粒子群优化广义预测控制在列车制动系统中的应用
2019-09-10吴广荣
吴广荣
(辽宁铁道职业技术学院, 辽宁锦州 121000)
动车组列车制动控制是ATO的重要环节,是实现动车组列车安全、准时、舒适、精确停车等功能的前提和保障。ATO的核心功能是根据给定的速度曲线,结合列车运行区段的线路参数、列车自身性能及当前列车运行速度等实际运行状态,自动调整对动车组列车施加的控制量,使列车实际运行速度能够精确跟踪系统给定的速度曲线[1-2]。要实现该目标的关键是:建立准确的动车组列车制动过程模型和计算列车的精确控制量[3]。针对该问题的解决方案大多是以力作为控制量的数学模型对ATO进行研究[4],并利用不同的算法进行优化,在比较理想的运行状态下能够满足动车组列车的控制要求,但在列车受未知干扰时,控制量变化幅度较大,影响乘客体验。然而,郭红戈等研究者通过动车组列车制动指令的传输过程和制动力的产生过程,建立了动车组列车制动系统模型,在列车受未知干扰时,控制效果良好[5]。在此模型的基础上,将动车组列车制动模型分为静态子系统和动态子系统两部分,根据列车制动系统的性能和要求,利用具有鲁棒性好和对模型精度要求不高的广义预测算法GPC控制。但GPC算法在非线性系统存在一定的局限性,且要多次求解丢番图Diophantine方程,计算量大,计算时间长;而混沌粒子群算法CPSO具有较好的随机性、收敛性和自适应性,适合动车组列车制动系统模型难以建立精确的复杂问题的快速优化求解的优点。因此,通过CPSO优化GPC算法进行进一步优化研究,以达到动车组列车控制跟随更及时、控制量超调更小、乘客舒适度更高的良好控制效果。
1 动车组列车制动系统模型
GPC依据动车组列车的速度v(t)对其施加相应的控制量u(t)。制动模型如图1所示。静态子系统描述当动车组列车v(t)已知时,u(t)和理论加速度A的对应关系;动态子系统由一个延时环节、两个惯性环节、外界扰动和一个积分环节串联而成。动车组列车v(t)可通过测速系统获得,通过求解的A,对函数A=f(u,v)进行反算,可以计算出作用于动车组列车的实时控制量u(t)。y(t)为动车组列车位移。

图1 动车组列车制动系统模型
2 CPSO-GPC控制器
图1中模型的动态子系统有延时环节,且存在风力、坡道、曲线和道岔等外界干扰因素 ,是非线性系统。GPC在非线性系统存在一定的局限性,然而CPSO具有较好的随机性、收敛性和自适应性,适合动车组列车制动系统模型难以建立精确的复杂问题的快速优化求解[6]。因此,对其设计CPSO-GPC控制器,模型的动态子系统可看作CARIMA模型动态线性子系统和外界干扰引起的动态非线性子系统组成[6-7],可表示为
v(k)=v1(k)+vn(k)
(1)
式中:v(k)、v1(k)、vn(k)分别为动车组列车在时刻k的速度、动态线性子系统在时刻 的输出速度、动车组列车制动系统模型中动态非线性子系统在时刻k的输出速度。
对于动态线性子系统,可用CARIMA(Cont-rolled Auto-Regressive Integrated Moving-Average,受控自回归积分滑动平均)模型表示为
C(z-1)ξ(k)/1-z-1
(2)
式中:h为延时;A(k)为动车组列车在时刻k的理论加速度;ξ(k)是方差为δ2的白噪声。

动态非线性子系统在时刻k的输出速度用CPSO优化
vn(k)=fCPSO[v(k-1),…,v(k-n),A(k-1),
…,A(k-m-1)]
(3)
式中:fCPSO为CPSO优化的连续可微的非线性函数。
由式(1)~式(3)得
(4)

根据动车组列车制动系统模型的功能和特点,设计如图2所示的CPSO-GPC控制器。vy是预测输出速度值,vc是参考速度值,则
(5)
式中:vs为速度设定值;αi为柔化系数,0<αi<1,i=1,2,…。

图2 动车组列车制动系统模型的CPSO-GPC控制框图
结合式(2),v1(k)可表示为
(6)

a1z-1+…+anz-n。
引入丢番图Diophantine方程
1-Ej(z-1)D(z-1)(1-z-1)+z-jFj(z-1)
(7)
式中:Ej(z-1)、Fj(z-1)分别是z-1的j-1和n次多项式。
将式(6)两边同乘以Ej(z-1)(1-z-1)zj,则
v(k+j)=Fj(z-1)v(k)+
Ej(z-1)(1-z-1)vn(k+j)+Ej(z-1)ξ(k+j)
(8)
式中:ξ(k+j)为k时刻以后的噪声;j=1,2,3…是未知的。
若把式(8)前3项看作模型的输出预测vy(k+j/k),Ej(z-1)ξ(k+j)看作是实际值与vy(k+j/k)之间的偏差,则k时刻以后j步的输出预测值为
vy(k+j/k)=Fj(z-1)v(k)+
Ej(z-1)(1-z-1)vn(k+j/k)
(9)

式中:Gj(z-1)=g0+g1z-1+…+gj-1z-(j-1);Hj(z-1)是z-1的m-1次多项式。
动态子系统用目标函数表示为
(10)
式中:λ为控制加权系数。由于v(k+j)无法测出,故用vy(k+j/k)代替。则k时刻的输出预测序列为
v(k+j)=vy(k+j/k)
(11)
根据式(11),把式(9)代入式(10)得
H(1-z-1)A(k-1)-EVn]
(12)

Vc=[vc(k+1),…,vc(k+P)]T,
P为预测时域长度,起始值取1;
F=[F1(z-1),F2(z-1),…,FP(z-1)]T;
H=[H1(z-1),H2(z-1),…,HP(z-1)]T;
E=[E1(z-1),E2(z-1),…,EP(z-1)]T;
Vn=[(1-z-1)vn((k-1)+1),…,
(1-z-1)vn((k-1)+P)]T
(13)
通过式(13)可得到动态子系统的GPC。
A(k)=A(k-1)+(1-z-1)A(k)
(14)
A(k)计算出以后,通过解静态非线性方程u(k)=f-1(A(k),v(k)),即可计算出列车控制量u(k)。
3 算法流程

Step2 用递推最小二乘法辨识CARIMA模型参数B;
Step3 根据式(14)求得A(k),通过u(k)=f-1(A(k),v(k))求得动车组列车所需的控制量;
Step4 CPSO寻优按PSO分群和CPSO分群两种方式进行。PSO分群、CPSO分群在t时刻的个体极值分别用Pg(t)、Cg(t)表示,PSO分群、CPSO分群在t时刻的全局历史极值分别用Pq(t)、Cq(t)表示。粒子适应度函数选择
将f(Vn)与两个分群寻优的个体极值和全部历史极值进行比较,若更优则替换,否则保留。循环此流程,直至相邻两代输出值之差vd小于某一设定值。
Step5 选出f(Vn)最高的子群体,直接参与下一代进化。
Step6 释放以前的非最优子群体,对于重复出现的子群体仅保留一个。
Step7 CPSO是否进化了规定代数,如否,则转到Step6,否则输出Vn。
Step8 若k=k+1,则返回Step2。
4 仿真结果与分析
以CRH2型动车组列车制动系统模型[7]为基础,采用GPC、CPSO-GPC对比的方式验证CPSO-GPC控制器的有效性,其动态子系统模型为
静态子系统特性如表1所示。

表1 静态子系统特性表
取CPSO-GPC控制器参数为P=3,l=1,α=0.57,λ=0.1,N=100,优胜子群体数为20,子群体中的个体数为30,寻优结束条件为vd<1 m/s,CPSO进化50代结束。寻优得到的参数项依次为τ=1.18 s,T1=0.256 s,T2=0.556 s。为使列车接近于实际运行过程,考虑干扰因素,列车速度设定值呈非线性。
图3为GPC、CPSO-GPC两种控制器的速度跟踪曲线图,vs表示给定速度曲线,vG、vc分别表示GPC、CPSO-GPC的速度跟踪曲线。从图3中的列车运行过程可以看,vc的跟踪误差远远低于vG,满足高速列车对给定速度的精确跟踪及定点停车的要求。
图4为GPC、CPSO-GPC两种控制器的位移跟踪曲线图,ys表示位移目标曲线,yG、yc分别表示GPC、CPSO-GPC的位移跟踪曲线。从图4中的列车运行过程可以看,yG的跟踪能力不及yc,然而yc的跟踪误差较小,满足高速列车定点精确停车的要求。
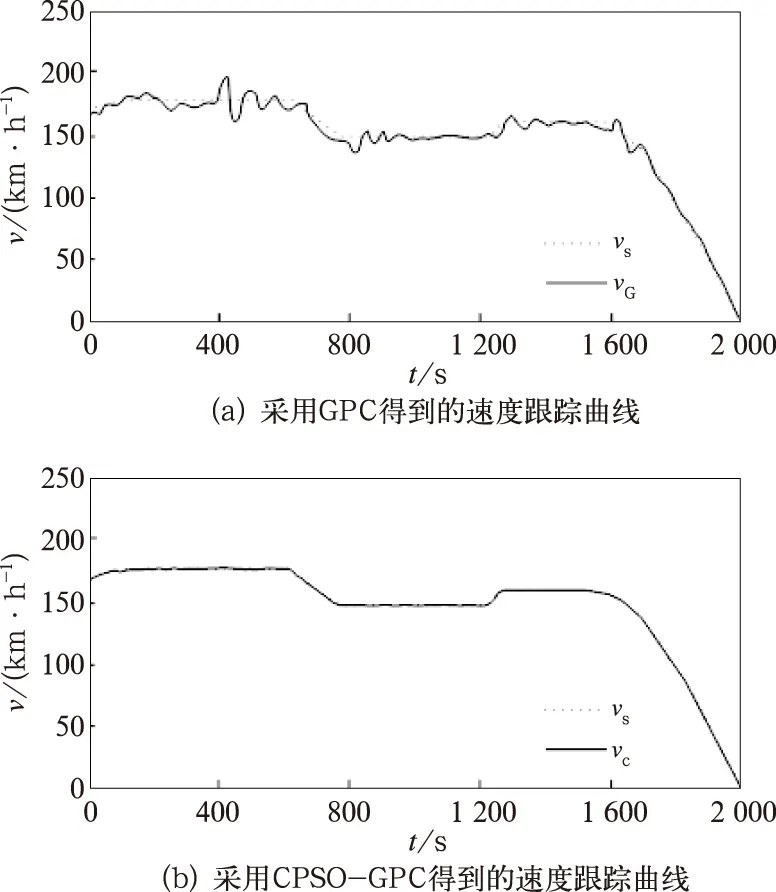
图3 速度跟踪曲线
图5为分别采用GPC、CPSO-GPC两种控制器得到的控制量曲线图。从图5可知,采用GPC得到的控制量u,在列车运行过程中变化率较大,影响乘客的舒适度;而CPSO-GPC得到的控制量使列车运行过程变的平稳,进一步提高乘客的舒适度。

图4 位移跟踪曲线
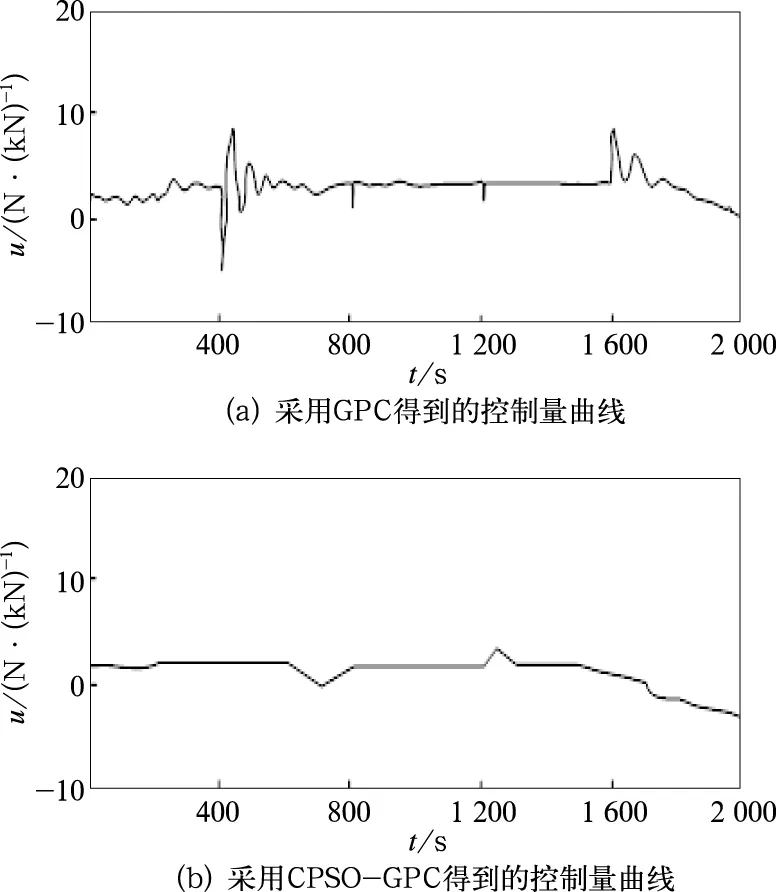
图5 控制量曲线
5 结 论
根据列车制动系统的性能和要求,提出了CPSO-GPC控制方式。仿真结果表明, CPSO-GPC控制实现了对列车给定速度及位移曲线的高精度跟踪,满足列车安全、准时、舒适、精确停车的要求。
