更聪明的自动驾驶?
2019-09-10MattJancerENVIRO
Matt Jancer ENVIRO
如果你总觉得现在汽车的自动驾驶功能过于保守、优柔寡断、跟车距离太长时会被人加塞,恭喜,不只你一个人这么想。并且,英特尔及其子公司Mobileye也发现了这一点,他们决定开发一套名为责任敏感安全(RSS,Responsibility Sensitive Safety)的系统,让自动驾驶系统的工作逻辑更接近于人类的判断。英特尔认为让自动驾驶功能更加“自信”能够让道路更加安全,并且带来更高的通行效率。
典型的自动驾驶系统使用人工智能(AI)进行分析和决策,依靠不断地计算来预判触发事故的风险。英特尔认为这太保守了,过多地考虑了发生可能性极低的道路状况。将驾驶权交给这些自动驾驶系统,你坐在车里的感觉就像在一个没有红绿灯的路口让一位新手司机尝试左转——它会错过所有的安全窗口,在这个路口从天亮等到天黑......
但是RSS系统不同于人工智能,因为它是确定性的,而不是概率性的。该系统为自动驾驶系统提供一个预先设定的程序,定义安全和不安全驾驶情况的规则。

RSS会让自动驾驶变得更加积极,直到确保安全和可能触发事故的临界点,这个理念和传统自动驾驶的极端保守概念有所区别。
对于人类驾驶员来说,道路交通事故由不同的人为因素导致的不同情况,而机器拥有周围环境的高度精确信息,并且永远不会分心、走神或是因为去捡掉在地上的手机而酿成错误。RSS通过数学模型,使自动驾驶遵循一个既定模式。
听着有点像RSS遵守了“道路千万条,安全第一条”,如果发生事故一定是另一方的责任?这是否是自动驾驶的一种“甩锅”行为?没这么简单。英特尔尚未与保险公司或监管机构合作,正式确定RSS在事故后分配责任方面的作用。
英特尔不认为RSS是100%可靠的,但是它不可靠的情况仅限于刚才提到的设备故障等机械原因,而不是算法会出现问题。同时,RSS不允许自动驾驶汽车通过造成轻微事故来避免另一起事故。RSS不是一个规避责任的模型,而是一个让车辆按照最高安全标准来高效运行的自动驾驶系统。
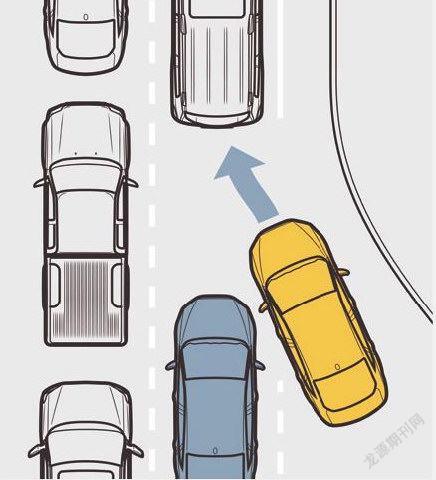
情景1 车辆行驶的车道前方出现拥堵,人类做出判断且并线到隔壁车道显然是最佳选择的情况。传统的自动驾驶车辆会因为一直无法得到足够安全的空间来执行变道而陷入困境,而RSS会像人类的驾驶逻辑一样通过尝试插入来向隔壁车道的车辆施压。当然,如果传感器识别到侧方后车是个“硬茬儿”,便会停止变道另外等待合适时机。
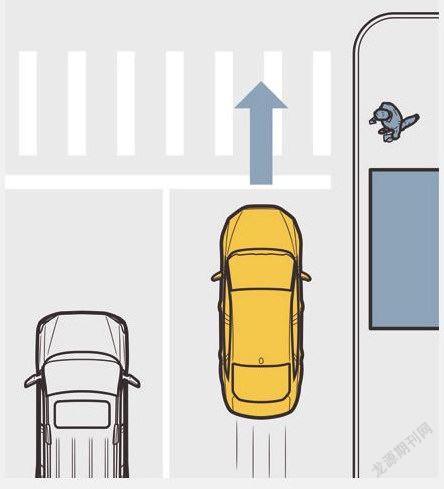
情景2 类似巴士候车亭这样人行道上的障碍物让人行道等待区域成为了自动驾驶的识别盲区,RSS系统允许车辆在保证安全的情况下通过路口。RSS在此处将“保证安全”定义为如果有行人违反交通灯快速冲出马路,系统也能自動刹停车辆。
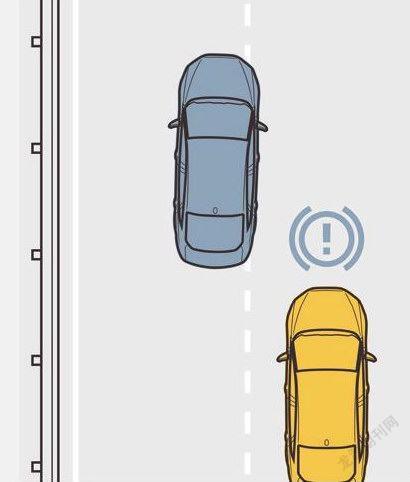
情景3 被别人加塞了怎么办?如果旁边车道的车辆执行不安全变线或是压线行驶,RSS识别到这种入侵后会采取包括但不仅限于刹车之类的规避动作来避免碰撞的发生。就像人类进行预判断一样。如果RSS判定安全,则不会出现传统自动驾驶一样因为跟车或自动行驶线路出现障碍物优先执行减速的逻辑。
