桥式起重机电磁旋转挂梁结构设计
2019-09-10翟杰张伟
翟杰 张伟
【摘 要】通用桥式起重机是工业厂房和室外原材料堆场常规配置的特种起重机械,广泛应用于造船、冶金、建筑、钢结构制造等行业。有学者对桥式起重机的主梁结构优化、参数化建模等方面进行了较为深入的研究。但是,随着桥式起重机应用的深入,各类特殊的桥式起重机产品的需求逐步显现,以提高货物调转与运输的效率,降低了货物搬运过程中人力与物料消耗。
【关键词】桥式起重机;电磁旋转挂梁;结构设计
1桥式起重机参数介绍
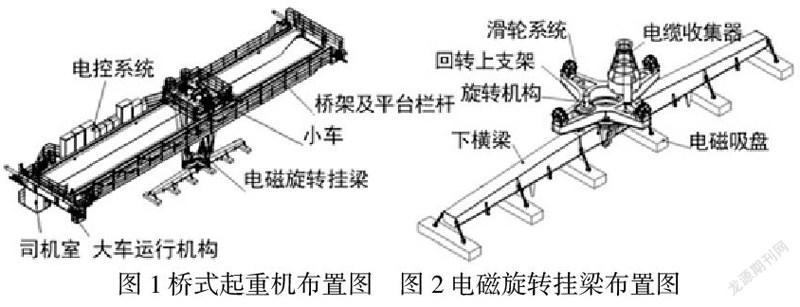
研究的桥式起重机用于船厂露天钢板材料堆场,额定吊重14t,工作级别A6,起升高度7m,大车运行速度8~80m/min,小车运行速度4~40m/min,起升速度1~10m/min。主要组成为:桥架及平台栏杆、大车运行机构、司机室、小车、电磁旋转挂梁系统和电控系统等。布置图如图1所示。整机主要结构件材料选用Q235B。
1.2电磁旋转机构功能分析
钢板材料堆场需要频繁的向各个车间转运,由于空间和运输工具的限制,钢板在转运的过程中需要调整长度和宽度方向,以满足各种运输设备的要求。旋转电磁挂梁机构,可以在钢板起吊脱离地面后,实现水平任意角度旋转,提高钢板吊装的效率。电磁旋转机构的主要组有滑轮系统、回转上部支架、回转机构、下横梁、电磁吸盘和电缆收集器等部件,如图2所示。六块电磁吸盘用于钢板的抓取。电磁旋转机构通过滑轮、钢丝绳与上小车连接,实现电磁旋转系统的整体升降。回转上支架与下横梁通过回转电机与回转支承组成的回转系统连接,实现相对旋转运动。电磁旋转机构的基本参数为:旋转速度0.8~1r/min,单块电磁吸盘最大吸力3吨,停电保磁时间大于20min。
图1桥式起重机布置图 图2电磁旋转挂梁布置图
2桥式起重器吊物摆动现象的原因
桥式起重机吊物提升运动主要依靠钢丝绳索类柔性体完成活动,其特点是轻便,大大提高了工作效率,但是在桥式起重机工作过程中,可能由于惯性作用或加速、减速,绳索并没有较好地固定在吊物的负载压力下,易形成以绳索长度为半径的摆动,会发现随着吊物重量的增加,摆动的幅度会相对较小,这均可以通过单摆公式分析可得。其实吊物的摆动与质量并不能直接控制摆动幅度,只与钢丝绳索长短有关。因此,可以依据吊绳长短合理设置桥式起重器摆动措施。
3桥式起重机优化措施分析
3.1电气防摇摆措施
目前,桥式起重机电气防摇摆系统的发展随着不同种类的控制器、变频技术的应用也得到了长足稳定发展。电气防摇摆控制系统的原理是对小车运动与吊物运动中形成的夹角进行测量计算。通过加减速进行控制吊物的摆动,经过不断实验,当小车达到某一速度或静止不动时,吊物与吊架的夹角基本呈垂直状态,吊物的摆动幅度较小将成功消除摆动问题。我国在众多的电气防摇摆控制技术中应用最多的是借助开环控制系统和闭环控制系统,相比之下开环控制系统较为方便,开环控制系统又称无反馈控制系统,是指一个输出只受系统输入控制,没有反馈回路的系统,在活动时无需每次反复测量吊架与吊物之间的角度,只需利用统计好的数据控制起重机便可,这种系统输入直接控制输出,装置较为简单,成本低,具有良好的稳定效果。闭环控制系统是由信号正向通路和反馈通路构成闭合回路的自动控制系统,又称反馈控制系统,相比开环控制系统工作程序要复杂一些,施工人员要测量摆角,虽然准确率高,但是控制操作复杂,投入成本较高。因此桥式起重机多采用开环控制系统,只要设置精准的数据,接下来的工作便能够高效地将数据传输给变频器,提高防摆效果。一般来说,在行车加减速的过程中,由于行车速度总是优先于吊物運动速度,行车与吊物之间形成夹角,在重力作用下形成摆动现象。电气控制摇摆的方法就是利用这个原理,先统计小车与吊物之间夹角角度,通过测量工具计算钢绳长度,然后通过计算摆动周期等使小车在特定距离减速行驶。通过反复快速调整小车运动速度,平衡行车与吊物的速度,使吊物绳索的中心与荷载物中心位置在一条直线上,消除之间的夹角产生,便可有效消除偏摆问题,使吊物平稳快速运行。
3.2车轮轨道故障的维修保养措施
根据桥式起重机车轮轨道的常见故障原因,为能够有效避免车轮轨道的故障发生,在日常的使用过程中,需要采取适当的预防和防范措施。首先,为有效缓解车轮轨道形变,需要改变原有车轮制作方法,选取合适的车轮制作材料;其次,为确保车轮轨道运行顺畅,降低运行过程中的摩擦力,需要在桥式起重机日常运行中,给相应的车轮轨道一定的润滑保护。例如在车轮轨道上定期涂抹石墨材料,提升润滑度,降低轨道的形变概率;最后,为更好确保桥式起重机运行过程中的稳定性,可以通过分别驱动的方法避免出现传动误差的现象。与此同时,还需要在实际运行中对大车以及小车的运行速度加以限制和控制,有效降低车轮轨道的故障发生概率。
3.3分析智能路径规划方法
智能化的路径规划方法包括模糊逻辑算法、遗传算法、蚂蚁群算法、神经网络算法。详细分析模糊逻辑算法,首先对外界环境有敏锐的感知,然后做出对应的动作处理,模糊逻辑算法使得路径规划工作过程中建立起相对精确的数学模型。分析遗传算法,一般在面对复杂问题的时候,借助遗传算法往往能够得到优化答案。工程问题要想优化借助该种算法再合适不过,优化问题的前提是熟悉掌握问题的本质,目标函数就是数组生存的外界环境,各大约束条件就是满足的环境特性,数据在目标函数环境域中呈现理想化的特性的时候,数据就被环境域接受。蚁群算法。个体独立后,释放信号,方便后来者的追踪,信息素随着时间的推移慢慢变淡,路径会被后来的蚂蚁追踪,代表路径相比较其他路径是优化路径。而后来者越来越少,一直到该路径被淘汰,则证明该路径不是最优化路径。算法的深入展开,信息素浓度越来越大,算法收敛与信息素浓度最大的元素上。借助蚁群算法,能够快速实现最优化路径的选择,弥补了传感器误差导致的探测信息的模糊性缺点。
结语
基于有限元分析法估算桥式起重机焊接箱形梁的裂纹扩展寿命,具有简便实用的特点。该法不仅可以估算焊接结构的剩余疲劳寿命,而且可以推算出具有初始缺陷的焊接结构裂纹扩展任一阶段时的疲劳寿命。但基于有限元法分析裂纹处的应力,以此来估计疲劳寿命,由于裂纹的随机性和现场情况的复杂性,估算起重机的疲劳寿命可能存在误差,有待于结合起重机疲劳试验做进一步的深入研究和应用。
参考文献:
[1]高新辉,李红军.桥式起重机的常见故障与维修保养研究[J].铜业工程,2018(5):98-100.
[2]蔡永乐.桥式起重机的常见故障与维修保养[J].四川水泥,2018(3):18.
[3]胡博.桥式起重机的常见故障与维修保养[J].中国设备工程,2017(18):36-37.
(作者单位:1.山东丰汇设备技术有限公司;
2.中国电建集团山东电力建设第一工程有限公司)
