基于比例谐振调节器的地铁车辆牵引电机谐波抑制研究
2019-09-10李葛亮
李葛亮
(南宁轨道交通集团有限责任公司, 南宁 530000)
目前的城市轨道交通车辆主流牵引系统控制中,采用VVVF(Variable Voltage and Variable Frequency)牵引逆变器给三相异步牵引电机供电,实现变频调速功能。在空间矢量PWM(Pulse Width Modulation)调制策略控制下,大量的电压谐波施加在牵引异步电机绕组上,产生了谐波电流及谐波磁通,谐波电流作用在电机绕组上产生脉动谐波转矩,并随之产生额外的噪声[1]及附加损耗[2],严重时会使异步牵引电机产生振动,导致电机内部温度升高,降低了电机的使用效率,最终影响了列车的动力学性能(平稳性和舒适度)。随着城市轨道交通的发展,乘客对地铁车辆运行的平稳性和舒适度要求越来越高,通过改善VVVF逆变器控制牵引电机的电能质量,减小牵引电机中的谐波转矩,进一步提高列车的动力学性能,将越来越有必要。
目前针对异步电机的谐波抑制,国内外学者进行了大量的研究[3-12],提出了很多优化控制策略和谐波抑制的实现方法。文献[3-4]通过建立采用PWM调制的VVVF逆变器模型,得出了稳定运行下的谐波分布特点;文献[5]对列车牵引电机的谐波转矩进行了计算分析,指出在非正弦电源供电的情况下,牵引电机中主要含有5、7、11、13次谐波转矩;文献[6]中采用特定次谐波消除PWM调制方式,起到了良好的谐波消除效果,但其仅可消除指定次的谐波含量;文献[7]将特定次谐波消除PWM调制应用于列车牵引逆变器中;文献[8]分析了牵引电机的转矩脉动,并指出了特定次谐波消除方式最大的应用障碍是开关角方程组的求解,对控制逻辑要求较高,实现难度较大。为消除更多次数的谐波,一种高效率的双谐振积分器(二阶广义积分器,Second Order Generalized Integrator,SOGI)被提出[9],并成为了研究热点。由此演变而来的比例谐振(Proportional Resonant,PR)调节器,目前广泛应用在风力发电、光伏及智能电网中[10-13]。文献[10-12]将PR调节器应用到了风力发电机机侧谐波抑制中,起到了较好的谐波抑制效果;文献[13]将SOGI应用在电网电压电流正负序分量检测中,具有精确、快速的跟踪相应效果。文献[14]针对PR调节器进行分析,并给出了其应用在电流控制环节中的设计方法。
首先对牵引电机产生谐波的原理进行介绍,分析影响牵引系统特性的主要谐波及转矩,而后介绍PR调节器的原理及结构,并将其应用在目前的牵引系统控制策略中,对主要谐波进行跟踪抑制,最后进行了试验验证。
1 异步牵引电机产生谐波的原理
1.1 空间谐波与时间谐波
可以将在异步牵引电机中存在的谐波分为空间谐波和时间谐波[15]。由于受异步牵引电机中绕组分布及气隙不均等因素影响,在运行过程中,基波电流会在不均匀的气隙中产生谐波,这种由于电机自身构造原因引起的谐波称为空间谐波。而由于给牵引电机供电的逆变器输出的电压和电流中含有一定成分的谐波,这部分谐波电流会在电机中产生气隙磁势谐波,这种由于外部原因引起的谐波称为时间谐波。一般情况下,异步电机采用分布和短距绕组,其自身对基波电流产生谐波的影响较小,因此在后续的分析中只考虑时间谐波造成的转矩。
1.2 谐波电磁转矩
通过建立三相异步牵引电机谐波等效电路来分析谐波电磁转矩的产生,电机谐波等效电路图如图1所示。

图1 异步牵引电机谐波等效电路
k次谐波的电路参数见式(1)。
(1)
令电机转差率为s,则对k次谐波的转差率为:
(2)
谐波转矩又可分为稳定谐波转矩和脉动谐波转矩,可根据图1直接得出稳定的谐波转矩公式为:
(3)

因为谐波电流本身有效值较小,其产生的稳定谐波转矩数值也很小,同时正向与负向的转矩相互抵消,所以稳定谐波转矩对电机转矩造成的影响可忽略,以下的分析主要考虑脉动谐波转矩的影响。
脉动谐波转矩是由电机气隙中谐波电流和磁通的相互作用产生的,对于牵引异步电机,谐波电流为6n+1次,谐波的幅值会随着谐波次数的升高而降低,因此,主要考虑基波电流所产生的磁场与5、7、11、13各次谐波电流所产生的磁场之间相互作用引起的脉动谐波转矩。设ω1为基波磁场旋转角频率,ω2为电机转子旋转角频率,根据异步电机转差率计算公式s=(ω1-ω2)/ω1可知,5次谐波磁场相对于基波磁场旋转的角频率为-6sω1,7次谐波磁场相对于基波磁场旋转的角频率为6sω1,由此可知6倍基波频率的脉动转矩是由5、7次谐波电流共同形成的。同理可得11、13次谐波电流将形成12倍基波频率的脉动转矩。脉动谐波转矩的计算公式可根据虚位移原理得出:
(4)
式中θ为两个相互作用磁场间的相位差;Wm为气隙磁场储能。
基波及谐波的合成磁场为:
b=bj1+bjk=
Bj1cos(pθm1)+Bjkcos(pθm1+θ1k)
(5)
式中bj1、bjk为基波磁场和k次谐波磁场的磁通密度分布波;θm1为定子以基波在某时刻的机械角度;Bj1、Bjk为基波和谐波磁场的幅值;θ1k为基波与k次谐波磁场幅值间的夹角。当k=6n+1时,θ1k=(k-1)sω1t;当k=6n-1时,θ1k=-(k+1)sω1t。
磁场储能为:
(6)
式中μ0为气隙磁导系数;D为电子定子内圈直径;j为电机气隙有效长度;l为电机轴向有效长度。
由式(4)和式(6)可得,k次谐波在气隙基波磁场中产生的脉动谐波转矩公式为:
(7)
2 谐振调节器消除谐波原理
2.1 谐振调节器介绍
PR调节器可由SOGI演变而来,根据内模原理可知,在控制系统的反馈回路中引入交流量相同的动力学模型,则该系统可对输入的交流量进行无静差跟踪控制[16]。异步电机谐波电流均为正弦信号波形,可设k次谐波电流表达式为
(8)
式中φk′为k次谐波电流的初相角;In为k次谐波电流的有效值。
将式(8)做Laplace变换,可得到其传递函数为:
(9)
可将上式分母部分提出,简化成式:
(10)
式(10)为理想情况下的二阶谐振调节器,二阶谐振调节器存在两个对称的极点,即s=±jωk,可以同时跟踪指定频率ωk的正序和负序两个交流信号,K为增益系数。由于理想情况下的谐振调节器带宽较小,不便于应用在工程中,常用非理想谐振调节器代替,其传递函数为:
(11)
式中ωc为非理想谐振调节器的截止频率。可以通过设定适当的截止频率ωc,使得非理想谐振调节器的带宽变大,提高控制系统的稳定性。
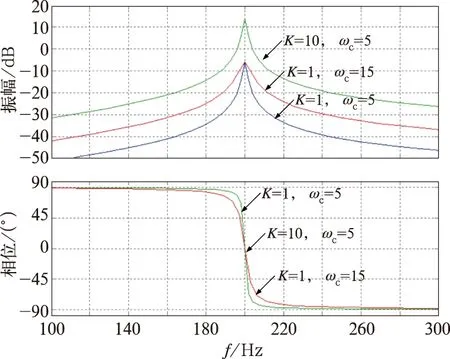
图2 非理想谐振调节器在200 Hz工况下bode图
图2为非理想谐振调节器在谐波频率为200 Hz工况下,K、ωc在不同取值时的bode图。由bode图的幅频特性可以看出,K取值越大,谐振调节器输出的增益越大;ωc取值越大,谐振调节器的带宽越大。为取得更好的谐波抑制效果,并考虑系统的稳定性,一般情况下令ωc=15 rad/s。
2.2 异步牵引电机谐波抑制控制策略
将在传统的异步电机矢量控制策略中引入非理想谐振调节器,对逆变器谐波电流进行控制。在异步电机转子同步旋转坐标系(dq坐标系)下,对异步电机定子电流中含有的6次及12次谐波分量进行抑制。由上述分析可知,5、7次谐波在dq坐标系中为6次正序、负序分量,11、13次谐波在dq坐标系中为12次正序、负序分量。在控制回路中,将传统的比例积分(Proportional integral,PI)调节器与抑制6次、12次正负序分量的谐振调节器并联,可得到PI+PR调节器的表达式为:
(12)
式中Kp为两个调节器共用比例增益系数;Ki为积分系数;Kr为谐波增益系数。
基于PI+PR调节器的牵引异步电机谐波抑制控制系统框图如图3所示。在该系统中,根据列车牵引所需要的转矩可算出基波定子电流isd、isq指令值,该值为直流量;谐波分量为交流量,是需要抑制的部分,所以令其给定指令值为0。定子指令电流值与反馈电流值做差,通过PI+PR调节器进行调节。PI调节器与PR调节器各司其职,PI负责直流量的跟踪调节,PR负责交流量的谐波抑制,由于PI和PR控制器共用一个比例增益系数Kp,所以Kp的取值要折中确定。
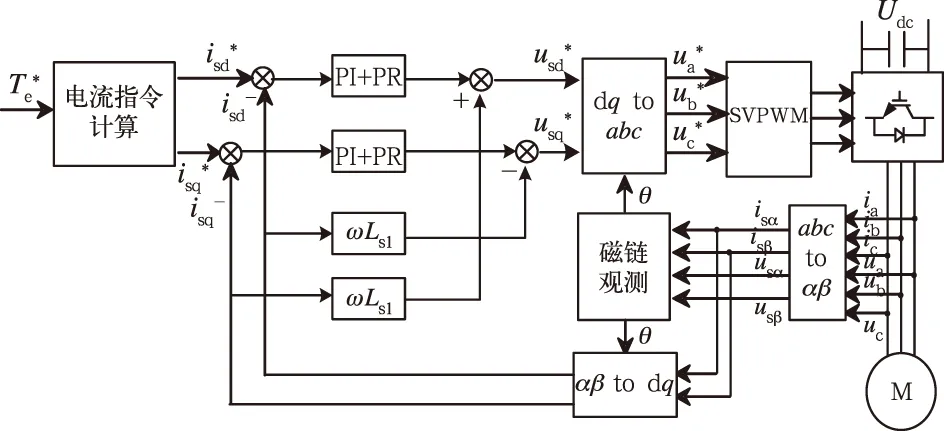
图3 牵引异步电机谐波抑制控制系统框图
3 实验研究
为验证PR调节器在异步牵引电机谐波抑制控制策略的可行性,搭建了25 kW小功率的列车牵引系统试验平台,试验平台主要由TMS320F28335为CPU的牵引逆变器、异步牵引电机及相关变压器、断路器、线缆组成。试验系统主要参数如表1所示。

表1 试验系统主要参数
图4为模拟列车以15 km/h速度运行时牵引异步电机A相、B相定子电流ia、ib及谐波含量分析对比图。
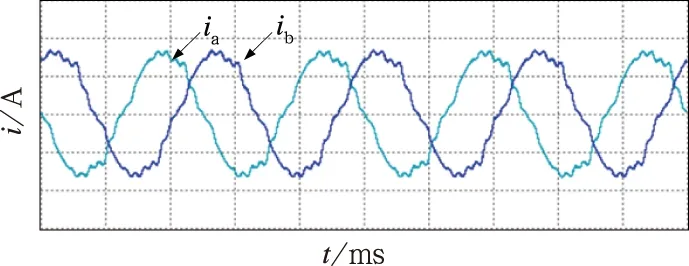
图4 PI调节器控制时A相、B相定子电流ia、ib波形
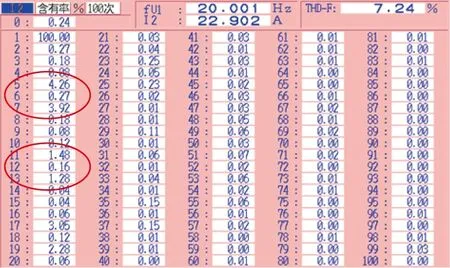
图5 PI调节器控制时A相、B相定子电流ia、ib谐波含量

图6 PI+PR调节器共同控制时A相、B相定子电流ia、ib波形
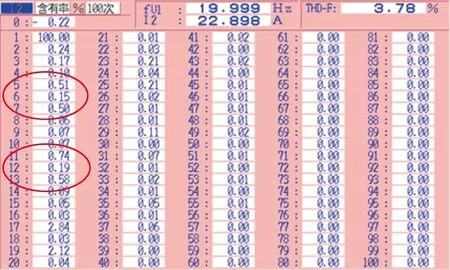
图7 PI+PR调节器共同控制时A相、B相定子电流ia、ib谐波含量
当仅采用传统的PI调节器控制策略时,从图4、图5可以得知,定子电流畸变率较大,电流中含有大量的低次谐波,THD值为7.24%。其中5次谐波含量为4.26%,7次谐波含量为3.92%,11次谐波含量为1.48%,13次谐波含量为1.28%。采用PI和PR调节器共同对异步电机定子电流进行控制后,由图6、图7可见,定子电流正弦度得到了较大的改善,电流谐波含量较小,THD值减小至3.81%。其中,5、7次谐波含量得到较大改善,分别减小至0.51%和0.50%;11、13次谐波电流也减小至0.74%和0.58%。

图8d轴反馈电流中含有的谐波脉动图
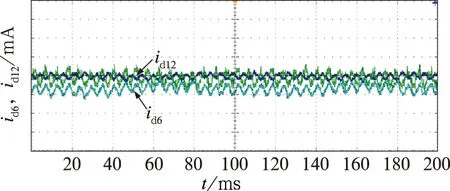
图9d轴电流经过PR调节器后中含有的谐波脉动图
图8、图9为牵引异步电机控制系统电流环d轴反馈电流与经过PR调节器后的d轴电流谐波含量对比,可以看出,经过PR调节器后的6次、12次谐波电流含量明显减小。
4 结 论
对牵引电机产生谐波的原理进行介绍,分析影响牵引系统特性的主要谐波及转矩特性,而后改进目前的牵引系统控制策略,引入比例谐振调节器(PR)对主要谐波进行跟踪抑制,得出以下结论:
针对VVVF逆变器控制列车牵引电机的电流谐波含量较高问题,在传统的控制策略中引入PR控制器,研究了基于PR调节器的牵引异步电机谐波抑制控制策略,通过在实验平台上进行测试,模拟列车运行速度,采用VVVF逆变器控制异步电机转速及定子电流幅值,该控制策略对异步牵引电机的定子电流谐波具有良好的抑制效果,可减小电机的谐波转矩脉动、噪声以及附加损耗。
