无人机遥感技术在煤堆盘点测量中的应用
2019-09-10吴泽南李存军施浩磊郝华东王金涛
吴泽南 李存军 施浩磊 郝华东 王金涛


摘 要:无人机遥感技术具有自动化、智能化、专业化等优点,将无人机遥感技术应用于煤堆盘点测量上,可以有效解决人工盘点法(属于传统盘煤方式,费工费时,准确度低)和固定式盘煤仪盘煤法(属于新型盘煤方式,造价高,维护成本大)存在的问题。本文通过分析无人机盘煤系统的组成、影像处理的原理、煤堆体积计算的方法,对无人机遥感技术在煤堆盘点测量中的应用进行了初步探索,最后通过现场试验的方法验证其有效性。
关键词:无人机遥感技术;盘煤;影像处理
中图分类号:TB938.3 文献标识码:A 文章编号:1003-5168(2019)32-0039-05
Application of UAV Remote Sensing Technology in
Coal Pile Inventory Measurement
WU Zenan1 LI Cunjun1 SHI Haolei1 HAO Huadong1 WANG Jintao2
(1. Zhoushan Institute of Calibration and Testing for Qualitative and Technical Supervision (National Metrology Testing Center for Bulk Commodity Storage and Transportation Industry),Zhoushan Zhejiang 316013;2. National Institute of Metrology, China,Beijing 100013)
Abstract: UAV remote sensing technology has the advantages of automation, intelligence and specialization. The application of UAV (Unmanned Aerial Vehicle) remote sensing technology in coal pile inventory measurement can effectively solve the problems of the manual inventory method (belonging to the traditional coal inventory method, which is labor-consuming, time-consuming, and has low accuracy) and the fixed coal meter method (belonging to the new coal inventory method with high cost and high maintenance cost). In this paper, by analyzing the composition of unmanned aerial vehicle coal system, the principle of image processing and the calculation method of coal pile volume, the application of UAV remote sensing technology in coal pile inventory measurement was explored, finally, its effectiveness was verified by field test methods.
Keywords: UAV remote sensing technology;coal inventory;image processing
无人机遥感是利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通信技术、POS定位定姿技术、GPS差分定位技术和遥感应用技术,具有自动化、智能化、专业化快速获取空间遥感信息,并进行实时处理、建模和分析的先进技术[1]。近年来,随着无人机技术的快速发展,其所具备高灵活性、低成本、高分辨率数据的快速获取等优势得以体现。将无人机遥感技术应用煤堆盘点测量上,可以有效解决传统盤煤方式(人工盘点法)费工费时、准确度低以及固定式盘煤仪盘煤法造价高、维护成本大等问题,为煤矿、港口、燃煤火力发电厂储煤量的盘点提供优秀解决方案。无人机盘煤技术的原理如下。
1 无人机航拍系统
无人机航拍系统主要是通过无人机搭载高清相机获取地面影像数据。无人机航拍系统的组成如图1所示,主要包括飞行平台、飞行控制与地面监控系统以及高清相机等。
飞行平台可分为单旋翼无人机、固定翼无人机、多旋翼无人机和伞翼无人机等。多旋翼无人机具有良好的机动性和一定的负载能力,是煤堆盘点的良好选择。无人机搭载的高清相机一般有单相机、两相机、四相机和五相机等,单相机常应用于垂直摄影,多相机常应用于倾斜摄影。无人机通过连续重叠的地面拍摄,自动记录高精度POS姿态信息、GPS坐标信息、相机云台的角度信息,获取一组具有坐标姿态信息的地面煤堆航拍照片。通过对原始航拍照片数据的一系列交会解算,人们可以得到地面煤堆表面的三维点云坐标和三维模型。
2 飞行路径规划
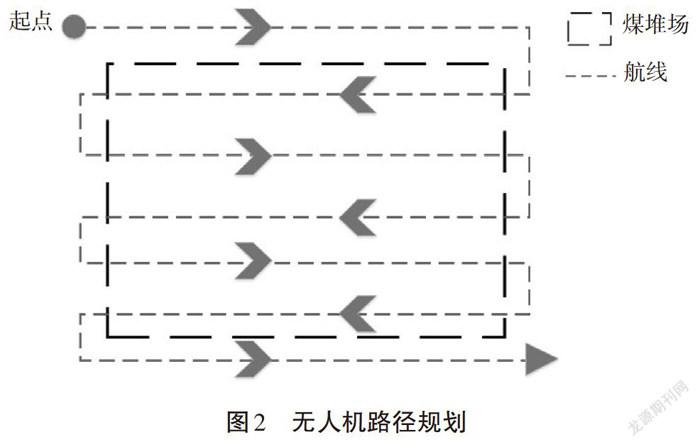
目前,多数无人机具备自动导航功能,操作人员综合考虑无人机飞行平台、影像分辨率、测区范围、航高、设计航线、旁向重叠度和航向重叠度等因素规划飞行路径。如图2所示,无人机从煤堆场的一端沿直线往另一端飞行,到场地边缘后自动转弯后平行飞回,如此往复,测完整个堆场,同时使相邻两张照片保持旁向重叠度和航向重叠度。
3 地面控制点布置
为了提高结果数据的精度,宜在地面设置照片控制点,根据《低空数字航空摄影测量外业规范》(CHZ 3004—2010),像控点应按照以下原则进行布设[2]:像控点对应的目标影像应清晰,并根据航线在整个测量区域统一布设;高程控制点点位目标应选在高程起伏较小的地方,布设在同一位置的平面点和高程点宜连接成平高点;像控点的布置应避开小于照片边缘1cm位置;控制点采用GPS方法测量时,应避免被电磁干扰。
由于外业作业劳动强度大,照片控制点的布设方案通常采用非全野外布点的方法,即测量少量的外业控制点,采用空三加密方法,经过平差处理,解求所有待定点的平面和高程坐标[3]。采用区域网布点的方案,利用GPS RTK卫星快速定位的测量方法获取像控点的高精度坐标,对于无RTK信号的地方,可采用全站仪方式测量。在区域网周围布设较多的平高点,如图3所示。
4 影像匹配
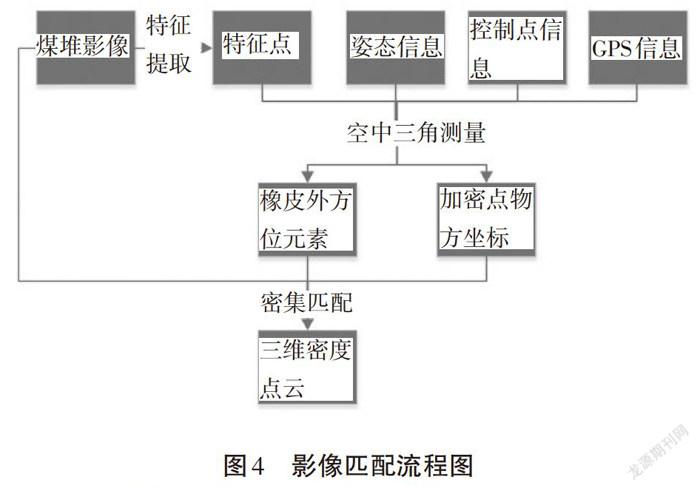
无人机通过连续重叠的地面拍摄,获得煤堆的影像资料,通常,一个航次可以获得上千张照片,对这些影像的匹配是关键步骤。如图4所示,通过特征匹配提取煤堆影像特征点,根据特征点、控制点、姿态数据和GPS数据等信息,经过空中三角测量,获取每张照片的外方位元素和所有加密点的物方坐标,最后经过密集匹配,获取三维密集点云数据。
4.1 特征提取
特征提取的方法很多,其中尺度不变特征变换算法(Scale Invariant Feature Transform,SIFT)[4]具有良好的不变性、强大的数据描述能力以及较强的可扩展性等优点,是目前最常用的特征提取方法之一。SIFT算法的流程如下。
4.1.1 多尺度空间模拟。构建尺度空间,模拟图像数据的多尺度空间。利用高斯卷积核,将二维图像的尺度空间定义为:
(1)
式中,[G(x,y,δ)]为尺度可变高斯函数。
(2)
为了有效地在尺度空间检测到稳定的关键点,本研究提出了高斯差分尺度空间(DOG scale-space),利用不同尺度的高斯差分核与图像卷积生成,建立图像金字塔。
(3)
4.1.2 高斯差分特征点检测。对于每个采样点与其相邻所有点,比较像域和尺度域的大小,如果该采样点在高斯差分尺度空间本层及上下层26个相邻点中为极值,则该点为该图像尺度下的特征点。
4.1.3 提取稳定关键点。通过拟合三维二次函数以精确确定关键点的位置和尺度,同时去除低对比度的关键点和不稳定的边缘响应点,以增强匹配稳定性、提高抗噪声能力。
4.1.4 赋予关键点方向参数。利用关键点邻域像素的梯度方向分布特性为每个关键点指定方向参数,使算子具备旋转不变性。
4.1.5 关键点描述子生成。通过上述步骤关键点获取位置、尺度和方向信息,将这些信息的关键点通过一组向量描述出来。
4.2 空中三角测量
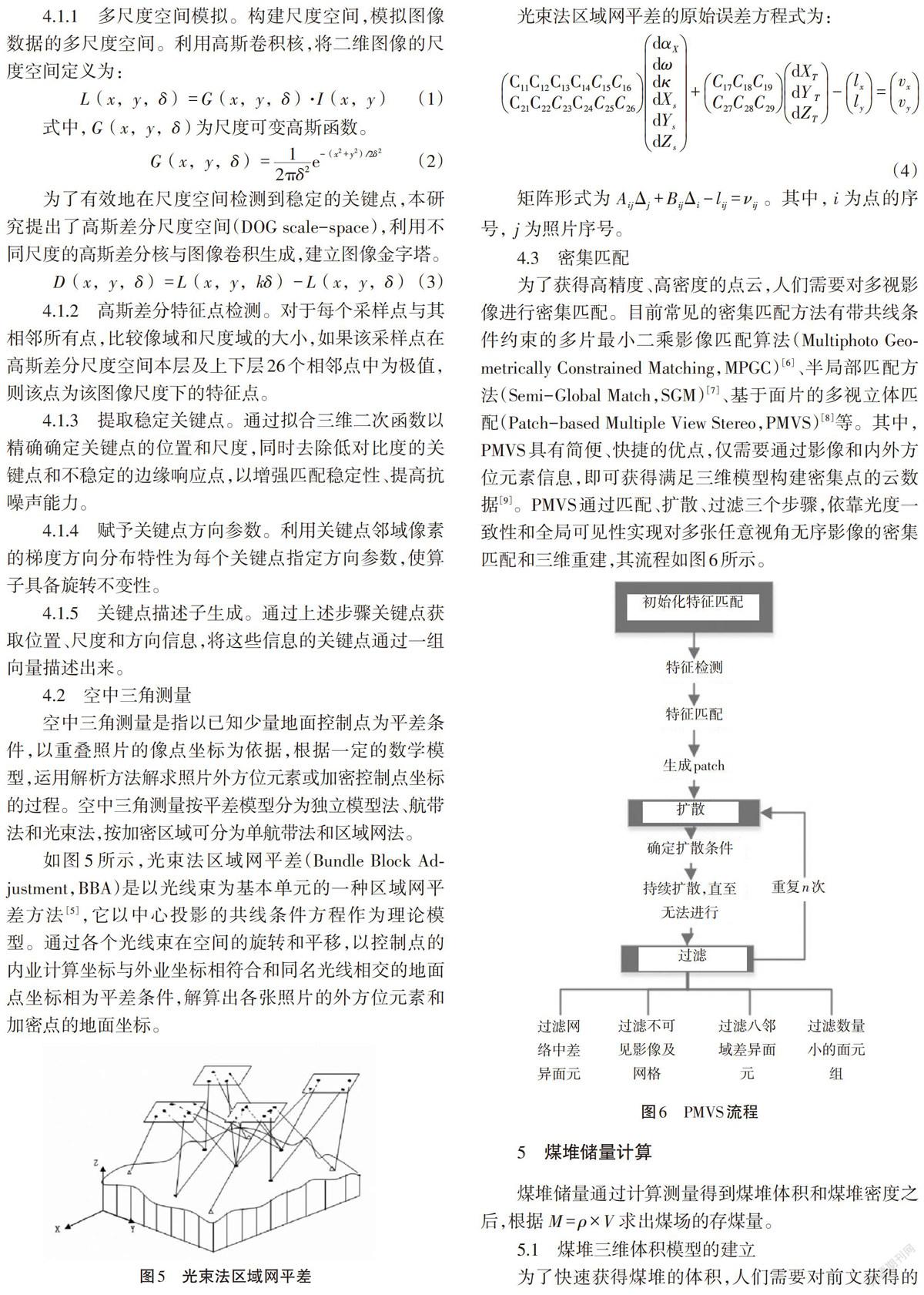
空中三角测量是指以已知少量地面控制点为平差条件,以重叠照片的像点坐标为依据,根据一定的数学模型,运用解析方法解求照片外方位元素或加密控制点坐标的过程。空中三角测量按平差模型分为独立模型法、航带法和光束法,按加密区域可分为单航带法和区域网法。
如图5所示,光束法区域网平差(Bundle Block Adjustment,BBA)是以光线束为基本单元的一种区域网平差方法[5],它以中心投影的共线条件方程作为理论模型。通过各个光线束在空间的旋转和平移,以控制点的内业计算坐标与外业坐标相符合和同名光线相交的地面点坐标相为平差条件,解算出各张照片的外方位元素和加密点的地面坐标。
光束法区域网平差的原始误差方程式为:
(4)
矩阵形式为[AijΔj+BijΔi-lij=νij]。其中,[i]为点的序号,[j]为照片序号。
4.3 密集匹配
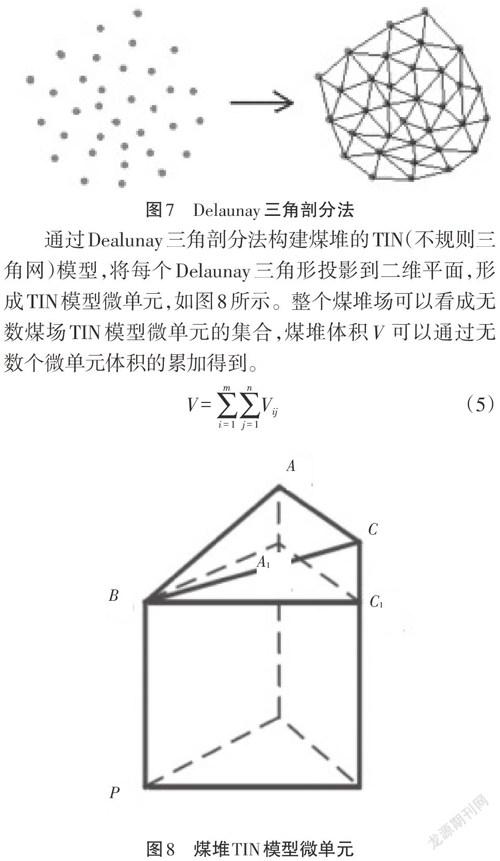
为了获得高精度、高密度的点云,人们需要对多视影像进行密集匹配。目前常见的密集匹配方法有带共线条件约束的多片最小二乘影像匹配算法(Multiphoto Geometrically Constrained Matching,MPGC)[6]、半局部匹配方法(Semi-Global Match,SGM)[7]、基于面片的多视立体匹配(Patch-based Multiple View Stereo,PMVS)[8]等。其中,PMVS具有简便、快捷的优点,仅需要通过影像和内外方位元素信息,即可获得满足三维模型构建密集点的云数据[9]。PMVS通过匹配、扩散、过滤三个步骤,依靠光度一致性和全局可见性实现对多张任意视角无序影像的密集匹配和三维重建,其流程如图6所示。
5 煤堆储量计算
煤堆储量通过计算测量得到煤堆体积和煤堆密度之后,根据[M=ρ×V]求出煤场的存煤量。
5.1 煤堆三维体积模型的建立
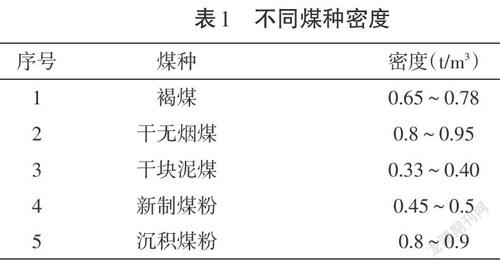
为了快速获得煤堆的体积,人们需要对前文获得的密集点云数据进行进一步处理,将散乱点云数据转换为三维体积模型,通常使用的是三角剖分方法,将散点集剖分成不均匀的三角网络,满足“最大化最小角”及“空圆性质”的特性,最终使其具有“最接近”“唯一性”“最优性”“最规则”“区域性”和“具有凸多边形的外壳”等优异特性,这就是Delaunay三角剖分算法(Delaunay Triangulation,DT),如图7所示。
通过Dealunay三角剖分法構建煤堆的TIN(不规则三角网)模型,将每个Delaunay三角形投影到二维平面,形成TIN模型微单元,如图8所示。整个煤堆场可以看成无数煤场TIN模型微单元的集合,煤堆体积[V]可以通过无数个微单元体积的累加得到。
5.2 煤堆自然堆积密度测量
煤堆的自然堆积密度往往不是一个固定值,如表1所示,不同煤种的密度不尽相同,即使同一煤种也会因其堆煤方式、含水量等不同而不同。因此,需要对煤堆的自然堆积密度进行测算。
通常采用模拟法,根据《商品煤样人工采取方法》(GB 475—2008)的采样方法并按照《煤炭堆密度小容器测定方法》(MT/T 739—2011)的要求,对煤堆各部位进行密度测量,并按照其占比计算权重,从而计算煤堆的自然堆积密度,结合煤堆体积量,计算煤堆存量。
6 现场试验
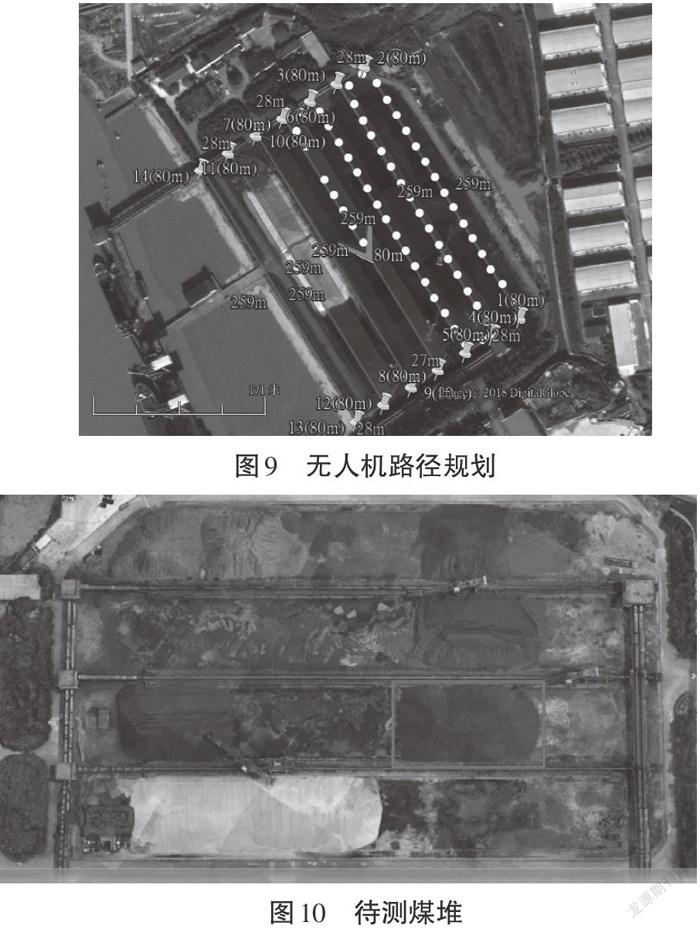
使用无人机搭载单个相机对舟山某码头煤堆场存量进行现场盘点试验。其中,无人机选用的是DJI四旋翼无人机,最大起飞重量为4.25kg,水平飞行速度最大可达26m/s,下降速度最大可达9m/s,可承受风速最大可达10m/s;相机采用2 000万像素级航拍相机。
飞行结束后进行数据处理,并与传统测量方法进行比较,以验证其有效性。如图9所示,按设计航线对图10所示的一组煤堆存量进行测量。实际飞机时间为20min。
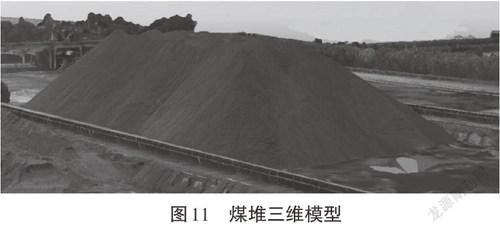
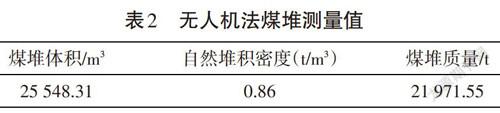
经过影像匹配等一系列数据处理,生成密集点云图,选取需要计算的煤堆(图10标记区域),构建三角网格,生成三维模型(见图11),计算图示煤堆体积,测量其密度,从而得到煤堆质量,如表2所示。
将无人机法测量值与传统皮带秤法测量值比较,传统皮带秤法测量值为21 736t,相对偏差为1.1%。下面分析产生较大偏差的原因。
一是煤堆的自然堆积密度测量通过对各部位煤堆密度加权平均的方法测得,其权值往往需要估算,目前也没有特别准确的方法测量煤堆的自然堆积密度,即使偏差为0.1t/m3,对于煤堆存量的偏差影响也高达1.2%。二是平面精度、高程精度、长度精度等都是影响三维建模精度的因素,其中高程精度的影响最大。GPS RTK的高程精度为厘米级,经计算,煤堆下底面的高程值下降1cm,煤堆的体积计算结果增加0.1%,因此,煤堆底面的高程值准确与否直接关系到煤堆体积精度。三是煤堆场地面由于地基沉降不均等原因,往往不是绝对的平面,存在凹凸不平的情况,而在煤堆体积计算时,通常将煤堆下底面模拟成平面,因此产生了误差。四是堆煤经过堆放,含水量发生变化,因此导致煤堆质量发生变化。
7 结论
将无人机遥感技术应用到煤堆盘点测量中,可以有效降低成本,提高效率,同时保证一定的测量准确度。下一步应探索准确测量煤堆自然堆积密度的方法,同时提高无人机三维建模精度,从而提高无人机煤堆盘点准确度。
参考文献:
[1]李德仁,李明.无人机遥感系统的研究进展与应用前景[J].武汉大学学报(信息科学版),2014(5):505-513.
[2]国家测绘局.低空数字航空摄影测量外业规范:CH/Z 3004—2010[S].北京:中国标准出版社,2010.
[3]袁修孝,李德仁.GPS辅助空中三角测量的若干探讨[J].测绘学报,1997(1):14-19.
[4]Gruen A.Development and Status of Image Matching in Photogrammetry[J].The Photogrammetric Record,2012(137):36-57.
[5]王之卓.摄影测量原理[M].武汉:武汉大学出版社,2007.
[6]Baltsavias E.Multiphoto Geometrically Constrained Matching[M].Zuich:Mitteilungen,1991.
[7]Hirschmueller H.Accyrate and Efficient Stereo Processing by Semi-Global Match[C]//Conference on Computer Vision & Pattern Recognition.2005.
[8]Furukawa Y,Ponce J.Accurate,Dense,and Robust Multi-view Stereopsis[J].Pattern Analysis & Machine Intelligence,2010(32):1362-1376.
[9]蔡龍洲.面向无人机长序列图像的数字表面模型研究[D].焦作:河南理工大学,2012.
