漂浮式海上风电发展现状及趋势
2019-09-10包彩虹吴鹏冠
包彩虹 吴鹏冠
摘要:随着风机单机容量的逐步增大,浅海面积的进一步受限,深水风电的发展已然成为开发可再生能源的必然趋势,而在深水风电的研究中最重要的就是漂浮式基础概念的提出。本文主要从风电机组的基础型式来对其技术发展进行阐述分析,重点论述了TLP(张力腿式平台)的发展现状,并例举阐述了国外典型TLP平台的海上漂浮式风电项目,从而为我国大力发展漂浮式海上风电提供良好的借鉴作用。
关键词:漂浮式风机;TLP平台;锚泊系统
Current status and trend of the offshore floating wind power——Take TLP For Example
Abstract: With the enlargement of unit capacity of the wind turbine and the limited of the shallow sea area, the development of deepwater wind power has become an inevitable trend in the exploitation of renewable energy. Furthermore, the most important study of deepwater wind power is the proposal of the floating conception. In this paper, we mainly discussed the foundations of the floating wind turbine, and the current status of tension leg platform(TLP) is a focal point of a full paper. Also we illuminate the foreign offshore floating wind power projects with many typical TLP examples. Consequently, its technology can provide a good reference for the development of floating wind turbine in china.
Keywords:Offshore floating wind power; TLP foundation; Mooring and anchoring systems
0 引言
在石油资源形势日益严峻、全球气候逐渐变暖的情况下,海上风能作为一种新的可再生能源,由于其资源丰富受到了大多数国家的青睐。国家能源局已于《风电发展“十三五”規划》中明确指出:到2020年底,风电累计并网装机容量确保达到2.1亿千瓦以上,其中海上风电并网装机容量达到500万千瓦以上。由此可见,海上风电是风电产业未来发展的方向,也是我国能源结构转型的重要支撑。
海上风电根据海水深度可分为近海风电(水深<50m)和深海风电(水深>50m)两种型式。随着近海风资源的开发利用趋于饱和,以及风电机组单机容量的逐渐增大,海上固定式基础所面临的设计和施工挑战越来越大,而漂浮式风机本身为顺应系统,在环境条件作用下依靠系泊系统实现定位,对环境适应性更强,且视觉污染和噪音污染与近海风电相比较小,因此漂浮式海上风电技术的发展将在海上风电的跨越式发展中发挥重要的作用。欧洲、美国、日本等国家在海上风电事业的发展中一直处于领先地位,对于漂浮式基础的研究也较为成熟,因此,研究国外漂浮式海上风电技术可为我国向深远海风电场发展提供可能。
1 漂浮式风电机组基础型式
欧洲研究报告指出,风机基础的投入可占总投入的20%,并随着海水深度的增加而增加,因此漂浮式风电技术的改革创新必然需要大力发展经济可行的基础型式。
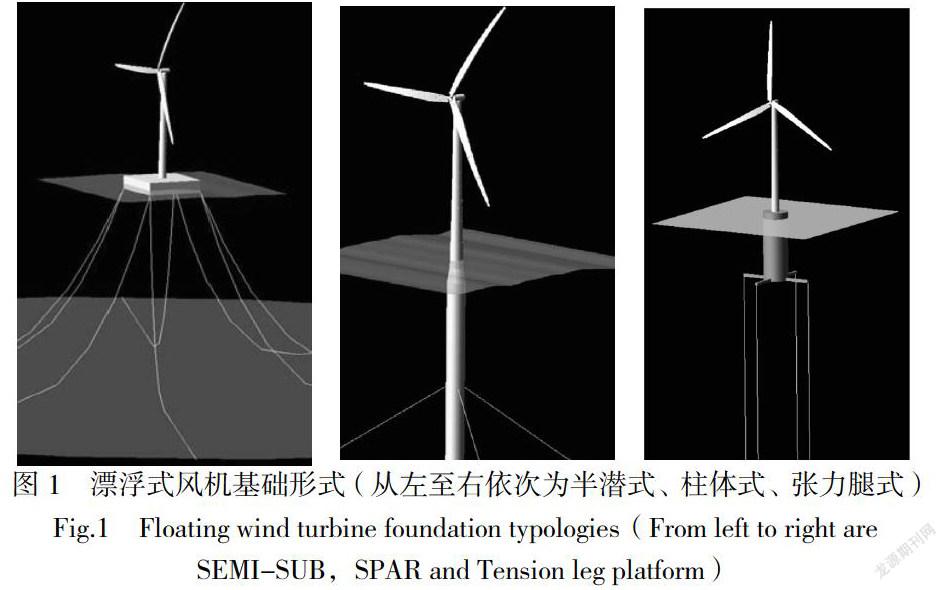
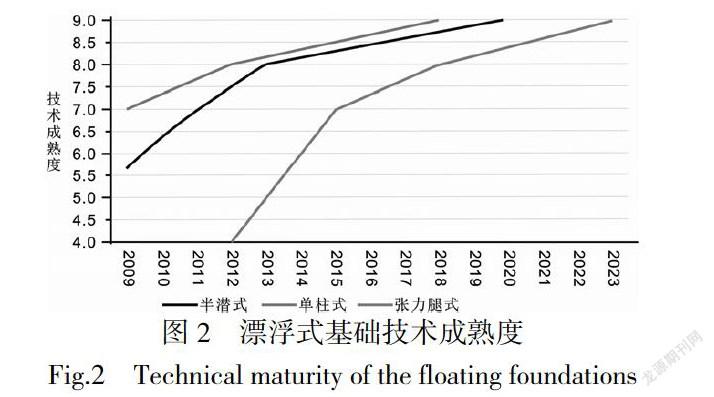
早期的海上风电基础主要有单桩式、三脚架式和导管架式[1],而近几年为适应不同海床条件、水深情况以及机组和环境因素,海上风电基础结构开始越发多样化。随着离岸距离和水深的拓展、以及系泊系统的研究,漂浮式基础将会得到更广泛的应用。漂浮式基础结构主要由锚固系统、锚锭地点和压载舱组成,现在市场上主流的漂浮式基础为半潜式、柱体式、张力腿式这三种型式(图2),其中,根据锚链的受力状态,又可将前两类归为悬链式基础,最后一类为张紧式基础。欧盟对新技术应用进行了成熟度等级划分,其指标由低到高可分为9级,以此表示新技术的研发程度,当技术成熟度达到8级及以上时,便可认为该技术基本具备投入商业运行的条件,目前这三种漂浮式基础的技术成熟度现状如图2所示。
1.1 TLP基础
1.1.1 概念
张力腿式概念主要是通过张紧的系泊缆绳固定于海底来提供稳定性。该结构较轻,具有独特的筋腱系统,同时张力腿式概念吃水深度较浅,当存在起伏、倾斜以及翻滚运动时,具有较高的稳定性[2][3]。
Crozier等人对两种不同类型的TLP风机概念做了大量的数字化对比,她发现被拖曳至目的地的TLP风机比搬运至目的地的具备更为有利的动态性能[4];Jagdale等人使用时间域来分析四浮筒TLP设计,他们主要通过改变塔长、浮筒长、横截面以及系泊缆绳的数量来评估平台的动态响应[5];Tracy等人使用频率域法分析了TLP的最佳参数[6];Nihei等人则提出了一种由3钢丝和6筋腱组成的轻结构,他们通过一系列实验发现筋腱会随着漂流机制的改变而松弛随之结构遭到破坏[7][8]。
1.1.2 锚泊系统研究
锚泊系统的研究包括系泊和锚锭两部分,目前漂浮式基础上所使用的锚泊系统指悬链式或张紧式的系泊系统或者像张力腿平台中固定基础使用的筋腱系统。
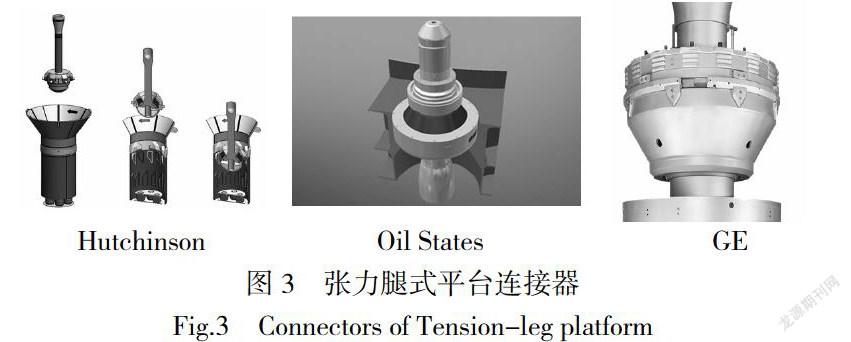
国外大多数TLP平台锚泊系统主要包括张力腿筋腱和锚固基础两个部分,其张力腿所使用的材料均为钢管,采用该材料安全性好,稳定性高,加工工艺简单,并且制造成本低,本身重量也可以通过两端密封的方法来解决,在防腐处理方面的技术也较为成熟。但采用钢管作为TLP平台张力腿时,需要在张力腿与海底基础和平台间连接处设置一个可任意方向摆动的球角接头,即张力腿连接器,其结构复杂,设计制造困难。目前这种连接器只有几家公司有现成产品,其示意图如图3所示。
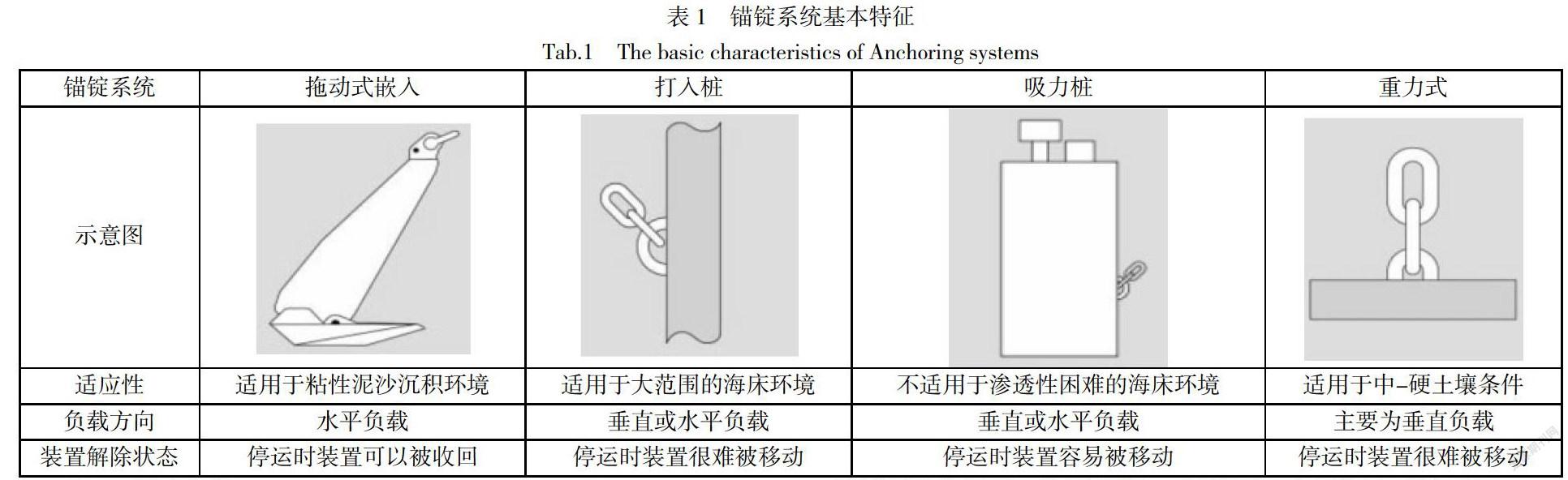
锚锭系统的选择则与海床环境有关,现在主要的锚锭类型有拖动式嵌入、打入桩、吸力桩、重力式(图5)。其基本特征如表1所示。拖动式嵌入主要运用于粘性泥沙沉积环境,打入桩则适用于大范围的海床环境,吸力桩和重力桩均不适用于渗透性困难的海床环境,但在解除装置阶段,吸力桩可被移动,而重力桩则很难进行移动。
1.1.3 模式分析
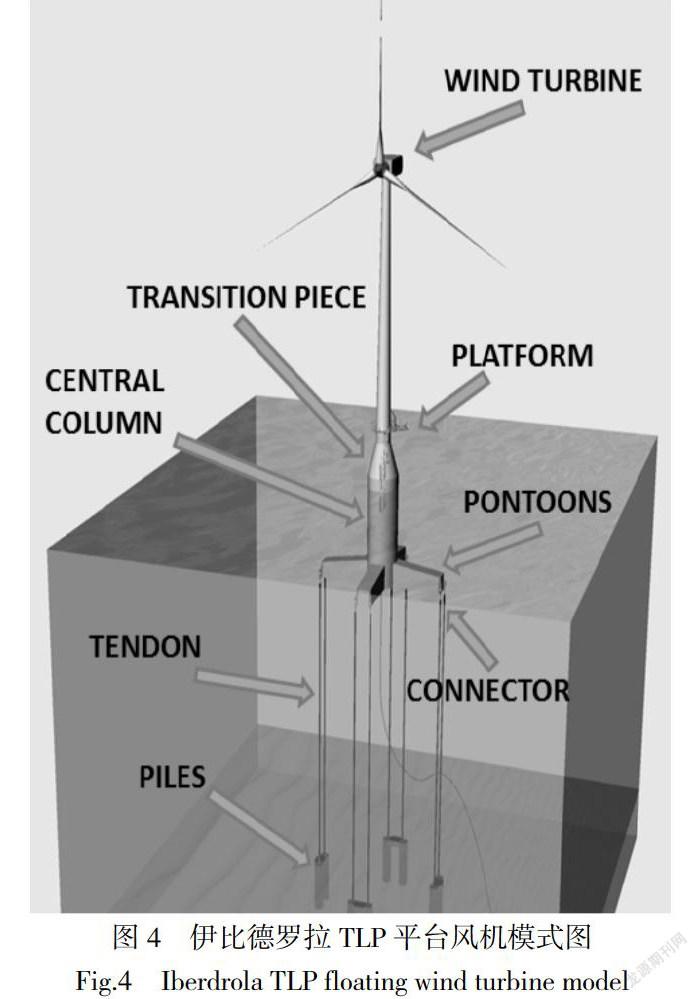
近几年来,西班牙较为杰出的电力公司已经着手研究漂浮式海上风机项目,张力腿式平台(TLP)风机是伊比德罗拉电力公司目前正在进行的一项研究[9]。
如图4 所示,伊比德罗拉TLP平台包括一个中心圆柱和四个直角截面浮筒,每个浮筒的底部都连接了两个筋腱,筋腱由6x37股钢线绕成,以此来支撑5MW风机。每个浮筒的边缘都有两个小口,来连接张紧的系泊缆绳与浮标,系泊缆绳可以由钢或者综合材质构成,在其下部则与吸力桩基础相连接,也可根据当时的地质情况选用打入桩和钻孔桩。
1.2 其他类型基础型式
半潜式基础(SEMI-SUB):主要利用浮力作用,通过将平台浮于海水表面同时以悬链线固定于海底来实现,这种基础通常需要一个大而重的结构来保持稳定,但吃水深度较低,需要通过主动压载设备来保持平台水平。
柱体式基础(Spar):主要通过采用圆柱固定压载来降低重心直到比浮心还低来获得静稳性。其结构底部重而上部较轻,以此提高浮力的重心。Spar式结构吃水深度大,可适用于大水深条件,但受到风浪影响较大。
半潜式、立柱式和张力腿式每种类型都各有特点、优势和劣势,其适用范围也各不相同。我国陆架平缓,尤其是东海海我国陆架平缓,尤其是东海海域远海水深条件相对于欧洲较浅,一般在40-60m之间。立柱式由于结构特点,适用于较大水深海域(100m水深)。此外,半潜式和立柱式采用悬链线式系泊结构,系泊缆长度在5-10倍(3-8倍)的水深,意味着40m水深,缆绳长度可能在200-400之间。远大于我国《海上风电开发建设管理暂行办法》中规定“单个风电机组塔架用海面积一般按塔架中心点至基础外缘线点再向外50m为半径的圆形区域”。同时张力腿基础在外力(风浪流)作用下运动响应更好,对风机的要求和发电量损失更小。
因此本文认为,张力腿(TLP)漂浮式海上风电是垂直系泊的顺应式浮式平台结构的海上风电基础,能够在陆上安装和调试,从而避免了海上安装的各种难题,其最显著的特点是运动性能好,抗恶劣环境能力强,且造价低,是我国未来漂浮式海上风电发展的重要方向之一。
2 国外漂浮式风电技术发展
2.1 发展历程
漂浮式海上风机主要是由风涡轮机、塔筒、浮式平台和锚泊系统组成,这一概念最早是由美国麻省理工大学的Heronemus 教授在 1972 年提出[9],但直到二十年前欧美国家才开始开发用于承载海上风机的浮动式平台。与传统的海上风力发电装置不同,浮动式风力发电机组不需要在海底打樁再架起来,而是将其建在浮动式平台上,并通过系泊装置相连接,由锚固系统固定在海床上,最终通过一条输出电缆将产生的电力输送到陆上电网。如今,欧洲漂浮式海上风电市场百家争鸣,随着第一台试验样机在挪威海域成功运行,葡萄牙、德国、法国等海上风资源丰富国家也相继研发了一系列新概念,并取得了可喜的成绩。
2.2 国外典型TLP平台的海上漂浮式风电项目
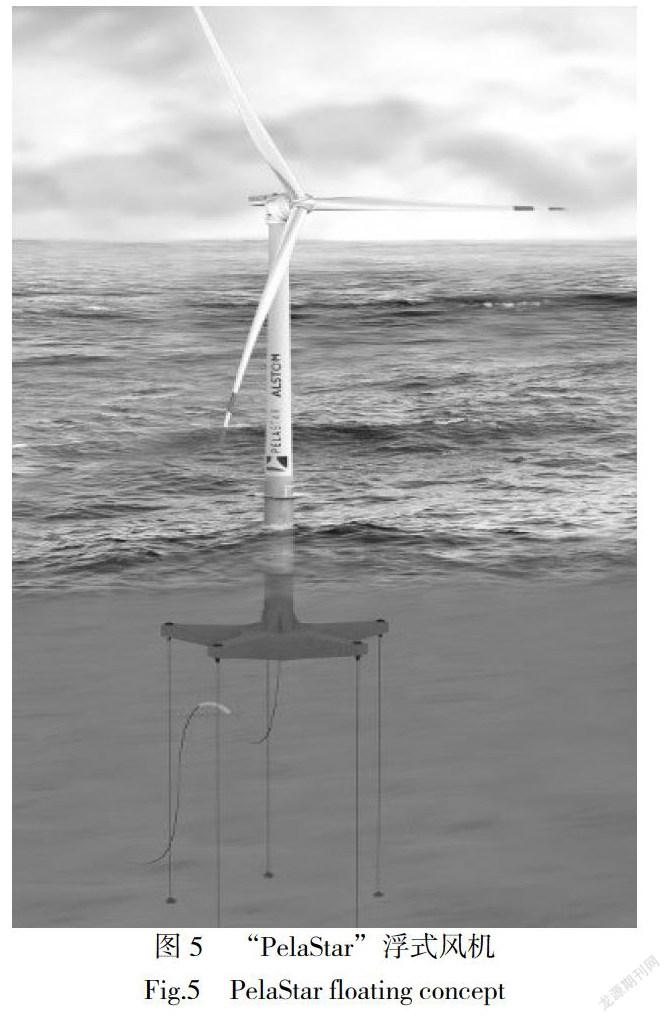
“PelaStar”项目由美国Glosten公司历经多年开发,借鉴了mini-tlp的概念,浮式平台由五个支臂和一个中心圆柱体组成,每个臂上都有一个缆索固定于海底(图5),结构重量较轻。“PelaStar”于2011年被缅因大学选中进行浮式风电的示范工程,这是TLP浮式平台的首次提出。2012年,“PelaStar”被ETI选中进行风浪测试,示范场址位于远离康沃尔的凯尔特海,计划采用6MW Haliade海上风电机组,但该工程由于场地许可的推延被搁置。最近,Glosten机构正在寻求新的测试场址已完成这个试验。
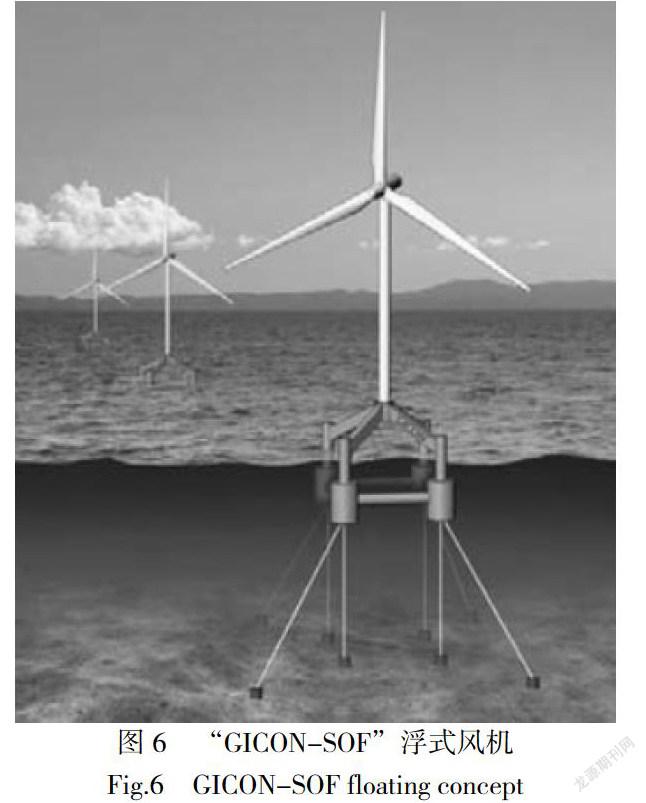
德国2.3WM“GICON-SOF”风机为典型张力腿式结构,主要由四个圆柱体组成,其下则通过四个垂直的拉张式缆绳固定于海底,并且通过四个额外的拉张式缆绳来保持平台的稳定性(图6)。这个项目从2012年开始就经历了大量的水槽试验,并于2017年10月11日通过1:50模型的水池试验。整个试验过程主要模拟了11.4米和12.9米的浪高,整座风机表现非常稳定。研究人员将进一步对试验中获取的数据进行分析,从而改善张力腿漂浮式平台的整体性能。2018年,他们将继续开展第三代张力腿漂浮式平台技术的试验。该项目如果能成功,将会建成世界上第一座张力腿式漂浮式风场。
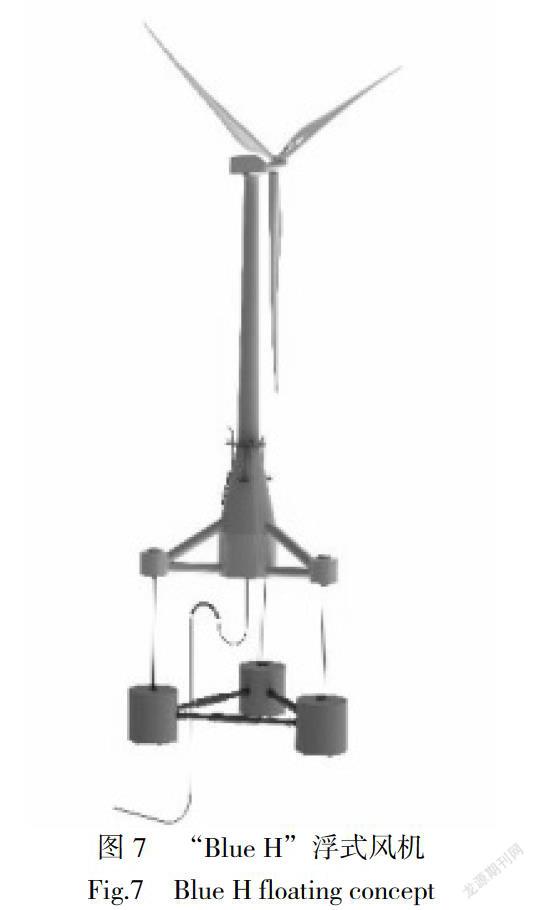
“Blue H”为世界上首座采用TLP基础的漂浮式风电项目,在该项目中,TLP平台至少需要3个张力腿式系泊缆绳,每个缆绳上都有一个适应于海底环境的重力锚系统,风机则被安装于TLP浮式平台的中间。在安装过程中风机刚开始半潜于水中,然后通过抬升力和系泊链张力来使风机上升至指定位置(图7)。2008年,80kw初始模型机被安装在意大利海岸,之后这一概念经历了大量的优化并且进一步减少了结构质量,目前“Blue H”项目正在寻求新的资金来源以构建5-7MW风机概念。
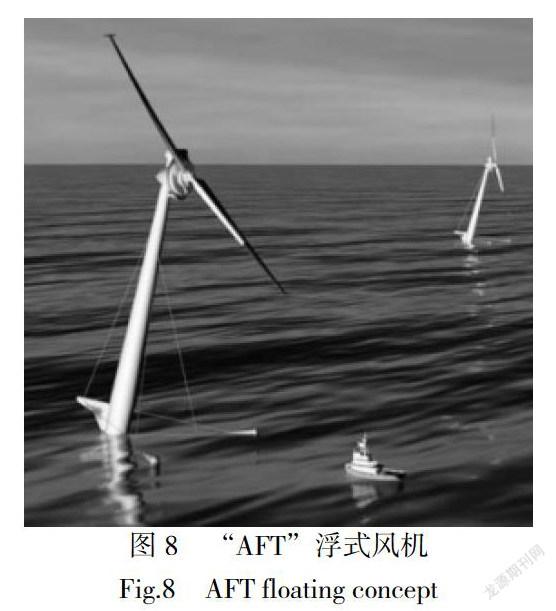
诺帝卡“AFT”风电以张力腿式与半潜式混合型为特征(图8),风机塔筒和基础悬臂梁被水平运输至安装地点,然后通过水压载使风机直立。其主要原理为通过将水压载抽取至平台内部,来改变浮式基础的重量和质心,从而使得“AFT”风机由水平位置旋转至接近垂直的位置。另外,绞缆机对系统安装提供了额外的张力,风机则通过锚锭系统固定于海底来保持稳定性。
3 国内漂浮式风电技术发展
我國海上风能资源丰富,预估可达到750GM的可开发容量,目前相关设计、施工和科研单位已经掌握了在近海和潮间带开发建设的海上风电技术,但是对于深远海域海上风电的开发研究还处于空白地带,因此研究深远海漂浮式风电技术,可以将我国风电建设推向风能资源更加丰富的深远海域,为后续深远海域海上风场大规模开发奠定基础。
通过借鉴国外实例,国内首个海上漂浮式风电示范项目计划在2019年开工,于2015年就开始筹建,建设地点为东海,采用TLP式基础,锚固基础为水下桩基础、吸力锚基础。目前该项目正处于模型试验阶段,现已初步掌握了漂浮式风机基地预拼装施工工艺,水下基础施工工艺与装备,筋腱材料特性及施工工艺,及漂浮式风机整体水上拖航技术。
4 展望
随着海上风电进一步向深远海域发展,其安装和运维成本居高不下是阻碍其发展的一个主要因素。因此,为了减少这些深远海海上风电项目的生产,安装和运维成本,在固定式基础持续进步的同时,漂浮式海上风机基础也逐渐发展起来,并走出试验阶段,走向商业化应用。
欧洲海上漂浮式风电一直是这个行业的领头军,在欧洲委员会及各国政府的资金支持下,其国内的企业、高校和研究机构投入了大量的研究资源,目前已提出了许多新的概念,并进行了各型漂浮风机的物模试验、数值计算分析,建设了样机,同时相关的设计、施工规范(ABS、DNV)也已陆续出版,未来漂浮式风机的大规模应用指日可待。
我国海上风能资源丰富,具备大规模发展海上风电的条件,虽然漂浮式风电研究起步较晚,但可充分借鉴国外的经验和技术,实现漂浮式风电的“弯道超车”。
参考文献
[1]Matha D. Model Development and Loads Analysis of an Offshore Wind Turbine on a Tension Leg Platform with a Comparison to Other Floating Turbine Concepts: April 2009[J]. 2010.
[2]Matha D, Fischer T, Kuhn M, et al. Model Development and Loads Analysis of a Wind Turbine on a Floating Offshore Tension Leg Platform[J]. 2010.
[3]Karimirad M. Floating Offshore Wind Turbines[M]// Offshore Energy Structures. Springer International Publishing, 2014:53-76.
[4]Crozier A. Design and Dynamic Modeling of the Support Structure for a 10 MW Offshore Wind Turbine[J]. Institutt for energi- og prosessteknikk, 2011.
[5]Stewart, G, Lackner, M, Robertson, A, et al. Calibration and Validation of a FAST Floating Wind Turbine Model of the DeepCwind Scaled Tension-Leg Platform: Preprint[J]. Office of Scientific & Technical Information Technical Reports, 2012.
[6]Tracy C. Parametric design of floating wind turbines[J]. 2007.
[7]Nihei Y, Kozen M, Iijima K. Elastic Characteristics of TLP Type Offshore Wind Turbine[J]. American Society of Mechanical Engineers, 2012:159-167.
[8]Nihei Y, Matsuura M, Murai M, et al. New Design Proposal for the TLP Type Offshore Wind Turbines[C]// ASME 2013, International Conference on Ocean, Offshore and Arctic Engineering. 2013:V003T05A026-V003T05A026.
[9]Heronemus W E. Pollution-Free Energy From Offshore Winds [C]// Proceedings of Annual Conference and Exposition Marine Technology Society. Washington D C:Marine Technology Society, 1972.