处理消像旋的数字控制方法
2019-09-10张冬生刘杰
张冬生 刘杰
摘要:针对目前周视式光电观察瞄准系统中机械连杆传动装置以实现光学消像旋的情况,提出并改造了原有的传动系统,建立系统数学模型,对控制系统的典型情况进行仿真。仿真结果表明,该设计数字控制硬件平台能够满足精度和实时性能指标的要求,提高了系统的稳定性和可靠性。
关键词:消像旋;位置传感器;直流电机;位置控制器;仿真
引言
在许多潜望式周视光电观瞄系统中,不但有可见光,有的还增加了电视、红外、微光观瞄系统。在该系统中,需要用电视或红外成像精确地瞄准目标。消像旋是图像处理的一个重要应用方向,它是将一幅被旋转过的图像进行较正处理,以便得到正的图像,其无论在军事还是在民用上都被大量采用。在周视光电系统中采用数字化控制的光学消像旋系统将是一个最佳选择,其优点是实时性好、高速度、图像无失真,它不仅可以提高消像旋的准确性、快速性以及实时性,而且可以简化机械设计,提高调试效率、操控性和售后维修质量等。对于最终应用到军工产品具有很大意义。
1 控制对象的机理建模
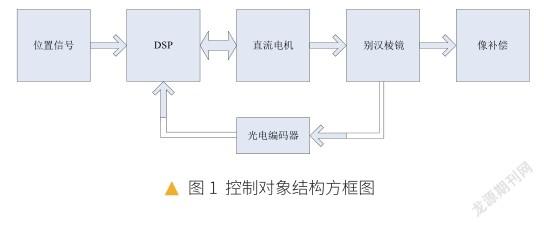
控制对象结构的框图见图1,其中关键部分通过DSP系统对电机传动系统的驱动控制。
控制对象中的齿轮传动系统对别汉棱镜组件进行比例传动,电机和RS22绝对式编码器是同轴的,电机的驱动信号由电路板上的MSK4200功率模块输出,其位置信号通过RS22编码器解算并反馈给控制电路板的接收模块进行处理。
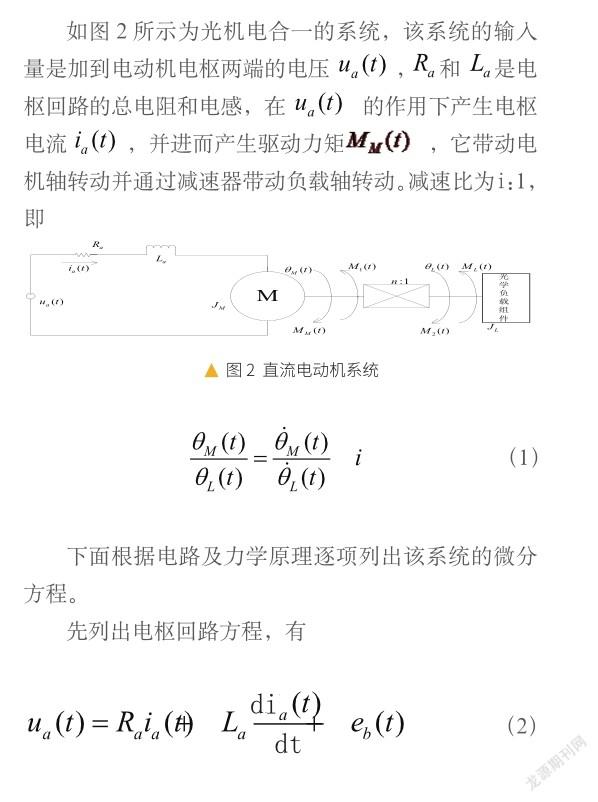
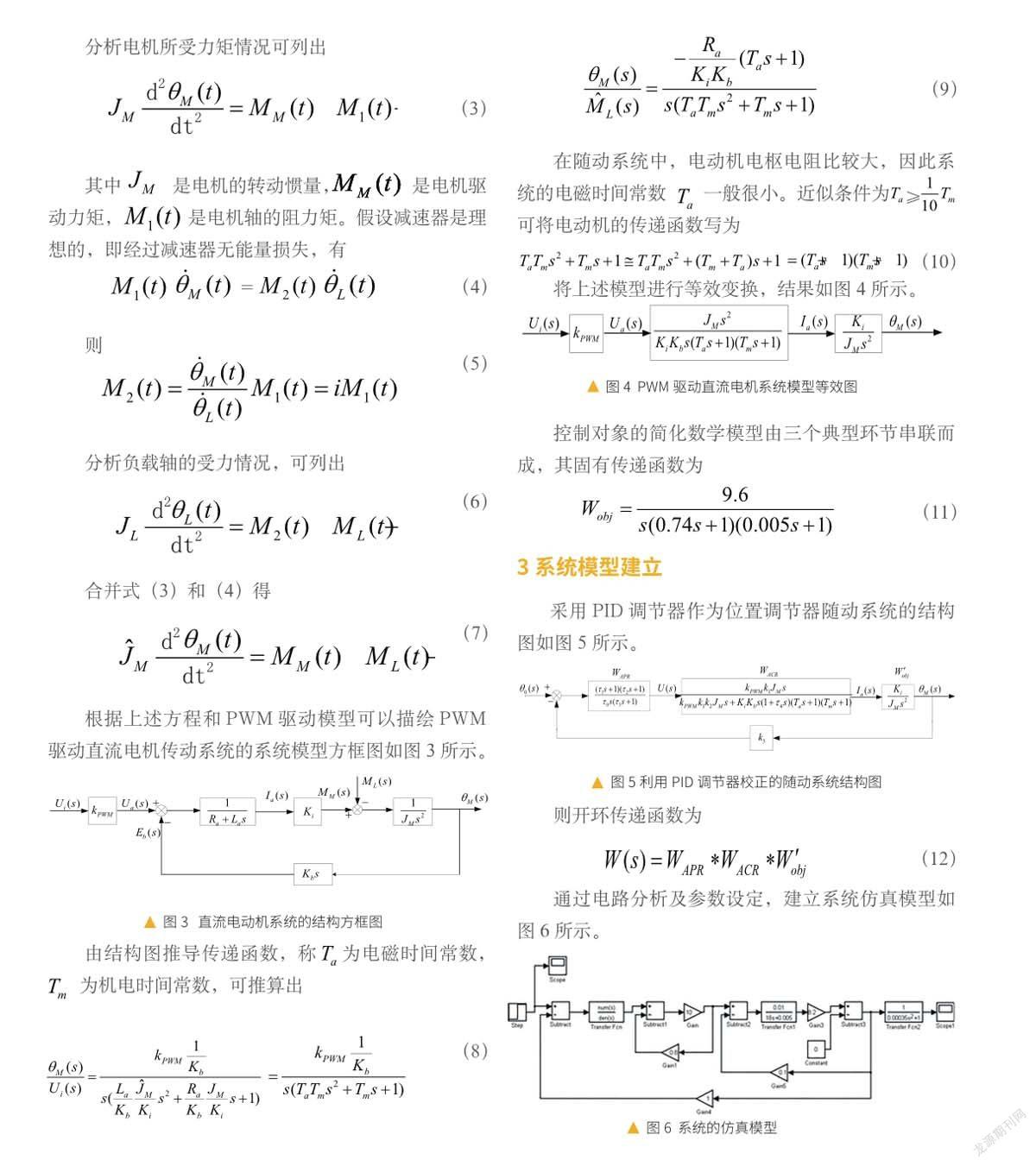
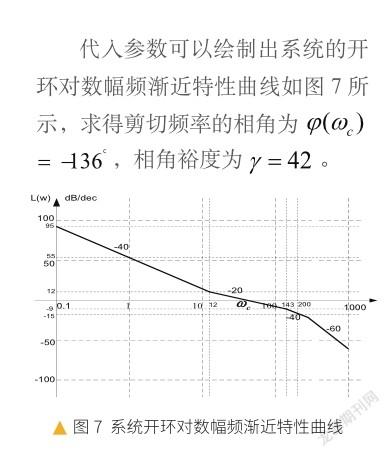
2 控制对象数学模型
4系统电路模块组成
本文设计的电路控制硬件由DSP模块、R/D模块、D/A模块、通信模块、电机驱动模块、键盘输入显示模块及电源复位电路模块等组成。
系统电路的硬件连接图如图8所示。硬件电路可以分为三部分:主控制电路模块、功率驱动模块和位置检测模块。主要控制电路模块DSP为核心,外围电路主要包括:调试仿真接口电路、串行通信接口电路、模拟控制接口、数字模拟转换电路和输入/输出接口等。功率驱动电路包括驱动模块、保护电路、转子位置检测电路等。位置检测模块主要包括编码器转换电路和字符串和数字转换电路等。

5系统的软件设计
5.1 控制系统的主程序结构
TMS320F2812 DSP具有丰富的外围模块和中断资源,大大提高了程序编写的灵活性。其主要完成的任务是DSP系统的初始化、中断使能、参数定义及功能模块单元的参数初始化等。
5.2 位置读取子程序
程序进入主中断程序后,首先运行的子程序即为位置读取子程序,它也是最重要的子程序(略)。
6系统性能分析
本文控制系统实验平台是在潜望式车长周视系统的基础上建立起来的,实验平台由像倾斜仪、车长周视镜、控制和驱动电路板、电机传动系统、模拟发送检测仪、电源箱、操控台以及固定装置等组成。
系统响应分析采用阶跃响应分析 。
从系统开环传递函数测试结果可以看出数据处理所需时间为60μs,满足一般高精度数字控制系统的要求。本设计中设定采样周期1ms,即系统的控制频率为1kHz。
为系统加入阶跃信号,仿真曲线如图9所示。

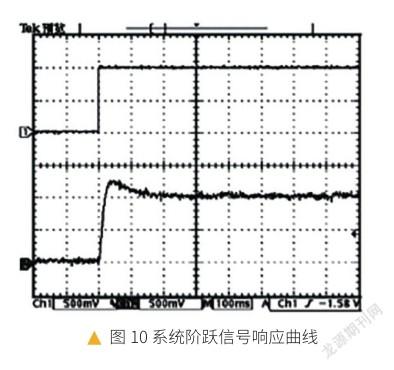
同时在系统试验中用示波器测量得到阶跃响应曲线如图10所示,图中上方的曲线为给定阶跃信号曲线,下方的曲线为系统的响应曲线。可以看出,上升时间约为20ms,峰值时间约为40ms,调节时间约为120ms,超调量约为18%。
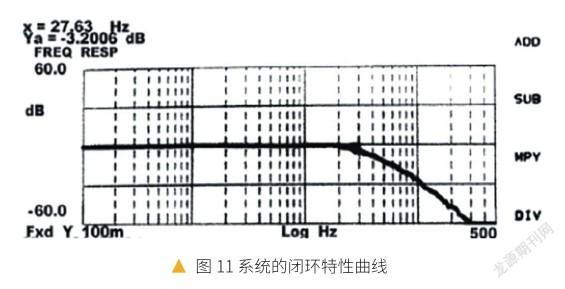
经扫频得到系统的闭环特性曲线如图11所示,系统闭环带宽约为28Hz。
实验表明,在动态环境中,从图像稳定系统扰动指令的输出稳定恢复时间约0.25s,略高于理论计算瞬态时间,观察者不会感到闪烁的图像,满足速度的要求和系统的实时性能。
參考文献:
[1] 童诗白,华成英.模拟电子技术基础[M].北京:高等教育出版社,2000.
[2]廖晓钟,刘向东.自动控制系统[M].北京:北京理工大学出版社,2005.
[3] 杜坤梅,李铁才.电机控制技术[M].哈尔滨:哈尔滨工业大学出版社,2002.
