惯性测量装置敏感元件组合减振改进设计研究
2019-09-10罗小秋
罗小秋


【摘 要】通过对某型动力调谐陀螺惯性测量装置试验数据进行分析,得到了该型惯性测量装置在振动试验过程中存在较大的附加角速度信号,对载体控制回路存在一定的影响。针对此现象,对惯性测量装置中角速度测量元件的减振方案进行了说明,并通过试验确定了附加角速度的产生是由于惯性测量装置内部动力调谐陀螺的减振系统所致。提出了改进敏感元件组合减振设计来抑制惯性测量装置减振系统中附加角速度的产生,并通过试验的方法验证了其可行性,达到了很好的效果。
【关键词】惯性测量装置;减振设计;敏感元件组合
1 概述
惯性测量装置在其载体振动试验过程中,由于载体自振和其它动力设备工作会造成载体发生一定频率的振动,如果振动频率信号与载体其它设备有用信号的频率接近时,将导致频率信号互相混合,干扰载体其它设备正常工作,从而对弹上控制系统带来影响,后果严重时还会导致载体失控任务失败。因此,敏感设备在载体工作过程中,一定要对固定频率的信号进行有效抑制,使其能量远远小于系统所需信号的能量,保证载体其它设备输出信号不受干扰,提高系统控制的稳定性。
惯性测量装置采用减振设计是为了保护敏感元件在良好力学环境条件下工作,近而到达较高的测量精度和工作可靠性。然而,在减振系统中,由于敏感元件系统和惯性测量装置壳体采用了弹性连接减振方式,致使敏感元件系统在由弹体有振动输入的情况下,产生附加角速度,影响惯性测量装置角速度的测量精度,通过控制解算后,输出虚假的控制信号,造成控制系统失稳。
2 附加角速度产生机理
2.1 试验数据分析
惯性测量装置在参与载体振动试验过程中,其输出的角速度信号在不同时间段叠加了不同频率信号,如图1所示,图中只取了试验过程中的30秒的数据进行分析。
将以上数据进行频谱分析,可知在角速度信号中主要混杂有44Hz、48Hz和91Hz频率的信号,角速度通道最大峰值达到9(°)/s。在该时段内,载体在空间各种环境应力的综合作用下,致使惯性测量装置中的敏感元件系统在弹性力和惯性力作用下,出现了40Hz以上的振动信号,而惯性测量装置角速度通道对该振动信号敏感并放大,在角速度通道输出信号中叠加了虚假的角速度信号,该虚假的角速度信号经控制回路形成的虚假的舵控制指令,控制舵面偏转,造成控制系统出现短时振荡,从而影响载体控制回路的稳定性。
2.2 减振系统设计方案介绍
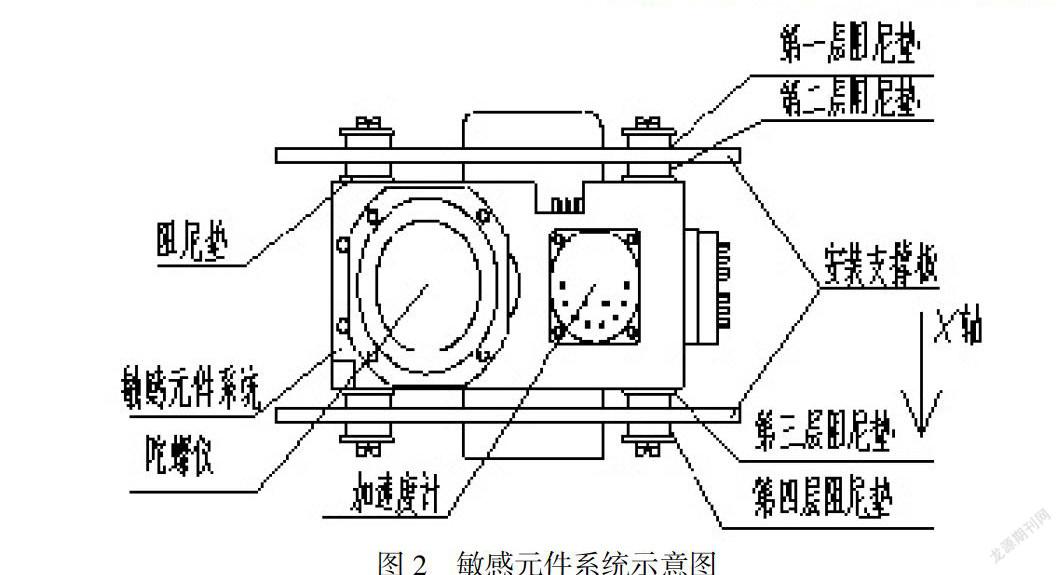
该型惯性测量装置的设计方案采用动力调谐陀螺作为角速度测量元件,石英挠性加速度计作为线运动测量元件,由于动力调谐陀螺抗力学环境性能较差,因此对陀螺仪采用了减振设计技术,使陀螺仪能经受较强的力学环境条件。惯性测量装置与导弹直接固联,内部对陀螺仪和加速度计安装在专用的敏感元件支架中,构成敏感元件系统,最后通过8对专用的阻尼垫实现与惯性测量装置壳体的弹性连接,达到局减振的目的,减振系统方式如图2所示,在设计过程中使减振系统的刚度中心与质量中心重合,抑制敏感元件系统在动态环境下产生较大的角位移和角振动,致使弹体振动冲击时高频部分的绝大部分能量在减振环节中被阻尼吸收、消耗掉。
2.3 附加角速度产生过程
2.3.1 产生原理分析
由于惯性测量装置与导弹采用直接固联的安装方式,因此,当载体有较强的振动信号输入时,振动能量通过弹体直接传递至惯性测量装置结构本体,惯性测量装置通过内部减振系统吸收了大部分振动能量,保证了陀螺仪正常稳定工作。
由于减振系统是通过上下支撑板(如图2中所示)与惯性测量装置壳体进行弹性连接,因此,弹性连接的中间部分敏感元件系统,可近似为单自由度振动系统,当该系统有周期性干扰外力作用时,自身也会产生与周期外力同频率的强迫振动,由于敏感元件系统与支撑板的弹性连接方式,敏感元件系统所敏感到的强迫振动会在惯性测量装置的三个方向上形成周期性的挠性摆动,该摆动过程中所生的运动即为减振系统中的附加角速度,其产生原理如图3所示。当周期性干扰外力去除后,敏感元件系统恢复力仍维持振动,所以,该附加角速度也会相应的维持一段时间。
敏感元件系统中的陀螺仪是角速度测量元件,具备角运动测量功能,因此,附加角速度所引起的挠性摆动肯定会被陀螺仪所敏感,输出固定频率的角速度信号。该角速度信号由于是敏感元件系统挠性摆动而产生的,并不是载体真实的角运动体现,所以,该角速度信号为虚假信息,当陀螺仪所敏感到的该虚假角速度信息达到一定的数值后,在控制解算后,就必然导致输出错误的控制指令,造成载体偏离控制。
2.3.2 试验情况
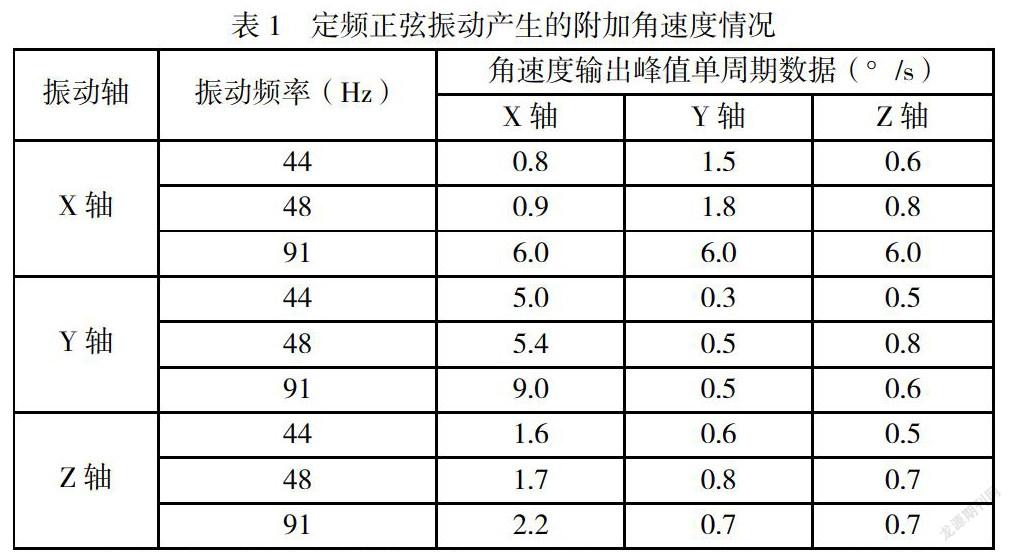
通过上述分析可知,惯性测量装置减振系统中存在一定的挠性摆动,致使陀螺仪敏感到角速度信息,这种情况还可以通过振动试验进一步验证,将该型号惯性测量装置安装在振动台上,分别对惯性测量装置X、Y和Z轴进行定频正弦振动试验,振动过载幅值为3g,频率点分别为44Hz、48Hz和91Hz,惯性测量装置角速度通道带宽为85Hz,其角速度通道所测得的附加角速度值详细情况见表1。
通过表1的数据可以看出,在沿惯性测量装置Y轴输入91Hz正弦振动试验过程中,X轴输出的附加角速度为9(°/s),这与载体试验过程中所出现的现象相符。
3 抑制附加角速度的方法
3.1 改进减振设计
3.1.1 改进方案
从惯性测量装置的减振原理分析,在系统使用力学振动环境不恶劣的情况下,可以适当降低减振强度,提高减振系统与惯性测量装置本体结构连接处的轴向和径向刚度,对减振系统采用局部改进的方式实现。
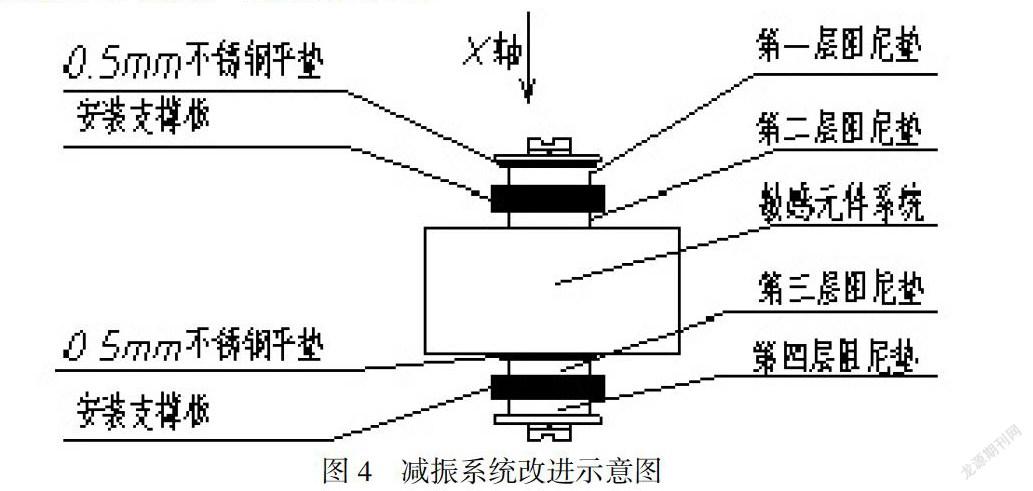
针对减振系统的改进措施,在惯性测量装置系统中进行了大量的振动试验,采用了多种减振系统的改进措施,经过对试验数据分析论证,确定了如图4所示的改进措施,即在减振系统中的第一层和第三层之间增加0.5mm不銹钢平垫,使敏感元件组合与惯性测量装置之间的连接具备一定的钢度,阻止敏感元件系统由于外部振动引起的挠性摆动。
3.1.2 试验验证
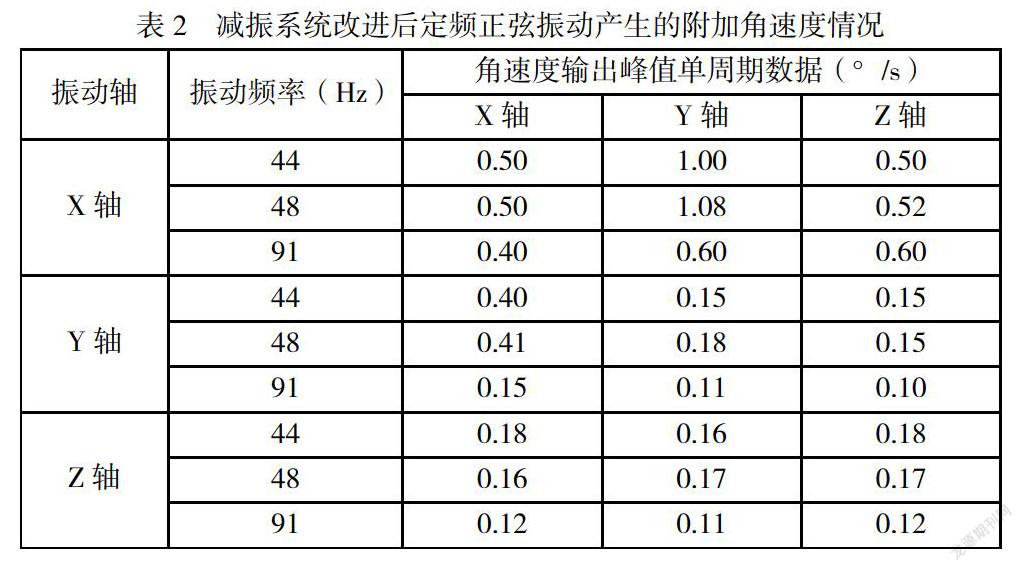
根据上述分析结果,对减振系统进行了图4所示的改进措施,重新进行定频正弦振动试验,试验方法与2.3.2相同,试验结果详见表2。
从表2数据分析可知,与改进前相比,在同样的正弦振动条件输入的情况下,在减振系统引起的附加角速度最大为1.08(°/s),远小于未改进前9(°/s)的附加角速度,有效地抑制了减振系统中附加角速度的产生。
4 结论
惯性测量装置敏感元件组合改进减振设计技术经过试验验证,有效抑制减振系统中虚假的附加角速度的产生,既保证了敏感元件系统的减振效果,又未使惯性测量精度受到损失,有效解决了前期减振振系统设计的不足。
参考文献:
[1] 王心清.结构设计.北京:宇航出版社.1994年12月.
(作者单位:贵州航天控制技术有限公司)
