600 是ABB 公司旗下的一款六自由度的串联型机器人,它具有广泛的应用,在码垛、测量等领域都有优越的表现(图1、表1)。

图1 ABB IRB1600 机器人实物

表1 ABB IRB1600 机器人工作参数
2 使用改进D—H 方法的MATLAB 建模
图2 所示为在ABB 公司旗下的软件RobotStudio 中仿真的ABB IRB1600 机器人。
可以由机器人的改进的D—H 参数,利用机器人工具箱的Link 函数实现串联机器人的建模。改进的D—H 参数来源于D—H 方法,D—H 方法是由Denavit 和Hartenberg[2]提出,本质为关节链中的每一个杆件都构建坐标系的矩阵方法,其采用4*4的其次坐标变换矩阵来描述机器人相邻两杆i 和i-1 的空间几何关系,D—H 参数建模是常见的建模方式。本文采用改进的D—H 方法,与D—H 方法不同的是它是在远离底座的结构处建立坐标系。ABB IRB1660 机器人的改进的D—H 参数见表2。
其中,θi为连杆转角,即为两条公垂线ai-1和ai间的夹角;di为连杆距离,即为两条公垂线ai-1和ai间的距离;为连杆长度,即为i-1 与i 两关节轴线间的公垂线长度;∂i-1为连杆扭角,即为i-1 与i 两关节轴线间的公垂线长度。
连杆坐标系的建立标准如下:Zi-1轴沿关节i-1 的轴线方向,Xi-1沿公垂线ai-1且指向Zi轴方向,Yi-1满足右手定则。
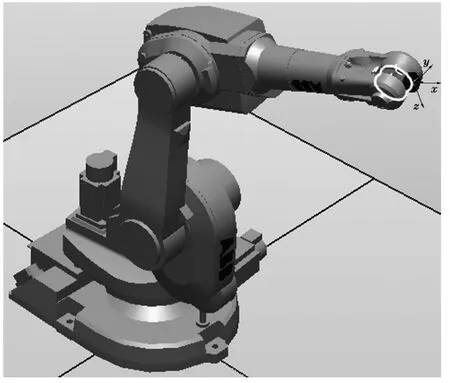
图2 RobotStudio ABB IRB1600 机器人仿真图

表2 ABB IRB1600 机器人改进的D—H 参数
通过表2,可以在MATLAB 中利用Link 函数对IRB1660 机器人进行建模,代码为:

可观察其如下位姿(图3):


图3 MATLAB 中某位姿结果
3 机器人正、逆运动学仿真
3.1 正运动学仿真
假设6 个关节转角分别为(pi/6 pi/5 pi/4 pi/3 pi/3 pi),使用功能函数Fkine 编程如下:
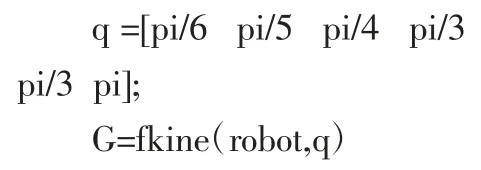
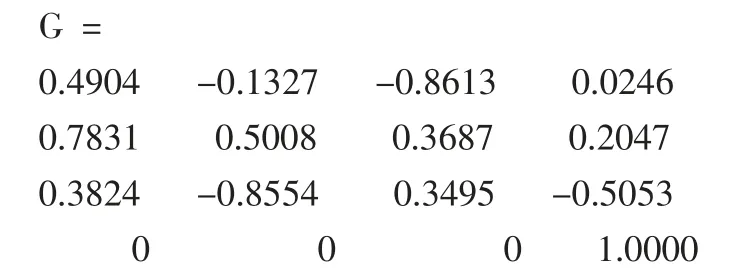
G 即为机器人在关节转角为q 时的末端位姿,计算结果如下:
3.2 逆运动学仿真
假设已知ABB IRB1600 机器人末端执行器的空间位姿为G,反求各个关节的转动角度,使用功能函数ikin[1]编程如下:
N=ikine(robot,G)
N 即为机器人达到位姿G 时的一个转角结果,计算结果如下:

将此结果N 与正运动学时输入的转角q 一起仿真出来,可以发现他们两个是完全相同的位姿,由此可知机器人建模正确并且正、逆运动学分析正确(图4)。
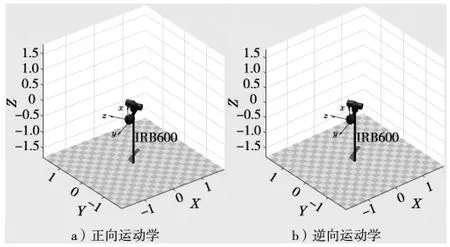
图4 正向和逆向运动学转角仿真比较

4 机器人轨迹规划及其仿真
轨迹规划方法是对机器人在运动状态下的位移、角速度及角加速度进行规划,得到其运动曲线并观察其具体运动状态。本文选用的是关节空间轨迹规划法,在空间中选取任意两点,调用MATLAB 的机器人工具箱中的jtraj 函数进行机器人的关节空间轨迹规划。设关节空间中任意两点间对应的的关节转角为theta1=[0 0 0 0 0 0](即θ1)、theta2=[pi/2 0-pi/2 0 0 0](即θ2),运动采样时间间隔为0.1 s,仿真时间为5 s,并用密集的黑色的‘o’型表现出来(图5)。代码如下:

图5 机器人运动轨迹

同时需要研究6 个关节的角位移、角速度和角加速度。为了更明显地观察每个关节的运动曲线,选择theta1=[0 0 0 0 0 0]、theta2=[pi/6 pi/5 pi/4 pi/3 pi/2 pi],绘制6 个关节角位移曲线代码如下:
得其各个关节角位移仿真曲线,如图6 所示。

图6 各关节角位移仿真曲线
同理可得其关节角速度和关节角加速度仿真曲线,如图7和图8 所示。
由以上3 张图可知,机器人各关节角位移、角速度和角加速度曲线连续、平稳,无拐点、间断、跳跃等现象。

图7 各关节角速度仿真曲线

图8 各关节角加速度仿真曲线
5 结束语
随着社会的智能化发展,工业机器人的广泛运用,对其进行运动学仿真可以加强我们的的理解,避免不必要的人力物力的损失。通过本文的叙述,可完成对六自由度串联机器人的MATLAB 仿真,并由其位移、角速度、角加速度的曲线观察其运动状态。
