自动导盲小车设计
2019-09-10吕杰
吕杰
摘 要:本文设计了一种导盲小车,以AT89S52单片机作为控制核心,以小车作为动力机构,利用小车牵引盲人前进。本设计采用超声波测距检测障碍物与盲人之间的距离,通过语音播报距离和蜂鸣器报警提示,提前预警,遇到障碍物时可控制小车自动转向,使盲人及时避开障碍物。
关键词:导盲小车;单片机;超声波测距;语音播报;报警
中图分类号:TN967.1;TP274.53 文献标识码:A 文章编号:1003-5168(2019)32-0064-03
Design of Automatic Guide Car
LYU Jie
(Ningxia Institute of Science and Technology,Shizuishan Ningxia 753000)
Abstract: This paper designed a blind guide car, which used AT89S52 single-chip microcomputer as the control core and the car as the power mechanism. This design uses ultrasonic ranging to detect the distance between obstacles and blind people, and broadcasts the distance by voice and the buzzer alarm prompts to give early warning. When encountering an obstacle, the car can be controlled to turn automatically, so that the blind can avoid the obstacle in time.
Keywords: automatic guide car;MCU;ultrasonic ranging;voice broadcast;alarm
中國是世界上盲人最多的国家,中国残疾人联合会发布的数据显示,截至2016年,中国至少有1 731万盲人。随着经济的发展,城市中的交通越来越繁忙,城市中的盲道屡屡遭到侵占或者破坏,这对于出外行走的盲人无疑造成了巨大的安全隐患。如何解决这些安全隐患显得无比迫切与重要[1]。传统的导盲手段有手杖和导盲犬,而导盲机器人、超声波、无线电、红外线、卫星等导盲系统、盲人电子眼镜等现代化导盲手段正逐步走进盲人的生活,增强了盲人的行走能力,提高了盲人的生活质量[2]。
1 总体设计
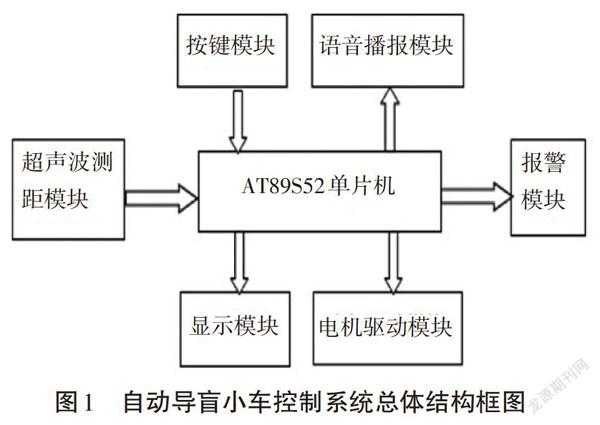
本文针对盲人在地面比较平整的公共场所行走的场合,将避障小车和导盲拐杖结合在一起,设计了一种自主动力导盲小车。导盲小车由小车、拐杖及自动导盲控制系统三部分组成。其中,自动导盲控制系统由主控芯片AT89S52单片机、超声波测距模块、语音播报模块、报警系统、按键模块和电机驱动模块等模块组成,控制系统总体结构框图如图1所示。当检测到前方障碍物时,通过语音模块发出警告信号,蜂鸣器报警,遇到障碍物时能控制小车自动转向,牵引盲人避开障碍物。
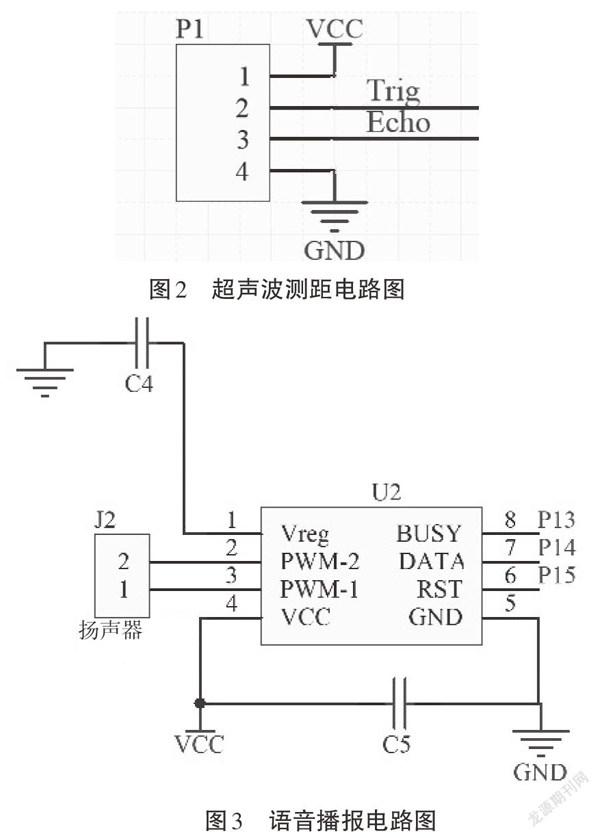
2 超声波测距原理
超声波是频率高于20kHz的声波,由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而常用于距离的测量。超声波测距的原理是由超声波发射器向空间某一方向发射超声波信号,在途中碰到障碍物时,该超声波信号会被反射,声波会立即沿着原路径返回[3]。通过不断检测超声波发射后遇到障碍物所反射的回波,并测出发射和接收回波的时间差[t],然后根据超声波在空气中的声速[v],就能计算出从超声波传感器到障碍物之间的距离。因为超声波经过的距离是声源与障碍物之间距离的两倍,因此声源与障碍物之间的距离[d]可以利用式(1)计算:
[d=12vt] (1)
式中,不考虑误差的室温情况下,超声波在空气中的传播速度是340m/s。
3 系统硬件设计
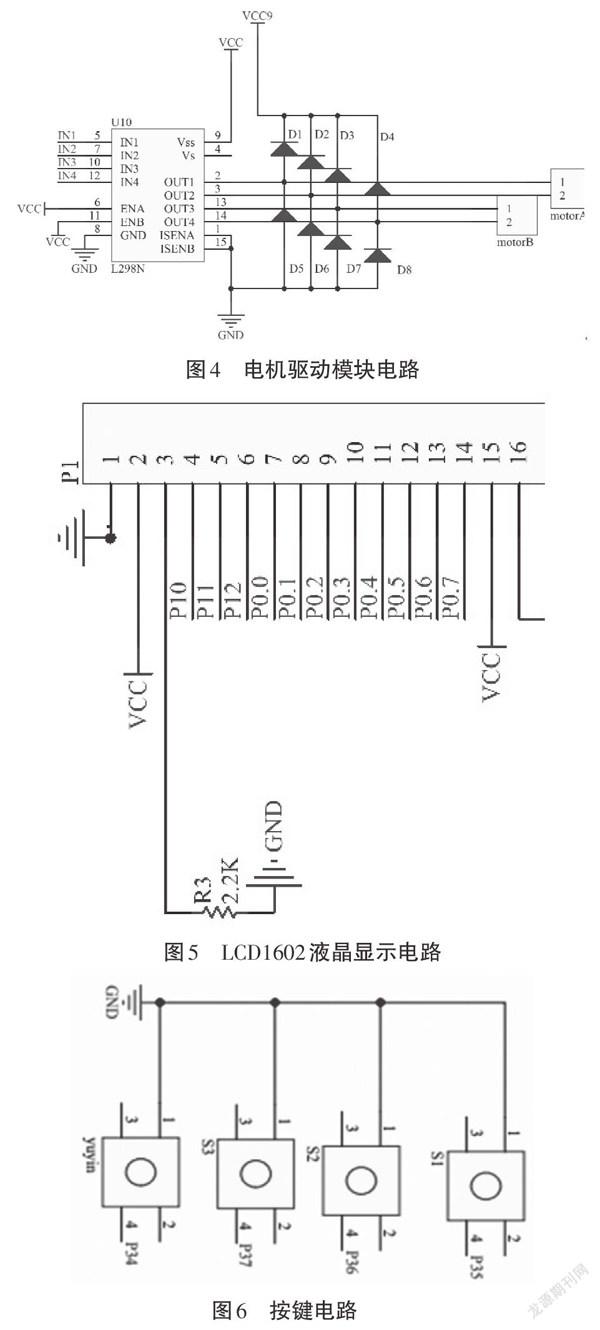
系统控制核心采用AT89S52单片机,AT89S52是片内集成了8kB的Flash程序存储器、128B的RAM、6个中断源和3个定时器的8位单片机,支持在线编程。采用超声波测距模块HC-SR04测距,HC-SR04超声波模块由两个压电陶瓷超声传感器及外围信号处理电路构成。两个压电陶瓷超声传感器,一个用于发出超声波信号,一个用于接收反射回来的超声波信号。HC-SR04的Trig(控制端)引脚控制发出的超声波信号,连接单片机的P3.1引脚,Echo(接收端)引脚接收反射回来的超声波信号,连接单片机P3.2引脚。HC-SR04与单片机的连接如图2所示。采用YWCD-3P-01语音模块语音播报距离,YWCD-3P-01语音模块是一款具有PWM输出的OTP语音标准芯片,共8个引脚,与单片机的连接如图3所示。
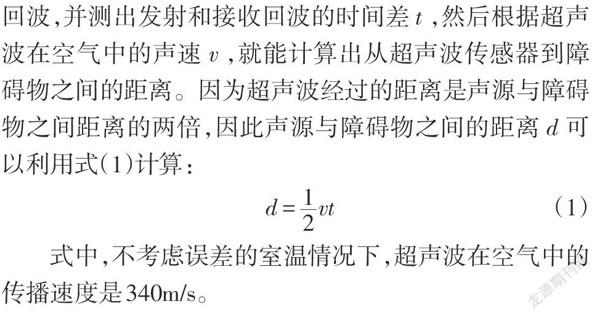
当小车遇到前方障碍物时,采用L298N驱动模块驱动两台直流电机的正反转运动,控制小车前轮的前进和转弯,牵引盲人避开障碍物。L298N驱动模块的引脚IN1、IN2、IN3、IN4分别接单片机的P3.4、P3.4、P3.6、P3.7引脚。L298N电机驱动模块电路如图4所示。采用LCD1602液晶显示器作为显示电路,显示与障碍物之间的实际距离及预设的蜂鸣器报警距离。LCD1602液晶显示电路如图5所示。
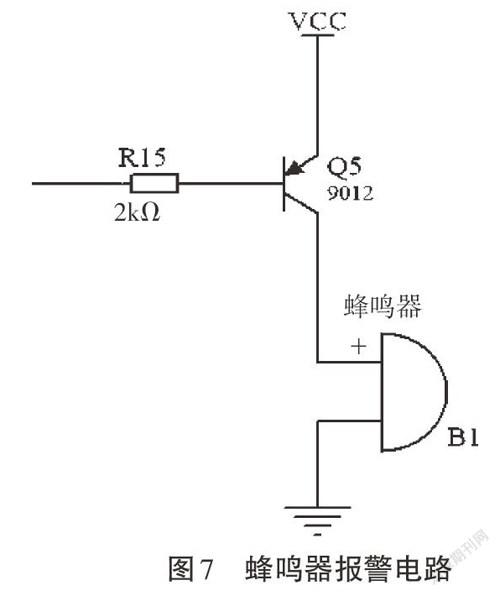
按键电路共设计4个独立按键,其中,接单片机P2.4引脚的按键功能为语音播报启动键。按键S1、S2、S3的功能是对蜂鸣器报警值进行设置,分别接单片机P2.0、P2.1、P2.2引脚,按键电路如图6所示。蜂鸣器接单片机P3.0引脚,当障碍物的距离达到所设定的报警值时,蜂鸣器发声报警,蜂鸣器报警电路如图7所示。
4 系统软件设计
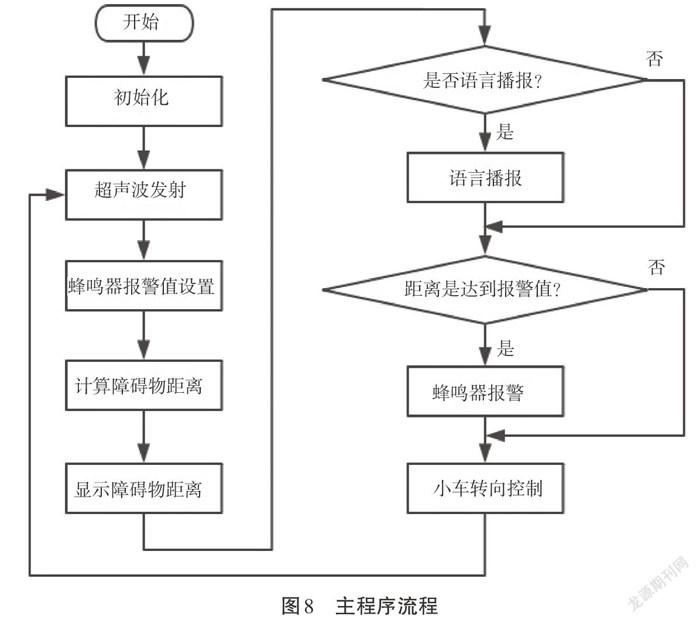
系统软件采用C语言编程,包括主程序、超声波发射子程序、超声波接收中断服务子程序、蜂鸣器报警距离设置子程序、液晶显示子程序、语音播报子程序、小车电机驱动子程序等,实现对障碍物距离的测量、显示、语音播报,蜂鸣器报警提示,控制小车转向,躲避障碍物等自动导盲控制功能。主程序流程如图8所示。
5 结语
本文所设计的自主导盲小车以小车作为动力机构牵引盲人前进,采用超声波测距装置检测障碍物与盲人之间的距离,测距范围为2~400cm,能够满足测量精度的要求,通过语音播报距离和声光报警提示,可提前预警前方的障碍物,使盲人及时避让,避免盲人受到伤害。本设计具有构造简单、运行稳定、测量误差小、反应速度快和成本低廉等特点。
参考文献:
[1]王冠生,郑江华,瓦哈甫·哈力克,等.盲人导航/路径诱导辅具研究与应用综述[J].计算机应用与软件,2012(12):147-151.
[2]金钥.形形色色的导盲系统[J].中国医疗器械信息,1998(4):30-32.
[3]刘为芹,于会山.超声波测距系统的工作原理与应用设计[J].无线互联科技,2015(19):147-148.
