无刷直流电机的转子位置检测新策略
2019-09-10杨胜浩李俊良赵建营
杨胜浩 李俊良 赵建营



摘 要:在电机速度控制系统中,转子位置检测至关重要。通过分析反电动势法及其改进方法可知,当电机在低速运行时,反电动势过零检测法的幅值太小而无法被检测到。对此,本文提出了一种新的转子位置检测方法,并对该方法进行仿真分析。该方法通过检测线端电压差的过零点,然后延迟90°机械角得到转子位置信号。仿真结果表明,当电机低速运行时,新方法均能准确获取到转子位置信号,电机有更宽的运行范围。
关键词:无刷直流电机;无位置传感器;线端电压差
中图分类号:TM33 文献标识码:A 文章编号:1003-5168(2019)31-0047-03
Novel Strategy for BLDC Motor Rotor Position Detection
YANG Shenghao LI Junliang ZHAO Jianying
(CAMA(LuoYang) Electronics Co., Ltd.,Luoyang Henan 471003)
Abstract: In the motor speed control system, rotor position detection is very important. By analyzing the back EMF method and its improved method, it can be seen that when the motor is running at low speed, the amplitude of the back EMF zero crossing detection method is too small to be detected. In this paper, a new rotor position detection method was proposed, and the simulation analysis of the modified method was carried out. By detecting the zero crossing point of the line terminal voltage difference, and then delaying 90° mechanical angle, the rotor position signal is obtained. The simulation results show that when the motor runs at low speed, the new method can get the rotor position signal accurately, and the motor has a wider range of operation.
Keywords: Brushless DC motor;position sensorless;line terminal voltage difference
1 研究背景
无刷直流电机(Brushless Direct Current Motor,BLDCM)在调速系统中占有重要地位,其性能直接决定系统性能的好坏。无刷直流电机采用电子换相,需要通过位置传感器获取转子位置信号,以控制电子换相装置完成换相,因此转子位置信号的获取至关重要。目前,我国工业控制中使用的无刷直流电机大多数是通过电子或机电式位置传感器直接检测电机的转子位置信号[1],但在检测时,仍存在较多问题。一方面,当电机工作于高温、高压、潮湿等恶劣环境时,位置传感器的性能将会降低,甚至不能正常工作;另一方面,位置传感器的安装和安装精度,以及位置传感器与电机之间的众多连线,不仅导致电机的体积、制造成本增加,工艺难度提高,而且直接影响电机的运行性能和运行可靠性[2,3]。
国内外提出的无位置传感器转子位置的检测方法有反电动势过零检测法、续流二极管法、电感法和状态观测器法等[4]。反电动势过零检测法的原理是通过检测不导通相反电动势过零点并延迟30°可得无刷直流电机的实际换相时刻[5]。在反电动势过零检测法基础上改进的转子位置检测方法有线反电动势法、相电压法、线相电压法和端电压法[6-8]。这些方法共同的不足是当电机低速运行时,被测量的幅值很小或为零,检测误差较大或检测不到,导致电机换相失败。由此,本文通过分析和计算得到一种改进的转子位置检测方法。
2 线端电压差值过零检测法原理
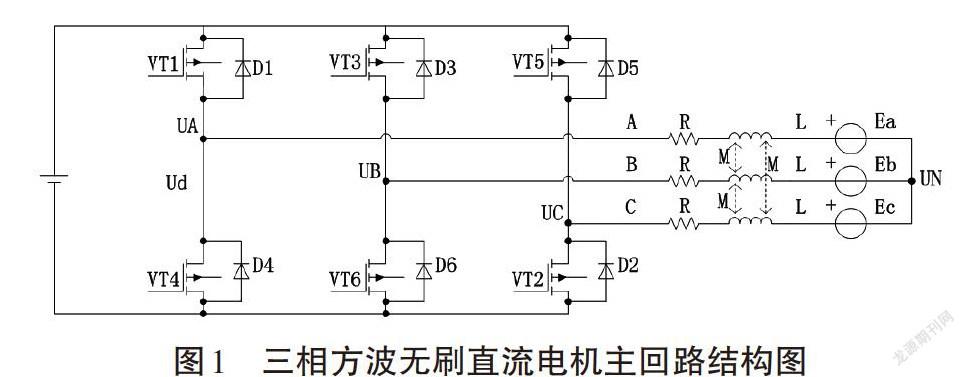
三相方波无刷直流电机主回路采用三相全桥驱动的控制方式,每一时刻只有两相处于导通状态,另一相处于悬空状态,每60°换相一次,一个周期有6次换相。三相方波无刷直流电机主回路结构如图1所示。图1中的A、B、C分别代表电机三相绕组。為了分析方便,进行如下假设[9]:①电机三相绕组采用星型结构,绕组对称且相位在空间上相差120°;②忽略涡流损耗和磁路饱和;③不计三相绕组电枢反应;④电机三相绕组电阻、自感和互感均为常数且相同。
根据以上假设,无刷直流电动机端电压方程的矩阵为:
[UAUBUC=R000R000RiAiBiC+L-M000L-M000L-MPiAiBiC+eAeBeC+UNUNUN] (1)
式中,[UA]、[UB]、[UC]分别为电机三相定子绕组端电压,[R]为定子绕组电阻;[P]为微分算子;[L]为定子绕组等效自感;[M]为定子绕组等效互感;[iA]、[iB]、[iC]为三相定子电流;[eA]、[eB]、[eC]为三相定子绕组反电动势;[UN]为电机三相绕组电机中点电压。
在非换相区间,以A、C两相导通和B相为非导通相为例进行分析,假定电流从A相流到C相,即[ic=-ic=I],[eA=-ec=E],[eB∈-E,E],由于电机三相定子绕组Y形连接,三相电流满足式(2):
[iA+iB+iC=0] (2)
由式(1)得到线端电压差为:
[UABCA=UAB-UCA=3RiA+3L-MPiA+3eA-eB] (3)
[UBCAB=UBC-UAB=3RiB+3L-MPiB+2eB] (4)
[UCABC=UCA-UBC=3RiC+3L-MPiC+3eC-eB] (5)
其中,[UAB]、[UBC]、[UCA]为端电压差。因为A、C为导通相,B相为非导通相,在非换相区间,如果非导通相绕组在其整个关断期间无续流,那么,[iB]=0,式(4)可以进一步化简为:
[UBCAB=UBC-UAB=2eB] (6)
从(6)式可以看出,在非换相期间,当B相不导通且其绕组内部无续流流过时,电动势[eB]只与线端电压差[UBCAB]有关,且是二倍关系,所以,在电机低速运行时,和其他几种方法相比更易检测到过零点。因此,在非换相期间,B相不导通时,线端电压差[UBCAB]的过零点就是反电动势[eB]的过零点。
在非换相期间,对于A、C两相,因为[iA]和[iC]变换缓慢,其微分值很小,并且定子绕组[R]值也很小,为了便于分析,忽略其影响。式(3)和式(5)可以化简为:
[UABCA=UAB-UCA=3eA-eB] (7)
[UCABC=UCA-UBC=3eC-eB] (8)
由式(7)和式(8)可以看出,線端电压差[UABCA]、[UCABC]只与反电动势有关系。当[eB]在区间[[-E,E]]变化,线端电压差[UABCA∈4E,2E]、[UCABC∈-2E,-4E]。
综上所述,在整个B相断开期间,三相线端电压差幅值始终比较大。同样,对A相或者C相断开进行分析,上述结论仍然成立。以上结论成立的条件是:断开相绕组在非换相期间无续流电流流过,而断开相绕组有无续流电流取决于调制方式。研究证明[10],H-PWM-L-PWM调制方式在关断期间没有续流,所以选用H-PWM-L-PWM调制方式。
3 MATLAB/Simulink环境下无刷直流电机仿真模型设计
为了验证该方法,无刷直流电机转子位置检测控制系统采用调整转速的方式,电流双闭环控制策略如图2所示。在转速较低的情况下,反电动势很小或者为零,工作在外同步阶段,需要采用专门的起动电路。当电机达到给定转速,切换至自同步阶段。
3.1 外同步模块
外同步模块主要完成外同步阶段电机的起动。本文采用“三段式”起动法[11]:转子预定位、加速阶段和同步切换阶段。首先,转子在给定的换相逻辑下,使磁极转到预设位置。预定位完成以后,电机在给定加速信号和换相逻辑信号下完成加速。当电机达到一定的转速,自动切换至自同步阶段运行。
3.2 自同步模块
自同步模块主要完成延迟90°-[a]换相。端电压经过滤波,会导致后端电压波形产生延迟。延迟角度[a]的大小区取决于电机的运行速度,相关公式为:
[a=tan-12πRR1Cp60(R+R1)n] (9)
其中,分压电组[R]和[R1]、滤波电容[C]和电机极对数[p]均由电路自身决定。由此可以看出,延迟角[a]随着转速的增大而增大。当转速[n]=1 000r/min时,滤波产生的延迟角[a>30°]。所以检测到线端电压过零点后,不再是延迟[30°-a]换相,只能采用[90°-a]换相方法,这样可以避免[a>30°]时过零检测失败。
4 无刷直流电机控制系统仿真
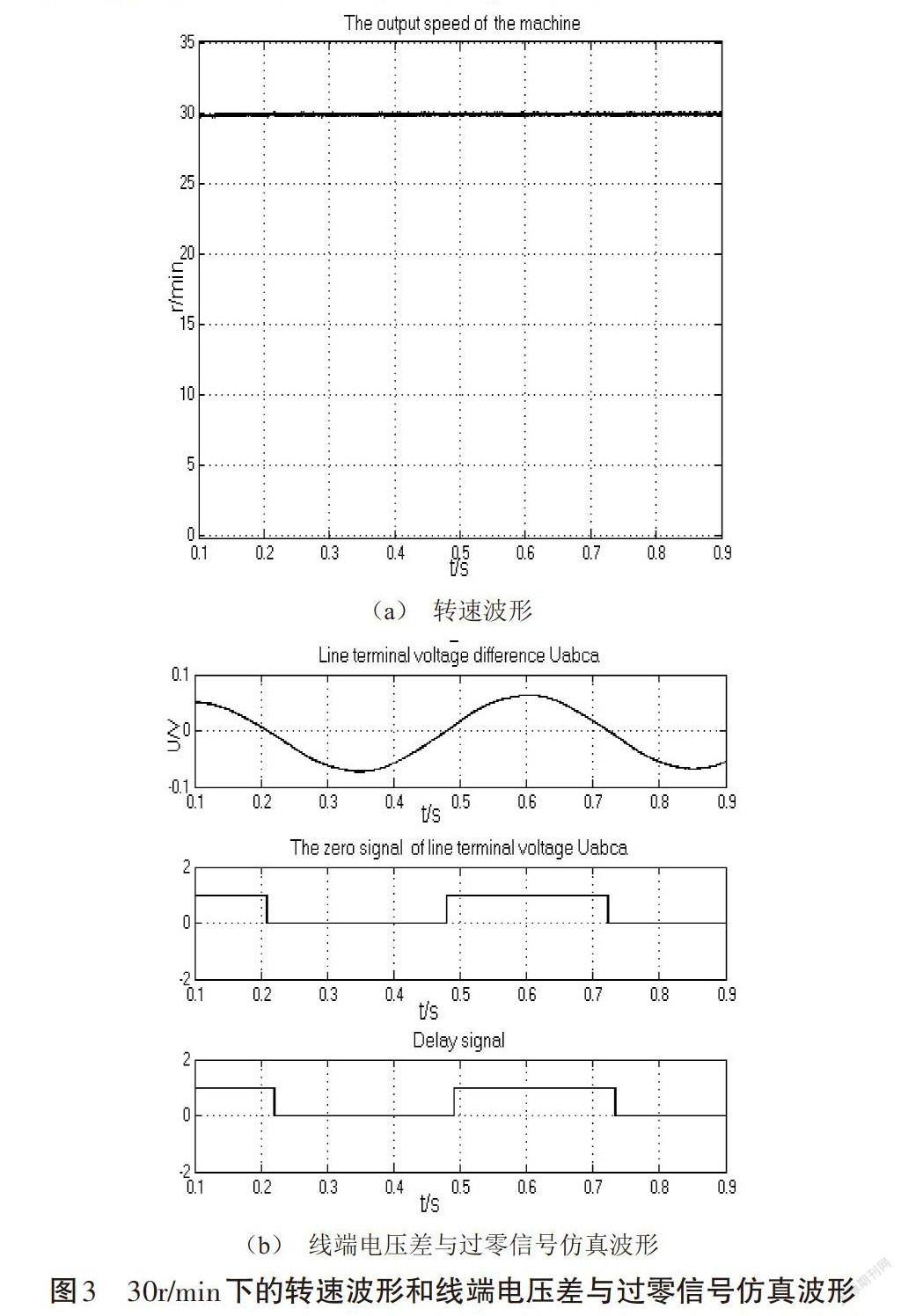
基于给定参数在电机低速运行时验证本课题方法能准确换相。
图3是给定转速30r/min下电流和线端电压差值与过零信号的仿真波形。从图3可以看出,在电机低于50r/min时,转速波形良好,系统依然能够精确检测到线端电压差过零点,获得转子位置信号,控制电机正确换相。
对线反电动势过零检测法与线端电压差值过零检测法进行比较分析,图4是给定转速30r/min下线反电动势过零检测法转速和线反电动势与线端电压差值过零信号仿真波形图。从图4可以看出,其转速波形呈现周期性波动,整个仿真期间仅检测到一次过零点,换相点丢失。而线端电压差值过零检测法在同样的仿真时间段检测到三次过零点,不会错失换相点,其灵敏度较高。因此,传统检测方法只适用于转速大于50r/min,但新的检测方法适用于更低的转速。
综上所述,本文设计的新检测方法和其他转子位置检测方法相比,其优势在于位置信号获取精确度和灵敏度高。试验和仿真结果表明,本文提出的转子位置检测方法能实现低速运行,制造成本较低,提高了电机工作在高温、高压、潮湿等恶劣环境中的可靠性,能满足实际需要。
参考文献:
[1]吴鹏坤,贾琴妹.无位置传感器无刷直流电机控制系统仿真研究[J].伺服控制,2011(4):29-33.
[2]夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009.
[3]张琛.直流无刷电动机原理及应用[M].2版.北京:机械工业出版社,2006.
[4]谭建成.永磁无刷直流电机技术[M].北京:机械工业出版社,2011.
[5]刘刚,王志强,房建成.永磁无刷直流电机控制技术与应用[M].北京:机械工业出版社,2008.
[6]焦晓磊,高延丽,潘劲.无刷直流电机无位置传感器控制系统仿真及试验研究[J].电机与控制应用,2013(10):36-39.
[7]郭研岐,李红.无位置传感器无刷直流电机换相点自校正控制方法研究[J].微电机,2013(2):59-62,70.
[8]邹继斌,江善林,张洪亮.一种新型的无位置传感器无刷直流电机转子位置检测方法[J].电工技术学报,2009(4):48-53.
[9]范冰洁,李玉忍,陈永禄.基于遗传算法的无刷直流电机控制参数优化[J].计算机仿真,2009(8):188-191,198.
[10]李春海,汪海宁.不同PWM调制方式下无刷直流电机非导通相续流分析[J].微特电机,2013(6):39-41,49.
[11]刘海亭,汪剑鸣,窦汝振,等.无刷直流电机启动过程仿真研究[J].计算机仿真,2012(1):389-394.
