基于虚拟驾驶平台的山区高速公路行车安全评价研究
2019-09-10龙铭谦赖俊羽
龙铭谦 赖俊羽




摘要:文章结合工程实例,采用八自由度驾驶模拟器对山区高速公路行车进行了仿真,通过实验数据对运行速度一致性和驾驶行为一致性进行了分析和评估,并针对性地提出了优化公路线形和交通安全设施等方面的建议,对公路工程的前期设计工作有一定的指导意义。
关键词:虚拟驾驶;高速公路;安全性评价;交通安全
中图分类号:U492.84 文献标识码:A DOI:10.13282/j.cnki.wccst.2019.09.049
文章编号:1673-4874(2019)09-0175-04
0引言
虚拟驾驶技术是综合车辆操控仿真、场景仿真、动力仿真等系统,构建一个人机交互的驾驶环境,来模拟真实的驾驶行为。虚拟驾驶器的研究早在20世纪60年代就已经开展,如通用汽车公司和大众汽车公司等,但当时这项技术尚处于探索阶段,在车辆研发方面的应用有限。随着科技水平的发展,在20世纪80-90年代,出现了新一代的驾驶模拟器,可同时满足车辆研发和驾驶行为的研究。近年来,在计算机处理能力和速度的提升上,图像实时处理技术逐渐成熟,视觉信息、运动平台、听觉信息等模拟器得到飞速发展,驾驶模拟器也得到跨越性进步,并被广泛应用于车辆研发、驾驶行为研究、驾驶环境评估等方面。武安娜等用主观评价技术对驾驶人在驾车过程中使用手持通讯设备的安全性进行了评价。郭凤香等基于驾驶模拟器,以山区公路某隧道群为对象,对用于非分离式隧道中的倒伏示警柱、视觉标线、常规标线等三种中央隔离设施的效果进行了对比研究.龚鸣等对驾驶模拟中指路标志的参数标定进行了研究,在模拟场景中考虑速度、文字高度因素,在真实场景中考虑速度因素,建立了以可视距离为目标值的关系模型。丁立等通过虚拟驾驶试验,提出了通过研究超速状态下汽车驾驶轨迹来评价公路安全性的方法。Qin Yaqin等利用驾驶模拟系统研究了双车道公路设置爬坡车道后对微观交通流特征的影响,对比分析了设置爬坡车道前后车辆速度、在车道中的横向位置等交通参数的变化情况。Carla Benedetto等利用驾驶模拟系统,通过限定驾驶人行驶速度的方式,利用车辆动力学模型输出指标对公路几何设计进行安全性分析。
目前,基于驾驶模拟器探讨道路线形、交通安全改善对策的研究已被广泛认可,其研究结论也已被应用于实际工程中。驾驶模拟作为一种替代现实环境无法开展的实验研究的技术,已日趋成熟。本文结合工程实例,采用交通运输部公路院和同济大学所搭建的八自由度驾驶模拟器(见下页图1)对山区高速公路行车安全性进行评价研究。
1虚拟驾驶建模
本文以广西乐业至百色高速公路为依托。该公路地处广西西北部山区,设计桥隧比达49.9%,是典型的山区高速公路。依据设计文件选取其中的那暮段K143+360-K156+878(见图2),并用UC-WinRoad驾驶模拟三维建模软件搭建了道路3口实景模型,如图3所示。
根据设计文件,建模时将试验道路分成K-143360、K-L、K-R、K/A和LB五段道路,其中K-L和K-R为分离式路基,且处于隧道路段,LB段为乐百高速公路相交隆百高速公路的一段。
2 行车安全性评价
通过3D实景建模搭建三维道路模型,在驾驶模拟器中开展驾驶模拟实验,设备可采集获取驾驶员在整条道路上驾驶时的所有操作行为数据,不需要通过预测的运行速度进行分析,只需要将所有实验被试的驾驶行为数据进行分析即可。
本次模拟开展了9名驾驶员的实验研究,每名驾驶员均在那暮段试验道路上内侧车道驾车进行双方向的自由行驶任务,同时试验路段不加载交通流,不限制驾驶员的行车速度,记录驾驶员在实验中的所有行为操作数据,并将其行车速度作为数据分析的依据。
2.1运行速度一致性分析
2.1.1驾驶员行驶速度描述分析
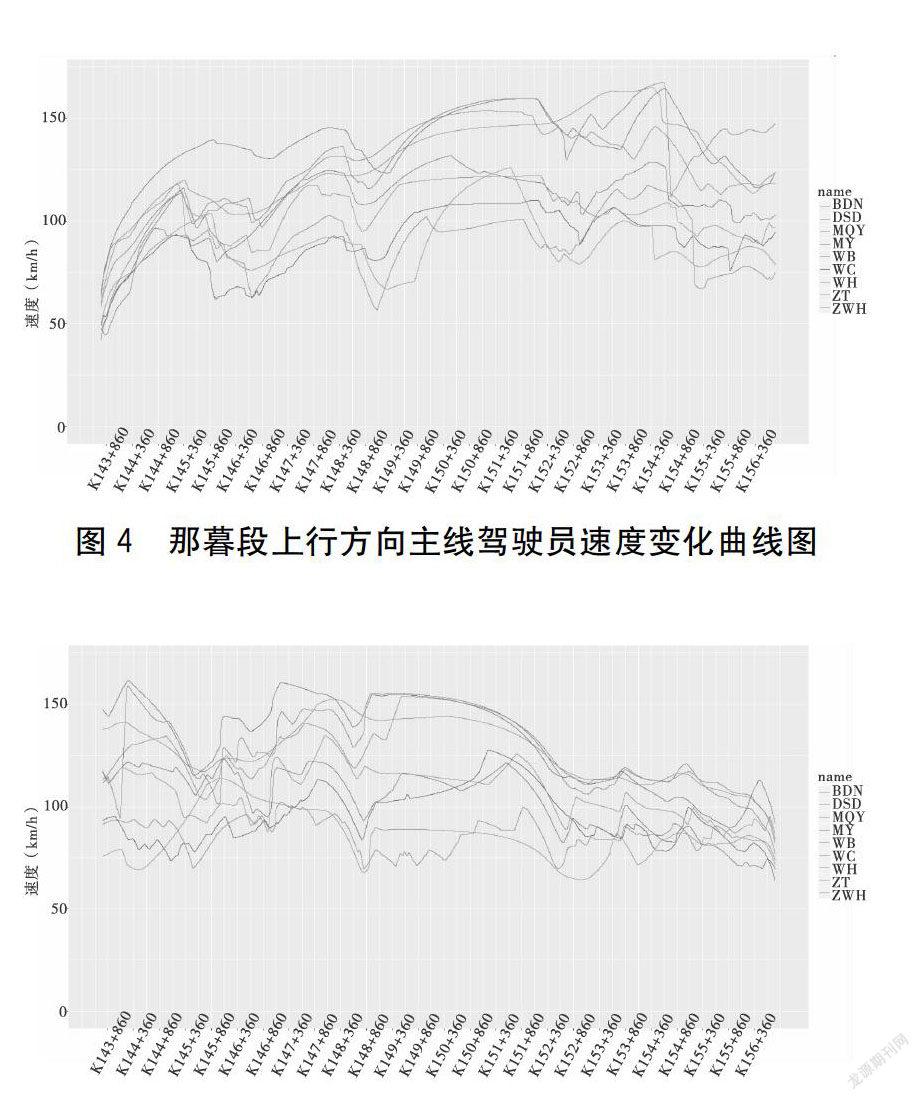
图4和图5分别为9名驾驶员在那暮段正反两个方向行驶速度的变化情况。可以看出:尽管乐百高速公路那暮段线形条件较差,但驾驶员在没有速度限制的情况下,往往会以比较高的速度通过,且速度变化比较剧烈:上行线分别在KT45+360、K148+360、K151+860、K154+360处有显著的减速行为;逆向行驶分别在K153+860、K149+360、K146+860、K145+860处有显著的减速行为。
2.1.2 驾驶员速度离散性分析
道路上同一地点车辆速度差异越大,越容易发生追尾事故。由于本研究所用实验车辆相同,那么导致驾驶员在道路上某一点行驶速度存在差异的唯一因素就是不同驾驶员对该处道路线形指标的感受不同,因而比较道路上同一地点不同驾驶员的速度离散性可以作为评价道路线形设计优劣的一个重要指标。
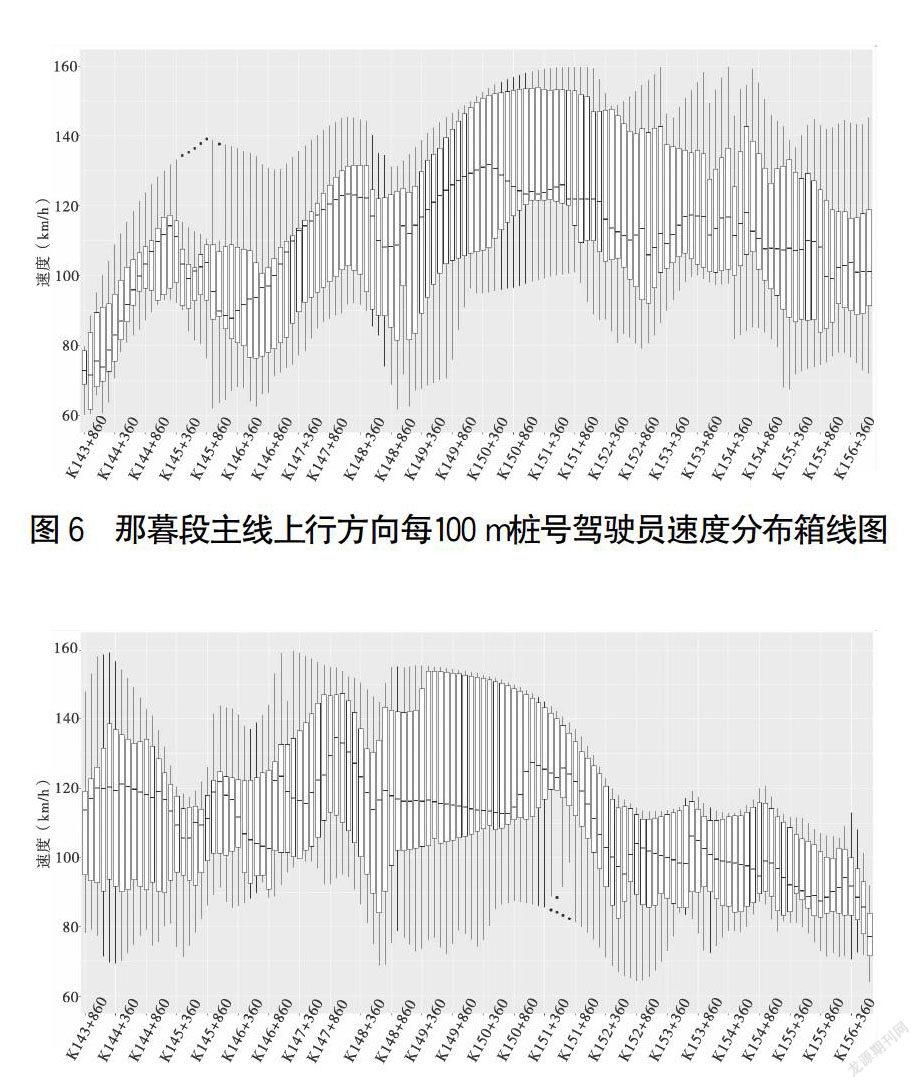
將实验所获取的9名驾驶员正逆向行驶的速度数据通过R语言进行分析处理,绘制了每100m桩处驾驶员速度的箱线图,分别如图6和图7所示。由此可以看出:(1)那暮段双方向驾驶员自由行驶速度差值均较大,很多100m桩位置驾驶员的速度差值都在50km/h以上,说明乐百高速那暮段的线形条件较差,不同驾驶员间自由行驶速度差值较大;(2)那暮段上行线,驾驶员在K145+500处速度显著降低,之后逐步提升,在K148+500、K152+500、K155+500处速度均有降低的趋势;(3)那暮段逆向行驶中,驾驶员在K148+500、K145+500处速度有显著降低。
2.2 驾驶行为一致性分析
2.2.1加速行为
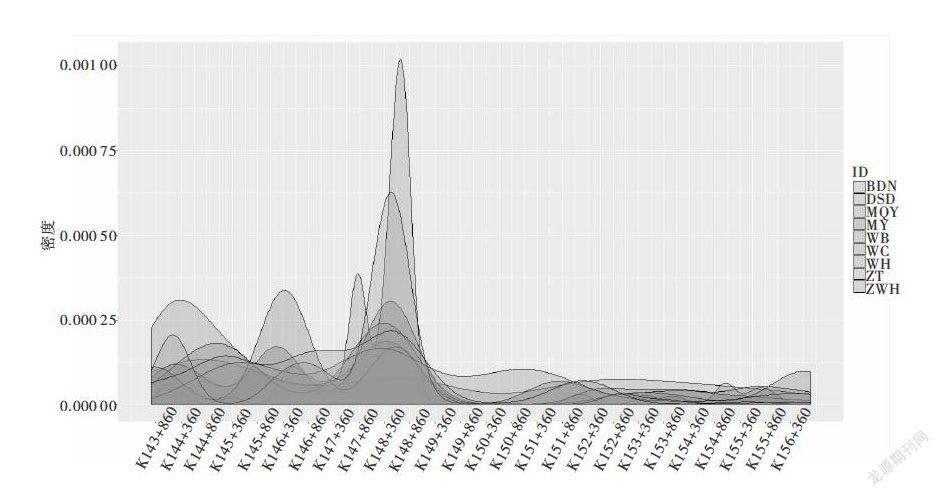
图8是那暮段上行方向驾驶人加速操作与正常值偏离较大行为的概率密度曲线,曲线中概率较高代表在该路段车辆的加速度有更大的概率比正常值高。从图中可以看出,在K153+860处驾驶人有较大概率采用较大的加速度。此处位于连续下坡路段,且正好处在连接600m和400m小半径平曲线的直线上,700m后将驶入400m小半径平曲线,此处的加速行为可能会导致驾驶员在前方400m小半径平曲线上发生操作事故。
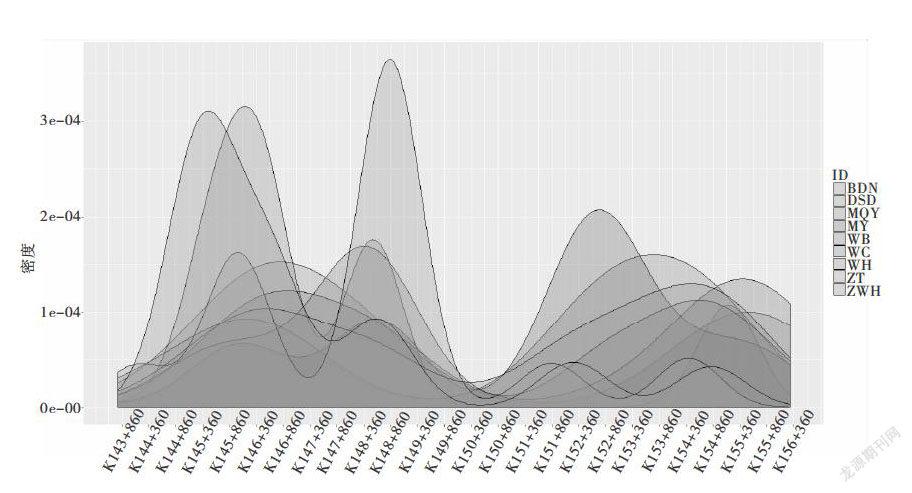
下行方向驾驶人加速操作与正常值偏离较大行为的概率密度曲线如图9所示,从图9可以看出驾驶员在K148+360处有较大概率的加速行为。此处为隧道出口后方500m的直线上,前方为2500m半径平曲线,而且位于3.9%的下坡段。
2.2.2 减速行为
下页图10是那暮段上行方向驾驶人减速操作与正常值偏离较大行为的概率密度曲线,曲线中概率较高代表在该路段车辆的减速度有更大的概率比正常值高。从图中可以看出,驾驶员存在较大减速度概率的位置包括三个:(1)K145+360处,连接2500m小半径平曲线和600m小半径平曲线的直线上,前方100m进入600m小半径平曲线,且之后为连续S弯;(2)K148+360处,弄衣隧道入口前方500m;(3)K153+360-K155+360处,隧道出口后700m,先为1100m半径和600m半径的S弯,再经过一段700m的直线后进入400m小半径平曲线。
下行方向驾驶人减速操作与正常值偏离较大行为的概率密度曲线如图11所示,从图中可以看出驾驶人在K153+860、K148+860-K146+360处有较大概率的减速行为。K153+860处为600m小半径平曲线上,且为连续上坡,同时又是弄衣隧道入口前方1km;K148+860-K146+360处主要是驾驶员由线形较好的路段驶入前方连续S弯路段。
2.3评价结果及建议
(1)K145+426.872-K146+282.191为连续三个小半径平曲线组成的S弯,驾驶员在该路段速度会有显著的降低,通过后又有明显的提升,且異常转向行为概率较高。建议在该路段双方向前方500-1000m处设置连续转弯警告和警示标志;在双方向路段前方500m处设置多组振动标线或视错觉标线提醒驾驶员减速;在弯道外侧设置线形诱导标志。
(2)K146+133.097-K147+140.894段为三个同向圆曲线连接的卵形曲线,驾驶员在上行方向K146+660和下行方向K146+860处前后两个100m桩的速度差离散较大。建议在上行方向K146+400位置设置警示标志、振动标线或视错觉标线等交通工程措施控制车速;在下行方向2660m半径平曲线路段采取一定的交通工程措施严格控制车速。
(3)隧道出入口对驾驶行为一致性的影响比较明显,隧道进出口前方为整体式路基向分离式路基的过渡段,路面结构形式的变化也对驾驶员的操作行为有所影响。因此建议在整体式路基向分离式路基的变化段,以左侧标线内侧增加渐变块的方式提醒驾驶员;在隧道入口前方500m设置必要的警示标志,使驾驶员更早地改变驾驶策略,以便顺利地驶入隧道,同时在出入口段采用过度照明,帮助驾驶员更快地适应隧道环境;由于隧道较长,行驶环境单调,建议除常规的行驶方向LED指示灯外,在隧道内壁每隔一段距离增设一圈反光带,帮助驾驶员识别隧道轮廓。
(4)K154+578.227-K155+160.110段400m小半径平曲线,上行方向为出隧道后连续下坡所遇到的第一个小半径平曲线,且为S形曲线,因而驾驶员速度、车辆控制等易失控,进入后面连续小半径曲线易引发事故。建议在其前方500m处设置连续急转弯标志,在前方1100m半径平曲线处设置减速标线以控制驾驶员从隧道出口出来后的提速行为。
3 结语
随着计算机科学的长足发展,越来越多的先进技术被应用于基础设施建设,并显著提高生产力。本文结合工程实例,采用虚拟驾驶平台对山区高速公路行车安全评价进行了研究,再次证明了虚拟驾驶技术在工程应用中的可行性。同时根据对模拟驾驶数据的采集分析,能为公路线形及交通安全设施的优化设计提供一定的参考。
