一种仿人竞速机器人的结构和控制设计
2019-09-10鲁攀黎显吕海岗李永祥
鲁攀 黎显 吕海岗 李永祥


【摘 要】随着传感器检测技术与控制技术的高速发展,仿人机器人将在工业和家庭中得到广泛应用,本项目将设计一个具有自动检测黑白线功能的自主寻迹仿人竞速机器人。可以模仿体育场上运动员的中短距离赛跑,机器人从起跑线出发,在类似环形赛道上直立行走快速行进一圈到达终点线后停止。具体控制原理如下:核心控制板基于Arduino系列单片机,各部件及转动部分以数字舵机来驱动,识别及分辨路线通过光电传感器检测来实现。
【关键字】Arduino;光电传感器;数字舵机
1、仿人机器人简介
仿人机器人是当今机器人研究领域的研究热点之一,大量学者都研究这一课题。该设计所研究的仿人竞速机器人,可以模仿人类双足直立行走,并要求其头部、手臂有协调的配合功能,再辅助以各类传感器,以使得该仿人机器人能够自主识别周围环境,快速灵活的完成竞速行走功能。
在机器人行走的过程中,就需要机器人具有较高的双足行走机动性能和可靠的传感控制性能。因此,从优化传感器和数字舵机的安装布局入手,设计出合适的机器人结构,开发所需自由度较少、但机动性强、传感灵敏可靠并且性价比高的仿人竞速机器人具有重要的意义。
2、机械结构设计
仿人竞速机器人的机械结构采用人性结构,如图1所示,在各个关机处安装有数字舵机,舵机可以带动相应部位摆动。通过合理的控制算法可以控制多个舵机同时工作完成机器人腿部的抬起,迈出和落地,接着以该腿部为支点使得另外一条腿进行抬起,迈出和落地动作完成机器人的行走运动。在机器人行走的过程中,需要保持机器人的平衡性,因此机器人在行走过程中需要想人行走一样具有手臂摆动的动作,这样可以维持平衡,完成流畅快速的行走。
机器人在行走过程中难免会遇到障碍,在这里以黑色胶带表示障碍,当机器人踩到黑线时,布置在其脚部的光电传感器会检测到信号,这时机器人对应的左转和右转动作,当机器人绕过障碍时可以继续前行,直至到达终点线完成任务。
图1 仿人竞速机器人结构展示
3、控制系统设计
为了实现对多自由度复杂结构的仿人竞速机器人的动作控制,需要较多控制路数的舵机控制板,仿人机器人系统的软件采用了C语言编程,程序是采用Arduino IDE软件编写,该软件提供了丰富的库函数和供能强大的集成开发调试工具,可以完成编辑,编译,连接,调试,仿真等能够实现整个开发流程。
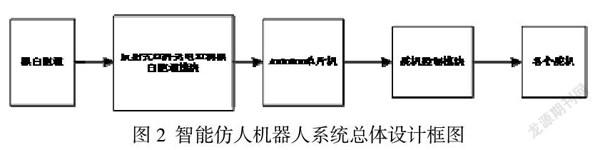
黑白跑道具有明显的色差,光电传感器会不间断发射红外线并向Arduino控制器发射信号,当Arduino探测到机器人接近或者踩到黑线时,向舵机控制模块发送信号控制舵机运动使得机器人完成左转或者右转动作实现躲避障碍物的功能。如图2示。
图2 智能仿人机器人系統总体设计框图
程序设计中需要在主函数中编写多条判断语句,判断语句的执行部分皆为子函数。当判断若无障碍物执行语句中的行走子函数,有障碍执行判定中的左转或右转子函数,从而完成对机器人行进中的避障功能。其中控制板的定时器会每隔5ms检测红外数据,根据数据不同来对判断语句中的判断条件执行相应的指令,进而达到仿人竞速机器人的行进。
仿人竞速机器人的软件设计构思大致思路如图3所示:
图3 控制流程图
4、展望
仿人机器人具有与人类最为相似的外观,未来将会在人们的生活中扮演更加重要的角色,代替人们完成一些危险的的工作。并具其还在很多方面有扩展的能力,正逐渐在服务,医疗,教育,娱乐等多个领域得到广泛应用。相信仿人机器人在未来会给人类带来更巨大的惊喜。
参考文献:
[1]于建均,李晨,左国玉,阮晓刚,王洋.仿人机器人步态平衡泛化模型的建立与仿真[J/OL].智能系统学报:1-9[2020-03-07].http://kns.cnki.net/kcms/detail/23.1538.TP.20200305.0947.002.html.
[2]施群,吕雷,谢家骏.可变环境下仿人机器人智能姿态控制[J/OL].机械工程学报:1-9[2020-03-07].http://kns.cnki.net/kcms/detail/11.2187.TH.20191224.1509.170.html.
[3]吴峰华,杨哲海,张玉萍,王昊,刘实,尹竞瑶,金鑫,王承业,盖宇.仿人足球机器人快速多目标识别方法[J].计算机辅助设计与图形学学报,2019,31(12):2152-2165.
[4]吴悦.仿人机器人的设计与竞赛应用[J].电子世界,2019(23):136-137.
(作者单位:河南理工大学 机械与动力工程学院)
