基于视频图像的高速公路车辆识别算法研究
2019-09-10曾宇凡
曾宇凡





摘要:针对高速公路监控视频图像实现路上车辆的自动识别,文章分析了当前主要的路况车辆识别算法,并提出采用基于高斯混合模型的矩阵区分背景图像和前景道路,使用彩色矩阵变化获得车辆前景信息,通过提取图像纹理信息结合帧间差分算法识别道路车辆的改进算法。经实验表明,该算法能快速实现背景分割,获得前景图像并能准确识别出车辆信息。
关键词:视频图像;车辆识别;高斯模型;帧间差分算法
中图分类号:U491 文献标识码:A DOI:10.13282/j.cnki.wccst.2019.09.046
文章编号:1673-4874(2019)09-0165-03
0引言
近年我国高速公路通车里程在高速增长,同时随着信息技术的飞速发展,为建设智慧高速立体化管理系统提供有力支撑。其中路面监控视频数据具有对路面路况信息的获取最为丰富、数据可重复使用的概率最高、数据获取方式最为直接等优点,因此采用路面监控设备结合视频检测系统,利用数字图像处理技术与模式识别技术实现人工智能判别交通异常的方法,能够实现高速公路上运动车辆自动检测、根据车辆特征自动跟踪、交通事故检测、道路异常判断等目标,对提高交通事故救援和排障的效率,提高高速公路运营管理效率具有重要意义。
1视频图像路况识别主流算法分析
对于采用图像识别技术识别车流路况等动态信息,有很多人采用图像帧间差分算法进行识别。帧间差分动态检测算法的基本思路是将两个相邻的图像数据进行差分运算获得差值矩阵图像,再对该差值矩阵图像进行阈值化处理,设定预设的阈值进而检测出图像中运动的物体,公式如下:
式中:D(x,y)——检测出的运动目标在图像坐标(x,y)位置的像素值;
I(x,y)——t时刻视频图像中(x,y)坐标点的像素值;
T——计算的比较阈值,阈值的设置直接决定着公式判断的准确性。
背景差分法是另一种识别图像动态物体的常用算法,其主要思想为将采集到的视频图像与预先采集好的当前背景图像进行矩阵差分计算,获取当前差值图像的矩阵,并同样采取适当的阈值判断,进而检测出图像中的运动物体。具体公式如下:
其中:D(x,y)——检测出的运动物体在视频图
像中(x,y)坐标的位置;
F(x,y)——当前需要检测的视频图像
(x,y)坐标的像素值;
B(x,y)——预先设置好的背景图像中
(x,y)坐标点的像素值;
T——设置的阈值。
同样为了提高识别算法的准确性设置合理的阈值非常重要。
流光检测法的基本思想是可以将这些连续变化的图像信息比作是“光流”,因为运动目标的灰度大小在短时间内变化较小且目标速度不会瞬间突变,因此,根据光流描述的图像内像素点间的关系,可以获得背景与目标的三维信息。具体计算过程为:图像上点(x,y)在t时刻灰度值为I(x,y,t),那么经过dt时间后,原像素点(x,y)将会移动到位置(x+d,y+d),假设有μ(x,y)、v(x,y)分别表示(x,y)点处像素在x、y方向上的运动速度,根据图像灰度值不变原则,可以得到如下公式:
I(x+dx,y+dy,t+dt)=I(x,y,t) (3)
上述公式可以表示为:
Idx+Idy=-Idt (4)
根据设定的u=dx/dt,v=dy/dt,可以得到公式(5):
根据公式(5)即可获得流光点的在x、y两个方向上的速度,即可完成图像中运动物体的识别。
另外还有一种是物体特征检测法,该方法的主要思想是将图像中的颜色、纹理和形状等特征数据提取出来,检测出视频图像中运动的物体。图像颜色特征数据的提取一般采用将RGB变换到HSV空间表示,能获得准确的颜色判别数据。而描述灰度变化规律的纹理特征提取则一般采用反映出灰度分布的均匀程度的二阶距ASM为:
上述几种算法都是当前比较主流的通过视频图像处理技术对运动物体进行识别的算法,它们都有各自的优点和缺点。帧间差分法的优点是算法实现简单,运算速度快,受到图像光照变化影响较小;但是处理效果与图像采样率以及运动物体的运动速度有关,识别率不稳定。背景差分法实现算法简单,识别准确率较高,但是需要预先设置背景数据,对于背景复杂的图像识别率不高,而且对于存在光线变化的背景图像需要精确匹配预设的背景图像进行差分运算。流光法的主要优点是无需预先设置背景数据,而且能够使用摄像头设备动态采集数据,但是流光法受图像光线的影响比较大,如果需要提高识别准确率就要对图像的颜色、灰度进行变换运算,运算量比较大。颜色、纹理特征提取识别法的优点是识别的准确率比较高,但是运算的复杂度比较高,对于复杂背景的图像识别准确率不稳定。
2 在高速公路監控视频图像场景T的改进算法
基于上述主流图像识别算法的分析可以发现,在高速公路路面监控视频图像场景下,对图像进行分析处理进而实现视频图像中的车辆识别、异常检测等智能识别功能需要。考虑到高速公路上整体背景复杂,环境变化大,光线变化较大,但是道路局部背景环境变化小,车辆运行速度快,出现的异常情况复杂,对图像识别速度要求高.因此,本文探讨一种在高斯混合背景模型下,结合基于HSV色彩转换的邻域均值快速背景消除法,提取视频图像前景车辆局部信息,再采用图像纹理特征量数据对车辆运动信息进行检测的算法思路。算法步骤如下:
(1)通过结合高斯混合模型的矩阵将当前帧图像的复杂背景过滤掉,获得前景道路即车辆数据信息。
高斯混合模型矩阵包含了分别表示前景图像概率密度和背景图像概率密度的高斯分布函数。为了能够区分出前景图像和背景图像,将监控图像的高斯混合模型中的X个高斯分布按照权重和标准差之间作对比排序,排序在B前的高斯分布函数作为背景的高斯分布,而排在K-B后面的高斯分布作为前景分布描述。
公式中T表示设置的权重阈值,度量高斯混合模型中背景的分布权重和获得的最小值。相关文献中已经证明,T取0.5-0.8之间时获得的背景和前景分割效果最好。
(2)HSV色彩转换后的灰度矩阵采用最大类间分割法来确定前景车辆和背景道路间的阈值,使得分割后图像的前景与背景之间方差达到最大.因为HSV颜色模型更加符合人的视觉感受,而且能够保留精确的灰度信息和色彩信息,能够突出阴影与运动物体和背景的差距,使背景和前景获得最大差距。具体计算公式如下:
(3)通过提取上文叙述的4个纹理特征量,对获得的前景车辆图片进行分析识别,将两帧之间的图片获得的相同车辆特征数据做帧间差分运算,获得车辆运动状态数据,或者道路异常信息数据,或者对将上一步获得的非车辆前景图片数据进行判别获得道路异常信息。决策算法如下:
Δ是相邻的图像帧获得的纹理信息价值之间的差值,即:
ΔP=P-P(16)
δ为判断阈值,纹理判断结果超出阈值则相对应的图像区域为最终识别的运动目标区域。
3 实验结果
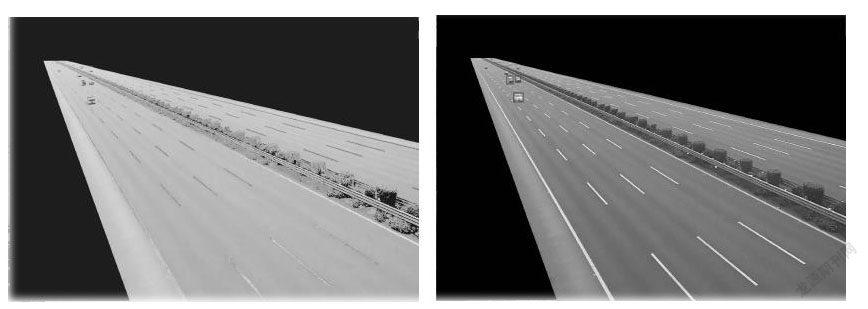
本文主要是针对泉南高速(柳州至南宁段)建设的全程监控录像图像作为实验对象,获得的实验结果如图1-4所示。
根据实验结果可见,改进后的识别算法能够提取路面前景连通域的道路图,并通过色彩矩阵获得车辆数据,再通过纹理特征识别出车辆信息.
4 结语
本文提出的改进算法在一定程度上能够提高视频图像识别道路车辆的算法速度和准确性,下一步应该针对监控图像中出现的行车异常、突发事故、异常物体运动等视频图像进行提取和识别,需要深入研究自动识别异常图像的算法。
