基于单片机控制的轮腿式六足越障机器人设计
2019-09-10尹一凡
尹一凡









摘 要:腿式机器人运动速度较慢,能量利用效率低,且控制复杂,可靠性差。轮式机器人越障能力弱,环境适应性较差,难以适应复杂地形。为解决上述问题,本文设计并制作了一种轮腿式六足越障机器人,设计一种偏心式轮腿,通过旋转推动机器人行进。这使得机器人从传统的离散点着地变为连续点着地,具有更佳的稳定性和更快的运动速度。同时,偏心轴设计增大了有效半径,可以输出更大的扭矩,也赋予了其出色的越障能力;简单的机械结构增加了可靠性和灵活性。
关键词:六足机器人;轮腿;越障
中图分类号:TP242 文献标识码:A 文章编号:1003-5168(2019)28-0023-06
Design of Six-legged Obstacle - crossing Robot based
on Single - chip Microcomputer
YIN Yifan
(School of Automation Science and Electrical Engineering, Beihang University,Beijing 100191)
Abstract: The leg robot is slow in motion, low in energy utilization, complex in control and poor in reliability. Wheeled robot is weak in obstacle jumping ability, poor in environmental adaptability, and difficult to operate in complex terrain. In order to solve the above problems, this paper designed and made a wheel-legged hexapod reconnaissance robot. The robot changes from the traditional discrete point landing to the continuous point landing, which has better stability and faster movement speed. At the same time, the eccentric shaft design increases the effective radius, can output more torque, but also gives its excellent ability to jump over obstacles. It also avoids complex mechanical structure and has high reliability and flexibility.
Keywords: hexapod robot;wheel leg;obstacle surmounting
1 项目背景
在现代社会,大量机器人被应用于恶劣工作环境中,以代替人类进行危险、肮脏、乏味的任务。移动机器人具有灵活性强、智能化程度高的优点,在宇宙探测、核能开发、矿产开采、救援抢险、战地侦察和扫雷排险等领域有着广泛的应用。在实际应用中,移动机器人时常工作在野外环境中,如灾后废墟、丛林战场、狭小洞穴。高低起伏的地形,错综复杂的地面环境(如碎石、积水、泥泞),给移动机器人的工作带来了极大挑战。而腿式机器人不仅能在平整路面上运动,还能在崎岖的复杂地面行进,具有很强的地形适应性。然而,腿式机器人也有着明显的不足,如运动速度慢、机械结构复杂、能量利用率低。
在太空探测领域,为适应地外星球表面复杂的地形(如月球、火星),各國都把轮腿复合式机器人作为研究重点。1997年,美国发射的索杰纳号火星车是人类送往火星的第一部火星车。该机器人车能在各种复杂的地形上行驶,特别是在火星软沙表面[1]。在这之后,美国相继发射了机遇号、勇气号、好奇号等一系列火星探测车。
2013年,美国宇航局向公众展示了一款名为“ATHLETE”的全地形月球车。该型机器人装备了六条腿,并设计有灵活的转动机构,这使其拥有了出色的转向越障能力。
在此背景下,本文提出了一种六足驱动的轮腿式机器人。其既具有轮式机器人的高速运动能力,还具有腿式机器人的越障能力。该机器人采用六足布局,步态丰富,肢体结构冗余,利用弧形轮式腿的旋转实现快速移动。同时,偏心驱动轴的设计使轮腿的输出力矩显著增加,这也赋予了轮腿式机器人出色的越障能力。此外,该机器人机械结构较为简单,可靠性和灵活性更高。
2 总体设计与分析
2.1 六足轮腿式机器人的步态分析及设计
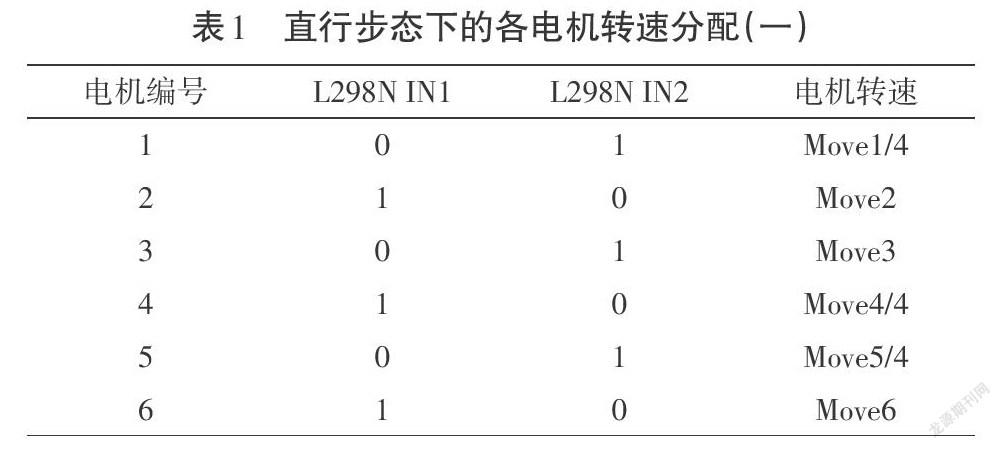
步态规划决定了六足机器人的运动规律,是其适应复杂地形的关键。在本项目中,设计者采用了广泛使用的三足步态规划。同时,采用直流减速电机驱动轮腿,通过对每个电机进行调速,得出标准转速(Move[i],1=<[i]<=6),使得6个电机拥有公共周期[T];同时通过Arduino与L298N的配合实现对电机速度和角度的控制。
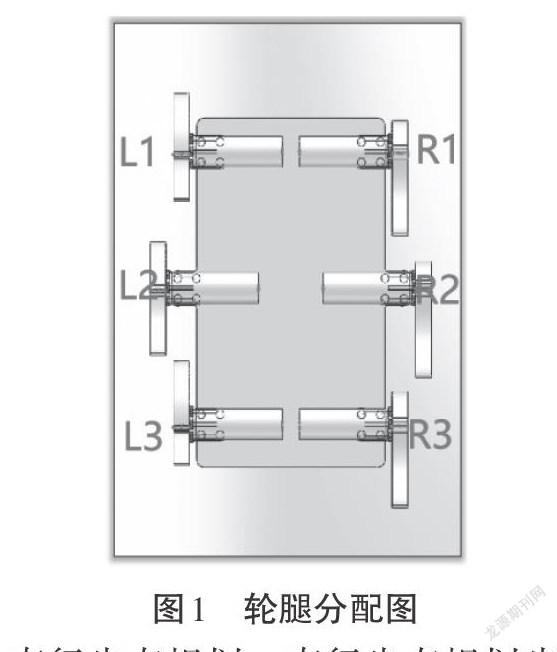
图1为机器人各轮腿编号,以3条轮腿为一组,L1、L3、R2为A组,R1、R3、L2为B组。两组轮腿交替支撑和摆动,以实现直行、转弯等多种步态。
2.1.1 直行步态规划。直行步态规划步骤具体如下所示。
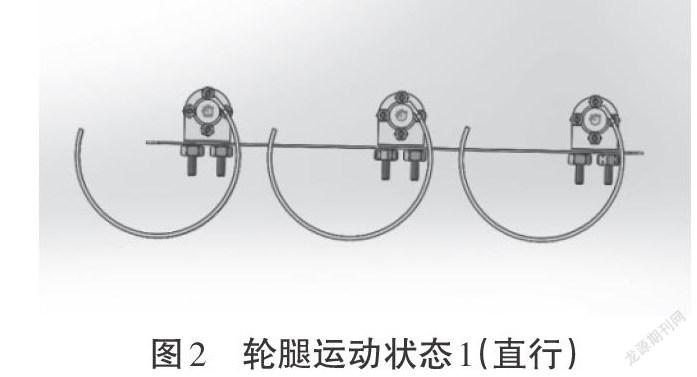
①初始状态下,机器人的6条轮腿均处于前极限位置,具体如图2所示。
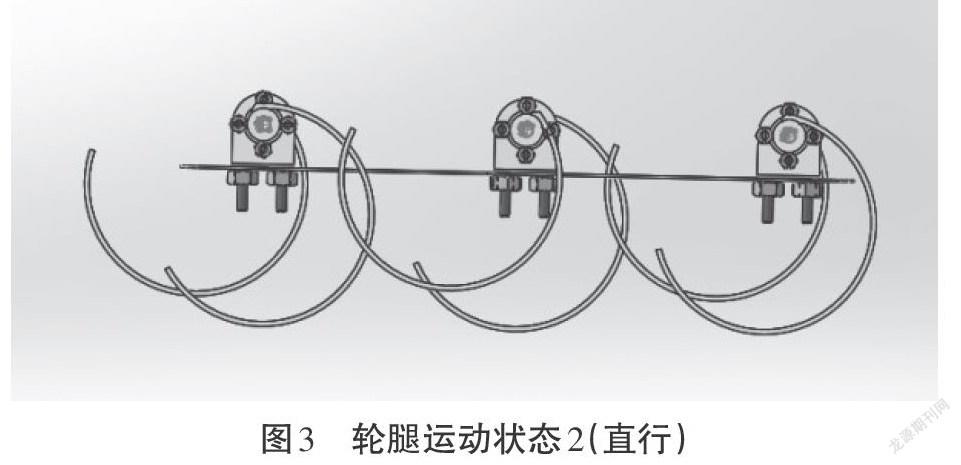
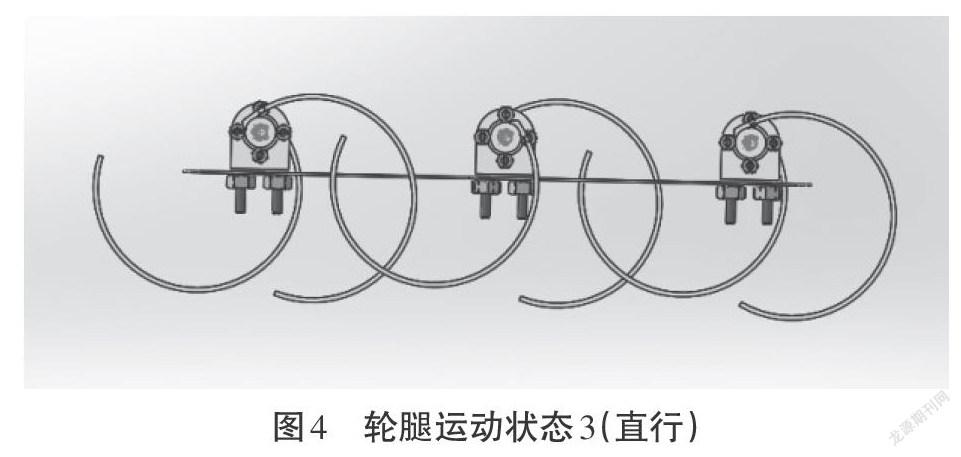
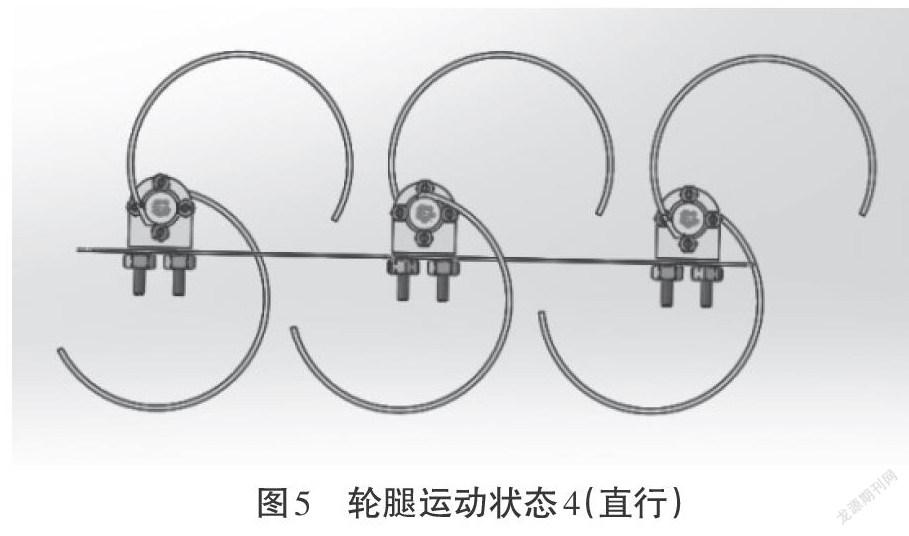
②接着,按表1所示调节电机转速,使A组轮腿逆时针同步转动,如图3所示。当A组轮腿到达后极限位置时,B组电机逆时针旋转,使机器人向前运动,如图4至图5所示。
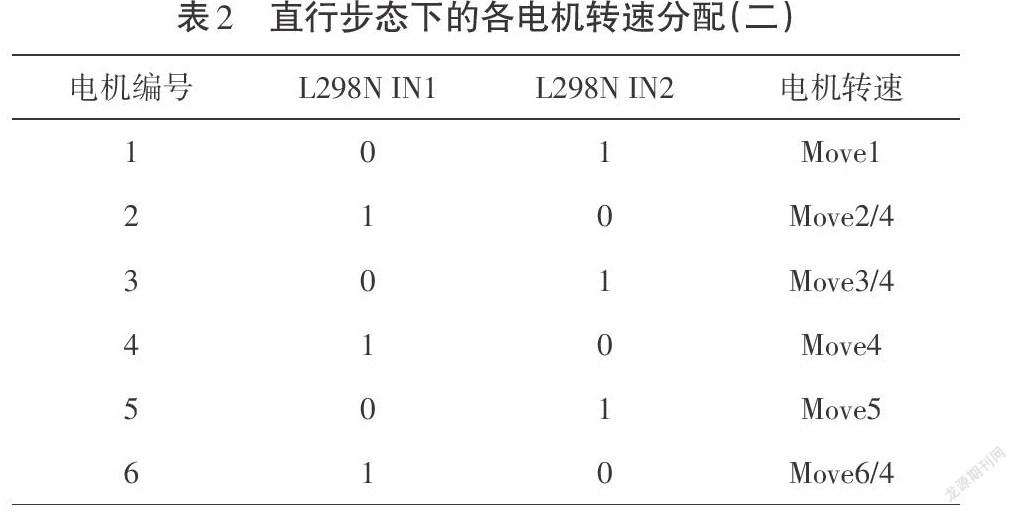
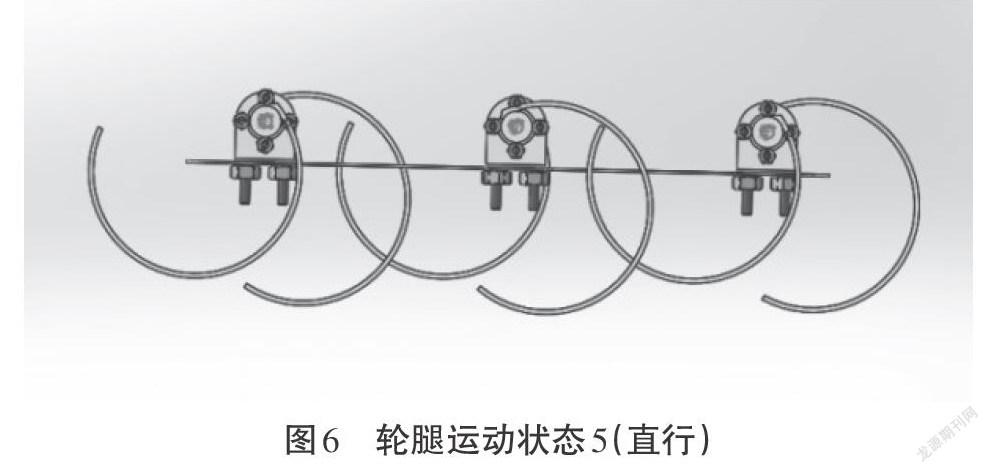
③当A组轮腿的摆动状态结束后,B组轮腿也刚好结束支撑状态。此时,按表2所示调节电机,使得A组轮腿再次进入支撑状态,而B组轮腿进入摆动状态,如图6所示。
直行步态下各轮腿相位如图7所示。
2.1.2 转弯(左转)步态规划。转弯(左转)步态规划步骤如下所示。
①初始状态下,A组轮腿处于前极限位置,B组轮腿处于后极限位置,具体如图8所示。
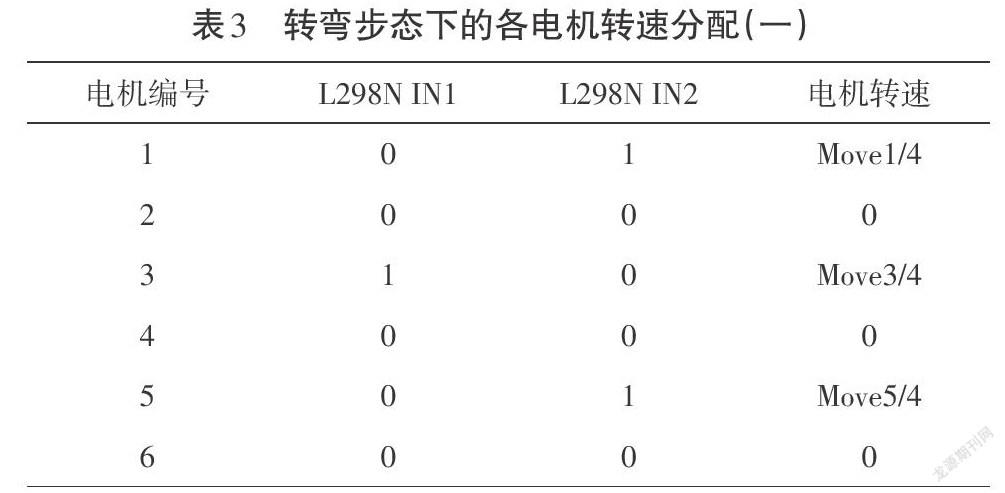
②首先,按表3所示调节电机转速,使轮腿L1、R1、L3、R3至后极限位置,轮腿L2、R2至前极限位置,设该位置为左转弯的初始位置,如图9所示。
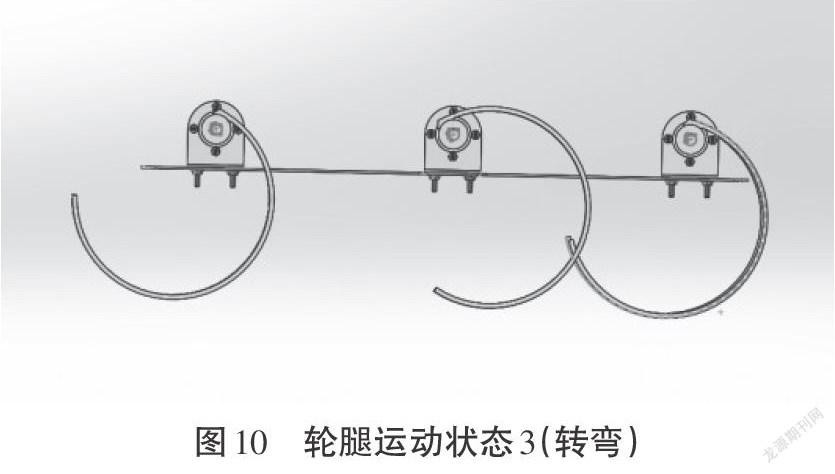
③接下来,根据表4所示调整电机,A组轮组顺时针旋转,B组车轮逆时针旋转,使L1、R1、L3和R3移动到前限位置,L2、R2运动至后极限位置,如图10所示。
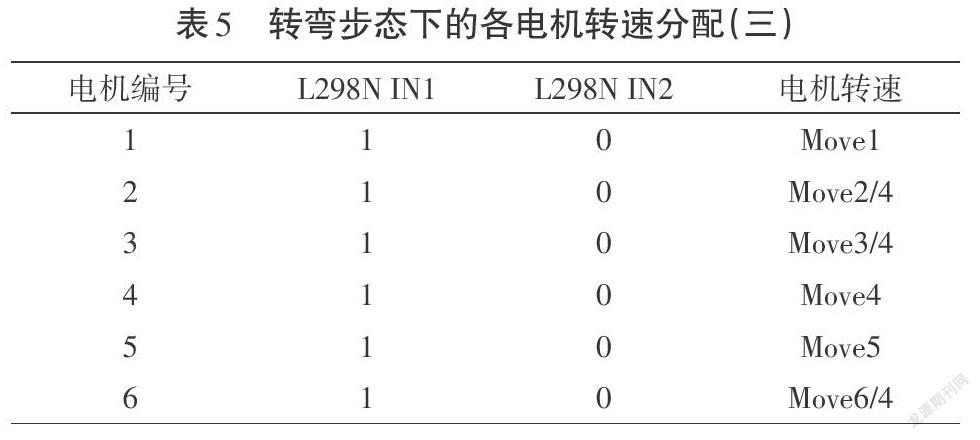
④接下来,根据表5所示调节电动机,A组轮腿顺时针旋转,B组轮腿逆时针旋转,让每条腿返回左转的初始位置,如图11所示。
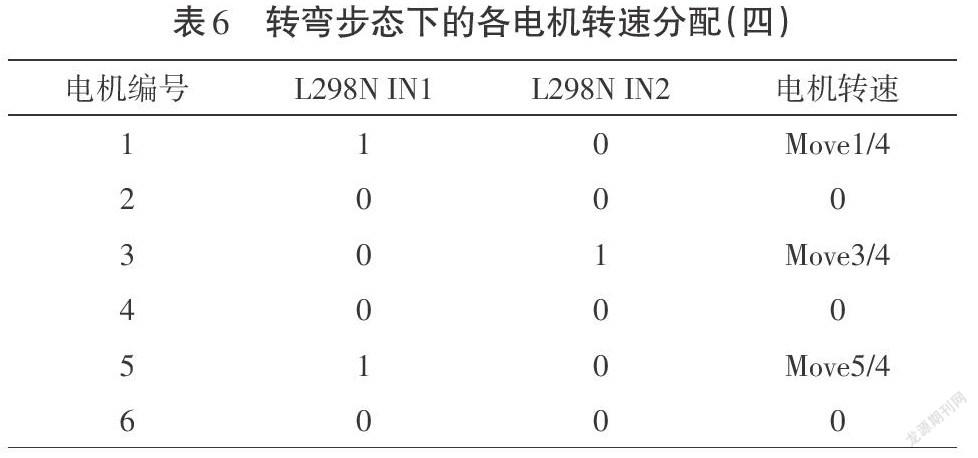
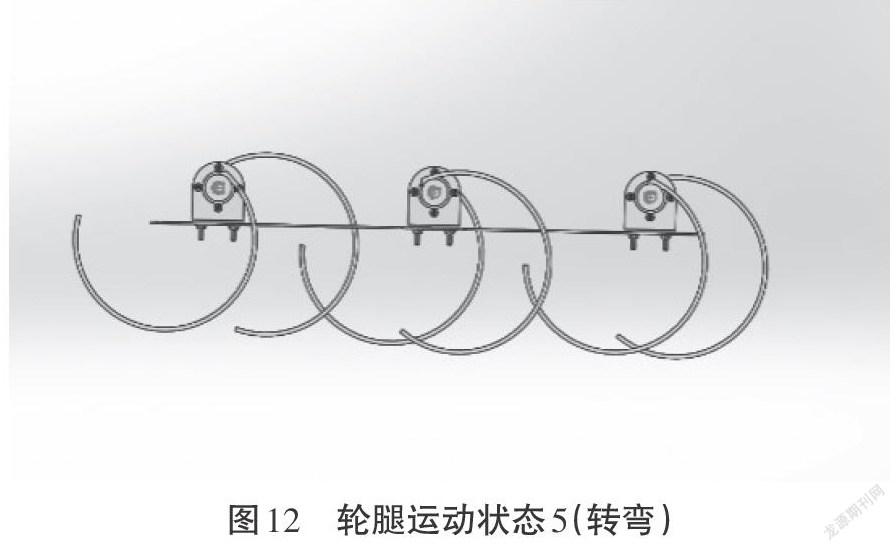
⑤若需要从转弯步态回到前进步态,按表6所示调节电机,将L1、R2、L3调至前极限位置;R2,L2,R3调至后极限位置,如图12所示。
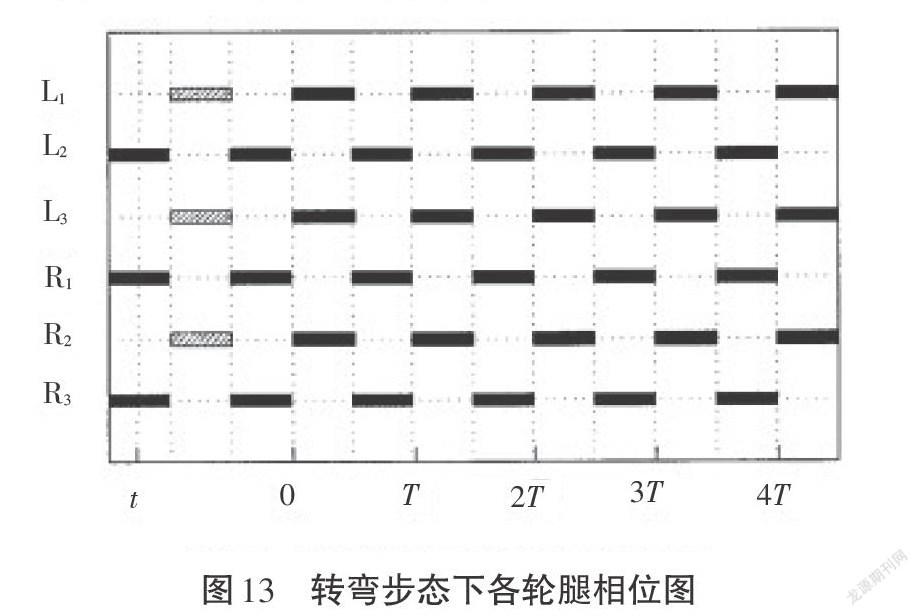
转弯步态下各轮腿相位如图13所示。
按照上述运动方式,笔者在Arduino平台上完成了三足步态规划的程序设计,如图14所示。
2.2 结构设计
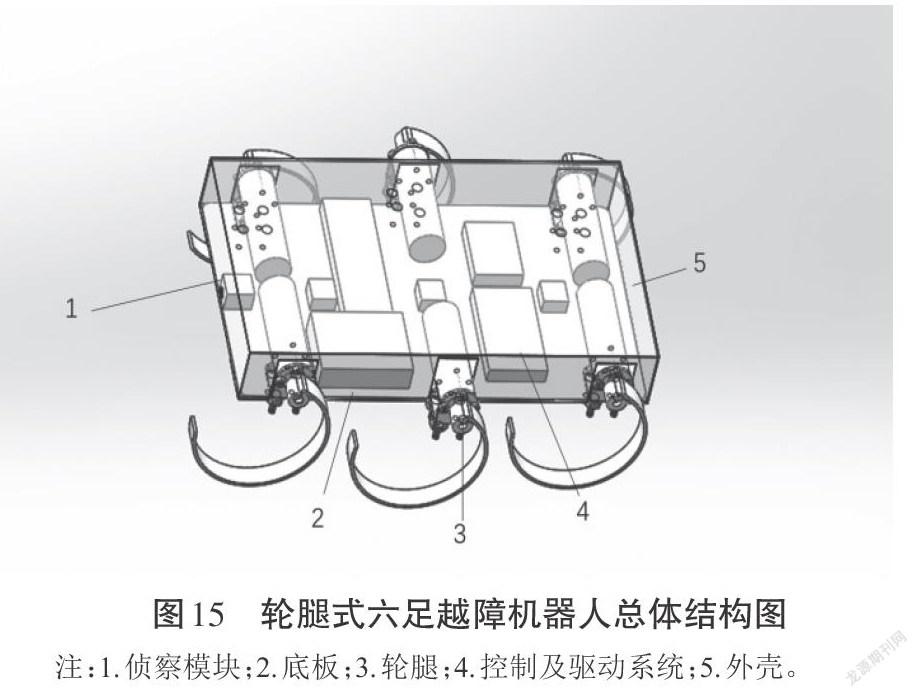
2.2.1 总体结构设计。本文设计的轮腿式六足越障机器人整体结构如图15所示,其主要由底板、轮腿、外壳、控制模块和侦察模块组成。其中,底板由钢板搭建而成,具有较高的强度和结构稳定性,有利于机器人在崎岖的环境中应对侧翻、颠簸、撞击、倾覆、翻转等运动状况。六个轮腿的设计参数相同,由弯曲组件构成,对称布置在底板两侧。位于中部的轮腿离机器人轴线较远,错开轮腿的宽度,避免底板过长以减轻自重。外壳中则封装有电源、电机及单片机主板等设备,并合理分配质量,使机器人的质心处于上下、左右的对称位置。这有利于避免机器人倾覆,并且进一步增强了复杂地形的适应性。
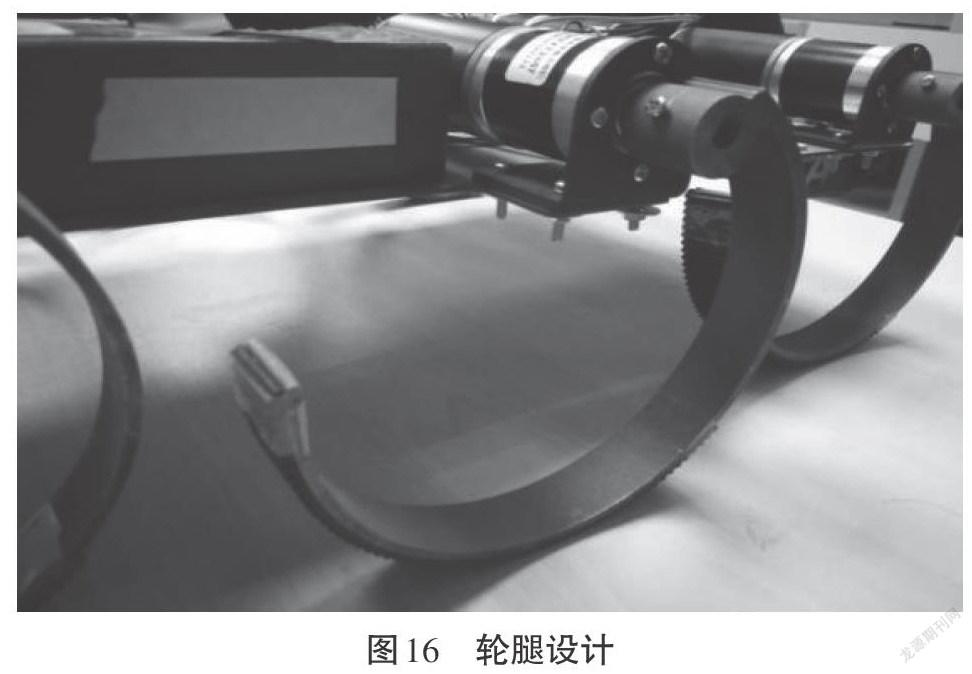
2.2.2 轮腿设计。轮腿采用偏心轴设计,通过旋转推动机器人前进。在动力上,设计者采用了24V直流减速电机驱动偏心轴,可以输出大扭矩,实现了机器人的野外运动与越障攀爬。在材料选取上,设计者选用了兼具弹性和硬度的弹簧钢,并在轮腿触地部分加装了橡皮垫。与简单的腿部设计相比,具有偏心设计的轮腿使机器人由离散点触地变为连续点触地[2],移动速度更快,稳定性更强。具体的轮腿设计如图16所示。
2.2.3 控制设计。控制系统主要由发射器、接收器、驱动源和传感器等四部分构成。发射器以手机软件Blinker为载体,以WiFi为媒介传输,通过操作者发出的遥控信号实现控制。接收器由WiFiduino和Arduino Mega2560组成。WiFiduino作为中间设备,通过与IIC接口的连接实现与Arduino Mega2560的通信。WiFiduino接收到Blinker的信号后,进行一些简单的代码转换,然后传给Arduino Mega2560进行后续操作。
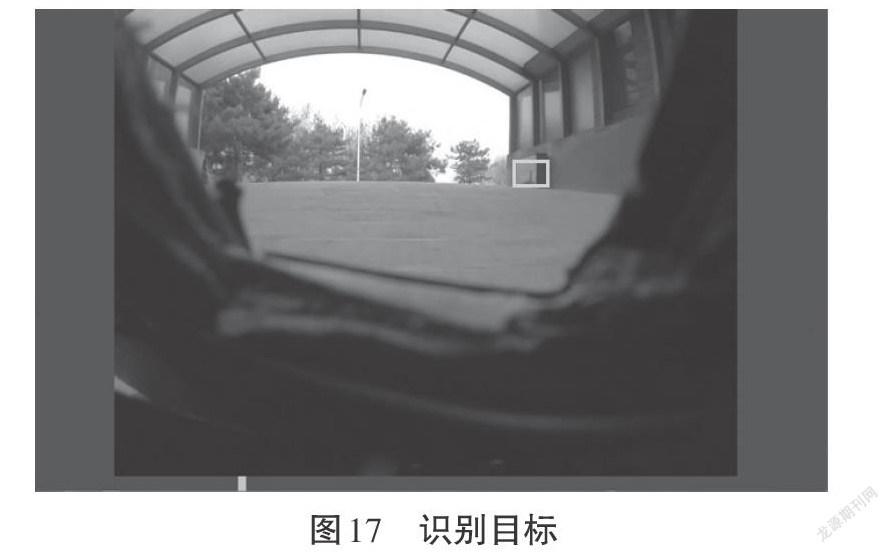
2.2.4 侦察模块设计。该机器人主要用于环境信息采集。结合应用的实际需求,设计者选择GoPro HERO7 Black摄像头用于环境图像的采集,并利用WiFi模块回传至上位机。在目标识别跟踪上,采用高效准确的KCF算法,用于对侦察对象的识别跟踪。GoPro HERO7 Black摄像头性能参数如表7所示。识别的目标如图17所示。
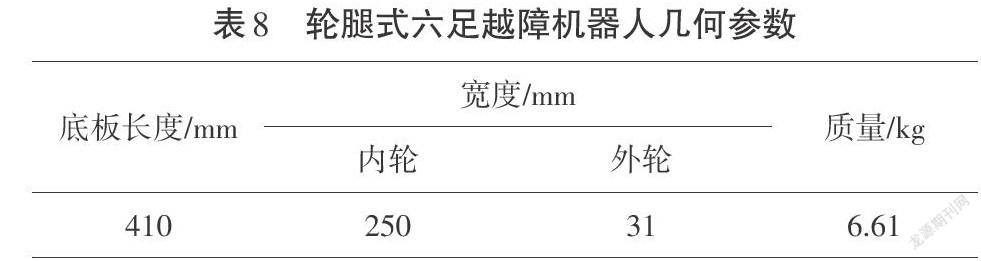
2.2.5 整体尺寸。设计的轮腿式六足越障机器人几何参数如表8所示。轮腿式六足越障机器人实物图如图18所示。
3 试验分析
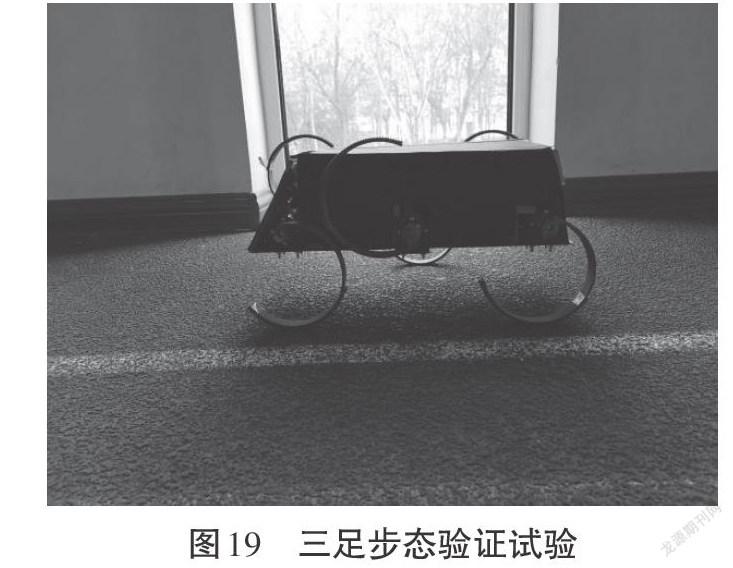
为了更好地研究轮腿式六足机器人的地形适应能力,设计者在多种地形环境中对样机进行了试验,验证理论分析和设计的可行性。同时,选择最合适的轮腿半径、弯曲角度、前进速度以及质量分配,从而获得更强越障能力和更快的运动速度。三足步态验证试验如图19所示。
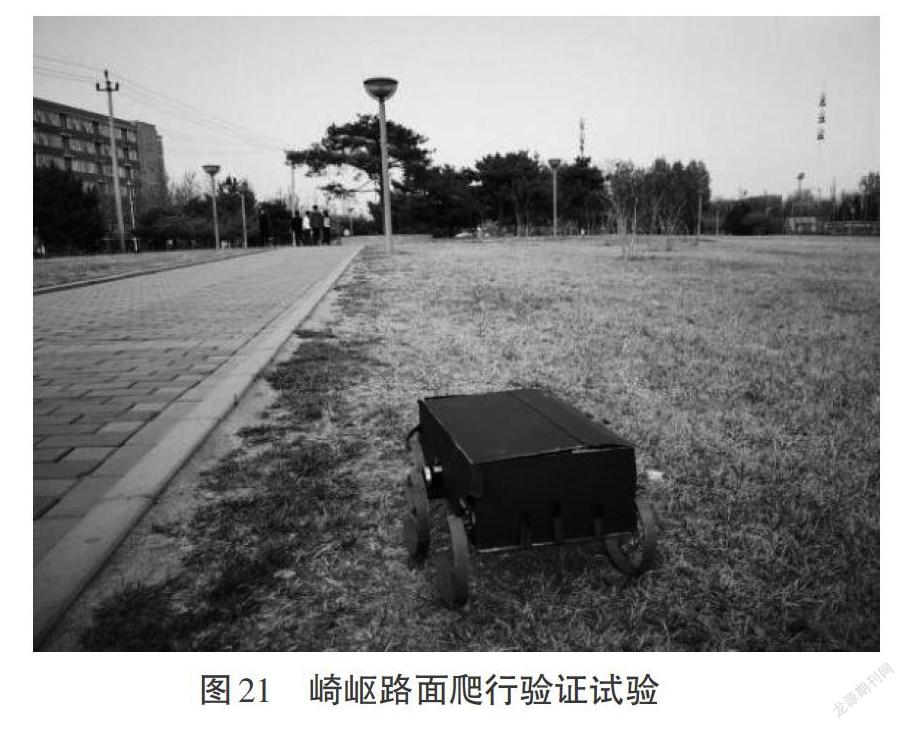
从试验样机的野外试验可知,六足轮腿式设计完全满足机器人行走和越障的各种要求。设计者分别在公路、斜坡、草地、台阶等多种地形中验证了六足轮腿式机器人的爬行和越障能力(见图20至图21)。试验发现,机器人在不同平整度的路面上均保持了较快的运动速度,在草地、台阶等崎岖地形上表现出了出色的越障能力,这充分体现了轮腿兼顾速度和越障能力的优势。同时,在试验过程中,機器人的运动表现出高度的稳定性和可控性,证明三足步态规划的可行性和可靠性。
4 项目特色与应用
4.1 军事侦察
在执行反恐、排爆等军事任务中,现场侦察是关键一环,充分掌握现场的环境情况,是任务顺利完成的必要前提。本项目设计的轮腿式六足越障机器人具有出色的越障能力,可适应洞穴、丛林、山地、沙漠、戈壁和湿地等多种环境。同时,该机器人结构简单、可靠性强,且具有较高的运动稳定性,能适应战场苛刻的性能需求。
4.2 救援抢险
在地震、海啸、爆炸等灾害后,会出现大量建筑物废墟。废墟环境较为复杂,且结构不稳定,易发生坍塌等二次灾害,搜救难度极大。而本项目设计的轮腿式六足机器人体型轻巧,且具有出色的越障能力和复杂地形适应能力,可用于快速获取灾害信息,协助科学决策和调度,以及快速搜索和定位幸存者。通过摄像头、红外传感器设备,该机器人可以实现废墟场景重现、生命活动检测、废墟内外通信等功能,在救援领域具有极大的应用价值。
5 结论
本文设计并制造了一种轮腿式六足越障机器人,既具有高速运动能力,又具有出色的越障能力,兼具轮式和腿式机器人的优点。设计者设计了偏心式轮腿,结合腿和轮的优点,使机器人从传统的离散点触地变为连续点触地,具有更好的稳定性和更高的移动速度。同时,偏心轴设计增大了有效半径,可以输出更大的扭矩,这也赋予了其出色的越障能力。该机器人采用六足布局,步态丰富,稳定性高;同时,机械结构简单,具有更高的稳定性。设计者采用三足步态控制,实现了直行、转弯、跳跃、翻转等多种姿态的动作。利用侦察模块,机器人还具有目标识别、定向追踪、路径规划等功能。目前,该机器人在军事侦察、抢险救援、地质勘探等领域得到广泛应用。通过对此机器人平台的进一步优化改进,同时采用多元模块化设计,使该轮腿式六足机器人具有广阔的市场前景。
参考文献:
[1]王浩.轮腿式六足侦查机器人设计与分析[D].南京:南京理工大学,2017.
[2]李满宏,张明路,张建华,等.六足机器人关键技术综述[J].机械设计,2015(10):1-8.
